






温湿度采集与OLED显示
一.I2C通信总线协议
1、I2C总线简介
I2C总线是Philips公司在八十年代初推出的一种串行、半双工的总线,主要用于近距离、低速的芯片之间的通信;I2C总线有两根双向的信号线,一根数据线SDA用于收发数据,一根时钟线SCL用于通信双方时钟的同步;I2C总线硬件结构简单,简化了PCB布线,降低了系统成本,提高了系统可靠性,因此在各个领域得到了广泛应用。
I2C总线是一种多主机总线,连接在 I2C总线上的器件分为主机和从机。主机有权发起和结束一次通信,从机只能被动呼叫;当总线上有多个主机同时启用总线时,I2C也具备冲突检测和仲裁的功能来防止错误产生;每个连接到I2C总线上的器件都有一个唯一的地址(7bit),且每个器件都可以作为主机也可以作为从机(但同一时刻只能有一个主机),总线上的器件增加和删除不影响其他器件正常工作;I2C总线在通信时总线上发送数据的器件为发送器,接收数据的器件为接收器。
I2C总线可以通过外部连线进行在线检测,便于系统故障诊断和调试,故障可以立即被寻址,软件也有利于标准化和模块化,缩短开发时间。
I2C总线上可挂接的设备数量受总线的最大电容400pF限制。
串行的8位双向数据传输速率在标准模式下可达100Kbit/s,快速模式下可达400Kbit/s,高速模式下可达3.4Mbit/s。
总线具有极低的电流消耗,抗噪声干扰能力强,增加总线驱动器可以使总线电容扩大10倍,传输距离达到15m;兼容不同电压等级的器件,工作温度范围宽。
二、主要特性
IIC用2根信号线通信:串行数据线 SDA、串行时钟线 SCL;
IIC总线上所有器件的SDA、SCL引脚输出驱动都为 开漏(OD) 结构,通过外接上拉电阻实现总线上所有节点SDA、SCL信号的线与逻辑关系;
总线上的所有设备通过软件寻址且具有唯一的地址(7位或10位)。7位“从机专用地址码”,其高4位为由生产厂家制定的设备类型地址,低3位为器件引脚定义地址(由使用者定义);10位地址不常见;
任何时刻都只存在简单的主从关系,按数据传输的方向,主机可以是主发送器或主接收器;
支持多主机。在总线上存在多个主机时,通过冲突检测和仲裁机制防止多个主机同时发起数据传输时存在的冲突;
IIC总线上所有器件都具有“自动应答”功能,保证数据传输的正确性; 主机和从机的区别在于对SCL的发送权,只有主机才能发送SCL;
IIC总线允许挂载最多的设备数量取决于总线上最大电容值,一般为400pf(Hs模式100pf)
IIC总线不仅广泛应用于电路板级的内部通信,还可以通过I2C总线驱动器进行不同系统间的通信; 支持传输速率包括:
模式 速度
标准模式(Standard Mode) 100kb/s
快速模式(Fast Mode) 400kb/s
增强快速模式(Fast Mode Plus) 1Mb/s
高速模式(High Speed Mode) 3.4Mb/s
极速模式(Ultra-FastMode) 5Mb/s
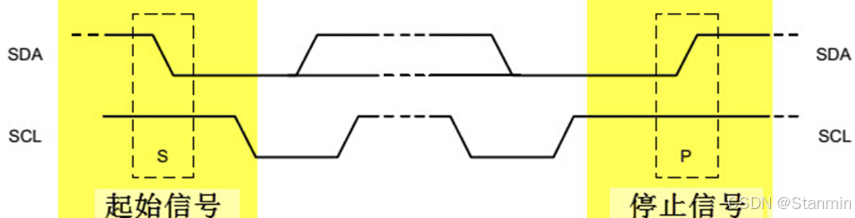
3.硬件I2C和软件I2C
硬件 I2C
定义:硬件 I2C 是指 STM32 芯片内部集成的 I2C 控制器硬件电路来实现 I2C 通信协议。它使用芯片内部的专门 I2C 模块,这个模块有自己的寄存器和硬件逻辑,可以自动处理 I2C 通信的时序,如起始信号、停止信号、数据位的发送和接收以及应答信号等。
优点:
效率高,因为硬件电路专门用于 I2C 通信,能够以较快的速度处理数据传输,不需要占用过多的 CPU 资源。例如,在高速数据传输的应用场景中,硬件 I2C 可以快速地将数据从传感器传输到微控制器,不会因为软件处理的延迟而降低传输效率。
准确性高,硬件电路严格按照 I2C 协议的时序进行操作,减少了由于软件编程错误导致的通信错误。它可以精确地控制 SCL(时钟线)和 SDA(数据线)的电平变化时间,确保数据传输的准确性。
缺点:
硬件 I2C 的引脚功能是固定的,一旦使用了硬件 I2C 功能,对应的引脚就不能用于其他功能。例如,在 STM32F103 中,I2C1 的 SCL 和 SDA 引脚是固定的,如果这些引脚在硬件设计中已经被其他功能占用,就无法使用该硬件 I2C 接口。
硬件 I2C 的灵活性相对较差,它的一些参数(如时钟频率等)可能受到硬件限制,不能像软件 I2C 那样方便地进行修改。
软件 I2C
定义:软件 I2C 是通过软件编程的方式,使用 STM32 的普通 GPIO 引脚来模拟 I2C 协议的时序。在这种方式下,没有使用芯片内部专门的 I2C 硬件模块,而是通过对 GPIO 引脚进行高低电平的操作来模拟 I2C 的起始信号、停止信号、数据位发送和接收以及应答信号等。
优点:
灵活性高,可以使用任意的 GPIO 引脚作为 I2C 的 SCL 和 SDA 线。这在硬件引脚资源有限或者硬件设计已经固定,无法使用硬件 I2C 引脚的情况下非常有用。例如,如果一个项目中已经将硬件 I2C 引脚用于其他重要功能,而又需要添加 I2C 设备,就可以使用软件 I2C,通过其他空闲的 GPIO 引脚来实现通信。
可以方便地调整通信的时序参数。通过软件编程,可以灵活地控制 SCL 的时钟频率、数据位的传输时间等参数,以适应不同速度的 I2C 设备或者满足特殊的通信要求。
缺点:
占用较多的 CPU 资源。因为软件 I2C 需要 CPU 不断地对 GPIO 引脚进行电平操作和延时控制,在数据传输过程中会占用大量的 CPU 时间。特别是在高速通信或者 CPU 需要同时处理多个任务的情况下,可能会影响系统的整体性能。
软件模拟 I2C 的时序对编程要求较高,容易出现时序错误。如果软件编写不当,可能会导致通信错误,例如起始信号和停止信号的时间不符合 I2C 协议要求,数据位传输时间过长或过短等问题。
二.OLED显示屏简介
OLED即有机发光二极管(Organic Light-Emitting Diode),又称为有机电激光显示,OLED 由于同时具备自发光,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术,LCD 都需要背光,而 OLED 不需要,因为它是自发光的。这样同样的显示,OLED 效果要来得好一些,以目前的技术,OLED 的尺寸还难以大型化,但是分辨率确可以做到很高。
三基于AHT20温湿度采集-串口显示上位机
1.AHT20基本原理
(1) AHT20介绍
AHT20是一款数字式温湿度传感器,具有高精度、快速响应和低功耗的特点。能够准确测量环境的温度和湿度,并通过I2C接口与主控设备进行通信。要实现AHT20温湿度传感器的数据采集,首先需要阅读AHT20的数据手册,了解其通信协议和指令。然后,可以使用STM32F103的硬件I2C或软件I2C来实现与AHT20的通信。在采集到温湿度数据后,可以通过编程控制OLED显示相应的温湿度值。同时,使用STM32F103的串口功能,将采集到的温湿度数据发送到上位机的“串口助手”软件。具体实现步骤如下:
1)初始化STM32F103的硬件I2C或软件I2C,并配置相应的引脚。
2)根据AHT20的数据手册,编写相应的指令,实现对AHT20的初始化和温湿度数据采集。
3)初始化OLED显示屏,并编写相应的显示程序,将采集到的温湿度数据显示到OLED上。
4)初始化STM32F103的串口功能,并编写相应的发送程序,将采集到的温湿度数据通过串口发送到上位机的“串口助手”软件。
5)编写主循环程序,每隔2秒钟调用一次温湿度数据采集和显示发送程序。
(2)AHT20芯片信息
官方产品介绍文档:http://www.aosong.com/class-36.html
(3)AHT20的硬件连接
AHT20的SCL,GND,SDA,VCC分别对应接stm32f103指南者i2c模块的B6,GND,B7,3.3V。
2.工程创建
(1)任务描述
每隔2秒钟采集一次温湿度数据,并通过串口发送到上位机(win10)。
(2)具体过程
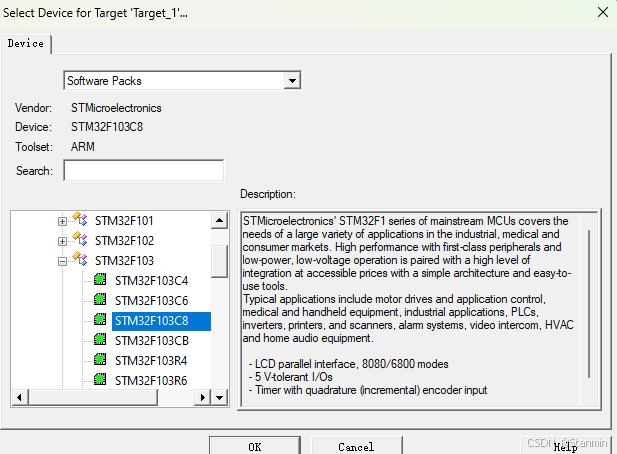
首先打开keil5软件,创建一个空的keil工程,我将其命名为:AHT20,然后在这个工程中继续新建一个project用来存放文件,完成以后选择STM32F103C8系列的芯片,选好以后,会弹出一个窗口,直接差点即可,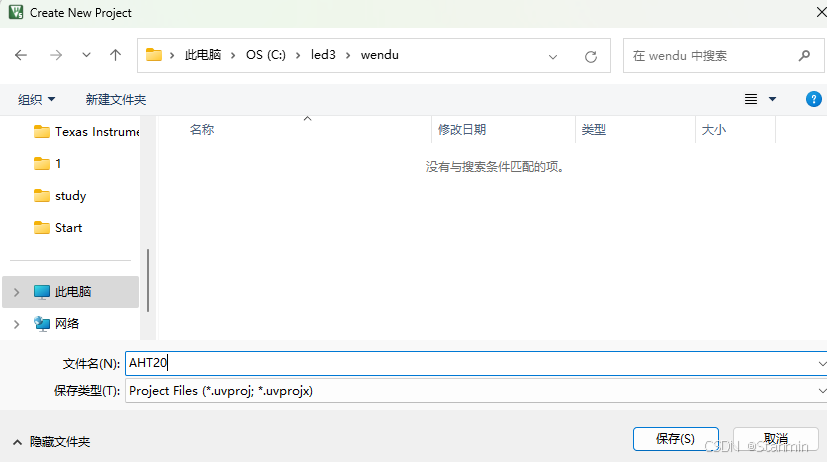
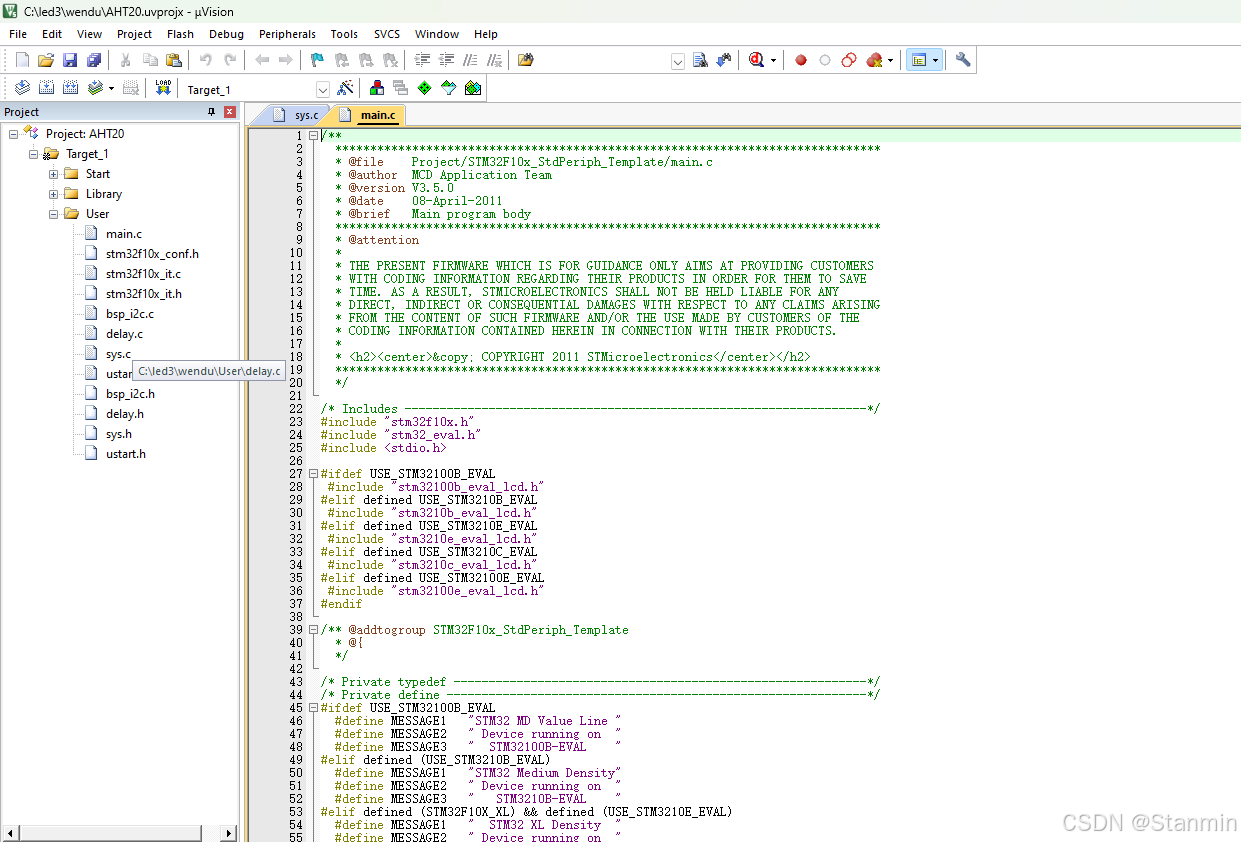
完成以后,点开工程,可以看到以下界面: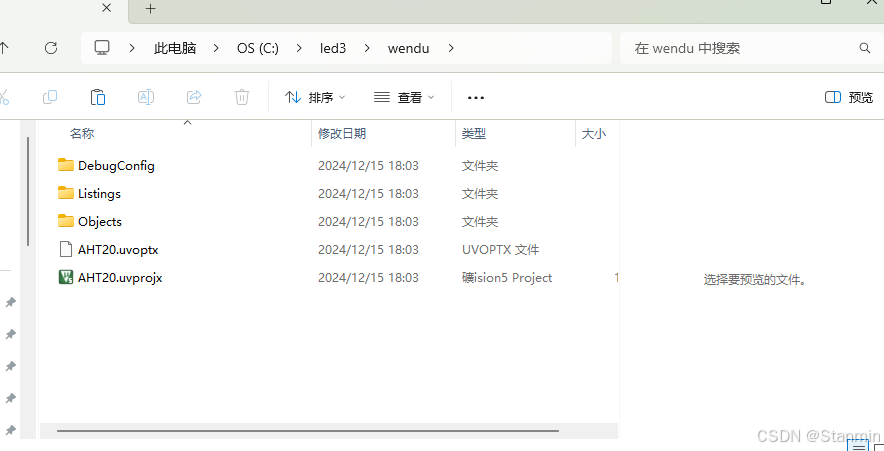 接着需要在新建的AHT20工程中添加基本的Start、LIbrary、User这三个文件,文件的具体移植内容参考b站江协科技,也可参考笔者的博客:https://blog.youkuaiyun.com/2301_78300727/article/details/143824776,移植好文件内容后,可以看到工程中的文件如下:
接着需要在新建的AHT20工程中添加基本的Start、LIbrary、User这三个文件,文件的具体移植内容参考b站江协科技,也可参考笔者的博客:https://blog.youkuaiyun.com/2301_78300727/article/details/143824776,移植好文件内容后,可以看到工程中的文件如下:
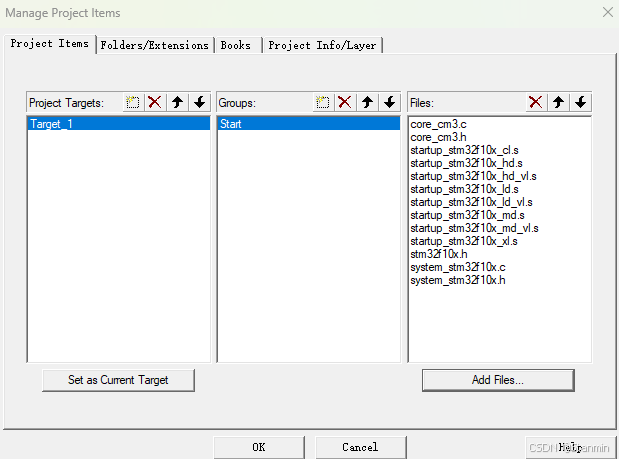
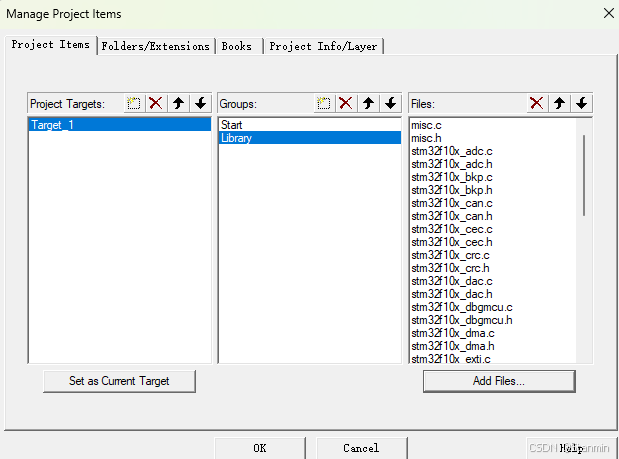
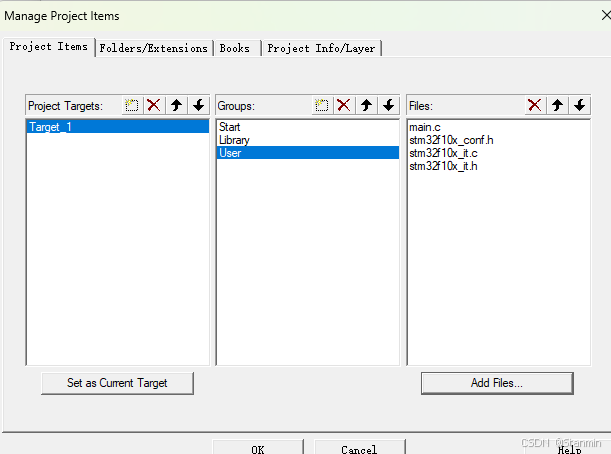
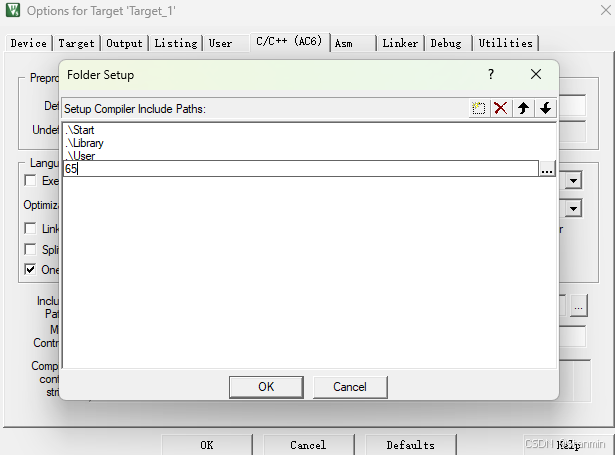
然后重新进入keil中,添加刚才的文件以及相关的路径,点击三个小箱子后,新建三个名为:Start、Library、User的文件,然后分别进行“Add Files”,
然后添加路径,点击魔术棒,选择“C/C++”,找到“include paths”,完成路径的添加,
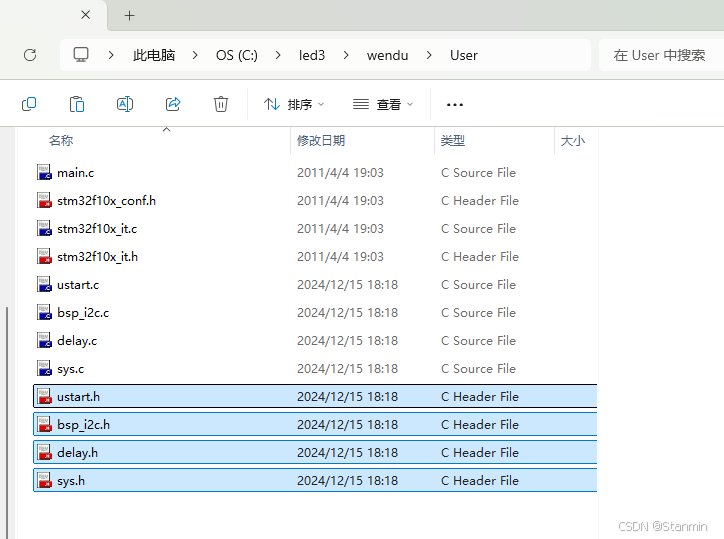
下一步就是最重要的固件库添加AHT20相关代码,先在工程文件夹的User中添加几个文件,分别为:usart.c、usart.h、bsp_i2c.c、bsp_i2c.h、delay.c、delay.h、sys.c、sys.h,然后再打开keil工程在User中把这几个文件添加进去(可以只添加.c文件,我由于习惯把.h文件也加进去了),如下图:
3.相关代码
(1)usart.c:
#include "sys.h"
#include "usart.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯
//
//
//¼ÓÈëÒÔÏ´úÂë,Ö§³Öprintfº¯Êý,¶ø²»ÐèҪѡÔñuse MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{
int handle;
};
FILE __stdout;
//¶¨Òå_sys_exit()ÒÔ±ÜÃâʹÓðëÖ÷»úģʽ
void _sys_exit(int x)
{
x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART1->DR = (u8) ch;
return ch;
}
#endif
/*ʹÓÃmicroLibµÄ·½·¨*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
//×¢Òâ,¶ÁÈ¡USARTx->SRÄܱÜÃâĪÃûÆäÃîµÄ´íÎó
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.
//½ÓÊÕ״̬
//bit15£¬ ½ÓÊÕÍê³É±êÖ¾
//bit14£¬ ½ÓÊÕµ½0x0d
//bit13~0£¬ ½ÓÊÕµ½µÄÓÐЧ×Ö½ÚÊýÄ¿
u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç
void uart_init(u32 bound){
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú
}
void USART1_IRQHandler(void) //´®¿Ú1ÖжϷþÎñ³ÌÐò
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ý
if((USART_RX_STA&0x8000)==0)//½ÓÊÕδÍê³É
{
if(USART_RX_STA&0x4000)//½ÓÊÕµ½ÁË0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//½ÓÊÕ´íÎó,ÖØпªÊ¼
else USART_RX_STA|=0x8000; //½ÓÊÕÍê³ÉÁË
}
else //»¹Ã»ÊÕµ½0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ
}
}
}
}
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntExit();
#endif
}
#endif
(2)usart.h:
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯
#define USART_REC_LEN 200 //¶¨Òå×î´ó½ÓÊÕ×Ö½ÚÊý 200
#define EN_USART1_RX 1 //ʹÄÜ£¨1£©/½ûÖ¹£¨0£©´®¿Ú1½ÓÊÕ
extern u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.Ä©×Ö½ÚΪ»»Ðзû
extern u16 USART_RX_STA; //½ÓÊÕ״̬±ê¼Ç
//Èç¹ûÏë´®¿ÚÖжϽÓÊÕ£¬Ç벻ҪעÊÍÒÔϺ궨Òå
void uart_init(u32 bound);
#endif
(3)bsp_i2c.c:
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{
SDA_OUT(); //sdaÏßÊä³ö
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{
SDA_OUT();//sdaÏßÊä³ö
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅ
delay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDAÉèÖÃΪÊäÈë
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//ʱÖÓÊä³ö0
return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êä
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄ
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAÉèÖÃΪÊäÈë
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//·¢ËÍnACK
else
IIC_Ack(); //·¢ËÍACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½Ú
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·
else
IIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú
IIC_Wait_Ack();
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return data;
}
/**********
*ÉÏÃ沿·ÖΪIO¿ÚÄ£¿éI2CÅäÖÃ
*
*´ÓÕâÒÔÏ¿ªÊ¼ÎªAHT20µÄÅäÖÃI2C
*º¯ÊýÃûÓÐIICºÍI2CµÄÇø±ð£¬Çë×¢Ò⣡£¡£¡£¡£¡
*
*2020/2/23×îºóÐÞ¸ÄÈÕÆÚ
*
***********/
void read_AHT20_once(void)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
/*
AHT20_OutData[0] = 0;
AHT20_OutData[1] = 0;
AHT20_OutData[2] = 0;
AHT20_OutData[3] = 0;
*/
}
void init_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT20(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("ʧ°ÜÁË");
}
printf("\r\n");
printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];
// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;
// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
(4)bsp_i2c.h:
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA
//IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅ
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
(5)delay.c:
#include "delay.h"
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms
//
static u8 fac_us=0;//usÑÓʱ±¶³ËÊý
static u16 fac_ms=0;//msÑÓʱ±¶³ËÊý
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
//systickÖжϷþÎñº¯Êý,ʹÓÃucosʱÓõ½
void SysTick_Handler(void)
{
OSIntEnter(); //½øÈëÖжÏ
OSTimeTick(); //µ÷ÓÃucosµÄʱÖÓ·þÎñ³ÌÐò
OSIntExit(); //´¥·¢ÈÎÎñÇл»ÈíÖжÏ
}
#endif
//³õʼ»¯ÑÓ³Ùº¯Êý
//µ±Ê¹ÓÃucosµÄʱºò,´Ëº¯Êý»á³õʼ»¯ucosµÄʱÖÓ½ÚÅÄ
//SYSTICKµÄʱÖӹ̶¨ÎªHCLKʱÖÓµÄ1/8
//SYSCLK:ϵͳʱÖÓ
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //Ñ¡ÔñÍⲿʱÖÓ HCLK/8
fac_us=SystemCoreClock/8000000; //ΪϵͳʱÖÓµÄ1/8
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
reload=SystemCoreClock/8000000; //ÿÃëÖӵļÆÊý´ÎÊý µ¥Î»ÎªK
reload*=1000000/OS_TICKS_PER_SEC;//¸ù¾ÝOS_TICKS_PER_SECÉ趨Òç³öʱ¼ä
//reloadΪ24λ¼Ä´æÆ÷,×î´óÖµ:16777216,ÔÚ72MÏÂ,Ô¼ºÏ1.86s×óÓÒ
fac_ms=1000/OS_TICKS_PER_SEC;//´ú±íucos¿ÉÒÔÑÓʱµÄ×îÉÙµ¥Î»
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //¿ªÆôSYSTICKÖжÏ
SysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SECÃëÖжÏÒ»´Î
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //¿ªÆôSYSTICK
#else
fac_ms=(u16)fac_us*1000;//·ÇucosÏÂ,´ú±íÿ¸ömsÐèÒªµÄsystickʱÖÓÊý
#endif
}
#ifdef OS_CRITICAL_METHOD //ʹÓÃÁËucos
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOADµÄÖµ
ticks=nus*fac_us; //ÐèÒªµÄ½ÚÅÄÊý
tcnt=0;
told=SysTick->VAL; //¸Õ½øÈëʱµÄ¼ÆÊýÆ÷Öµ
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;//ÕâÀï×¢ÒâÒ»ÏÂSYSTICKÊÇÒ»¸öµÝ¼õµÄ¼ÆÊýÆ÷¾Í¿ÉÒÔÁË.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;//ʱ¼ä³¬¹ý/µÈÓÚÒªÑÓ³ÙµÄʱ¼ä,ÔòÍ˳ö.
}
};
}
//ÑÓʱnms
//nms:ÒªÑÓʱµÄmsÊý
void delay_ms(u16 nms)
{
if(OSRunning==TRUE)//Èç¹ûosÒѾÔÚÅÜÁË
{
if(nms>=fac_ms)//ÑÓʱµÄʱ¼ä´óÓÚucosµÄ×îÉÙʱ¼äÖÜÆÚ
{
OSTimeDly(nms/fac_ms);//ucosÑÓʱ
}
nms%=fac_ms; //ucosÒѾÎÞ·¨ÌṩÕâôСµÄÑÓʱÁË,²ÉÓÃÆÕͨ·½Ê½ÑÓʱ
}
delay_us((u32)(nms*1000)); //ÆÕͨ·½Ê½ÑÓʱ,´ËʱucosÎÞ·¨Æô¶¯µ÷¶È.
}
#else//²»ÓÃucosʱ
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //ʱ¼ä¼ÓÔØ
SysTick->VAL=0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
//ÑÓʱnms
//×¢ÒânmsµÄ·¶Î§
//SysTick->LOADΪ24λ¼Ä´æÆ÷,ËùÒÔ,×î´óÑÓʱΪ:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLKµ¥Î»ÎªHz,nmsµ¥Î»Îªms
//¶Ô72MÌõ¼þÏÂ,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//ʱ¼ä¼ÓÔØ(SysTick->LOADΪ24bit)
SysTick->VAL =0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
#endif
(6)delay.h:
#ifndef __DELAY_H
#define __DELAY_H
#include "sys.h"
//
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms
//
void delay_init(void);
void delay_ms(u16 nms);
void delay_us(u32 nus);
#endif
(7)sys.c:
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//STM32¿ª·¢°å
//ϵͳÖжϷÖ×éÉèÖû¯
//********************************************************************************
void NVIC_Configuration(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶
}
(8)sys.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
//
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//0,²»Ö§³Öucos
//1,Ö§³Öucos
#define SYSTEM_SUPPORT_UCOS 0 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖUCOS
//λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ
//¾ßÌåʵÏÖ˼Ïë,²Î¿¼<<CM3ȨÍþÖ¸ÄÏ>>µÚÎåÕÂ(87Ò³~92Ò³).
//IO¿Ú²Ù×÷ºê¶¨Òå
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO¿ÚµØÖ·Ó³Éä
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú!
//È·±£nµÄֵСÓÚ16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë
void NVIC_Configuration(void);
#endif
(9)main.c:
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
int main(void)
{
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
uart_init(115200); //´®¿Ú³õʼ»¯Îª115200
IIC_Init();
while(1)
{
printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");
read_AHT20_once();
delay_ms(1500);
}
}
4.效果展示
wendu1
四.OLED显示姓名学号
1.点阵编码原理
(1) 在汉字的点阵字库中,每个字节的每个位都代表一个汉字的一个点,每个汉字都是由一个矩形的点阵组成,0代表没有,1代表有点,将0和1分别用不同颜色画出,就形成了一个汉字,常用的点阵矩阵有12x12, 14x14, 16x16三种字库。
(2)字库根据字节所表示点的不同有分为横向矩阵和纵向矩阵,目前多数的字库都是横向矩阵的存储方式(用得最多的应该是早期UCDOS字库),纵向矩阵一般是因为有某些液晶是采用纵向扫描显示法,为了提高显示速度,于是便把字库矩阵做成纵向,省得在显示时还要做矩阵转换。我们接下去所描述的都是指横向矩阵字库。
2.实现过程
(1)下载字库工具,将汉字变成点阵
首先点击PCtoolCD2002.exe取模软件,模式选择字符模式,
然后点击设置,进行如下配置,再点击确定:
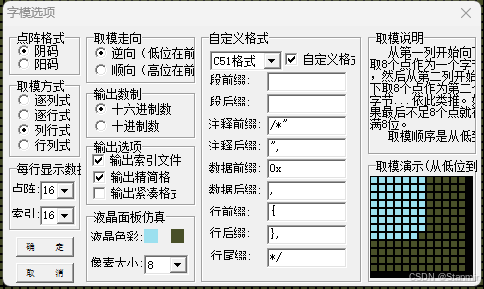
在输入框中输入自己的姓名,生成16进制字模符号:
复制下方生成的16进制字符,后续会用到。
(2)工程创立
(2)工程创立
注:这里是采用江协科技的方法,并没有使用商家的代码,江协科技的视频链接如下:
https://www.bilibili.com/video/BV1EN41177Pc/
首先先下载江协科技相关的文件,对应的链接:https://jiangxiekeji.com/download.html,选择0.96寸OLED的资料进行下载:
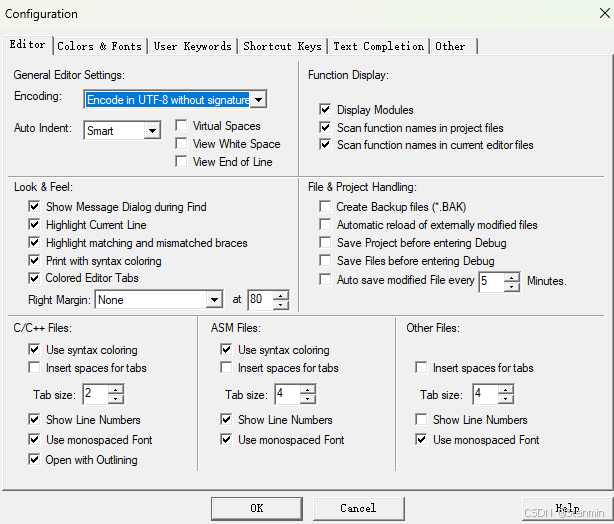
下载完成后,找到工程模板UTF-8,后续的操作全部基于这个工程进行,用keil打开这个工程,点击扳手,修改Encoding为UTF-8格式:

下一步就是进行代码移植 ,按照如下路径找到Hardware文件,复制里面的四个文件:
复制完成后,回到工程测试的文件夹(大家自行修改这个文件夹的名字,我这里为了显示清楚,保留不变),也新建一个Hardware文件,粘贴刚才复制的四个文件:
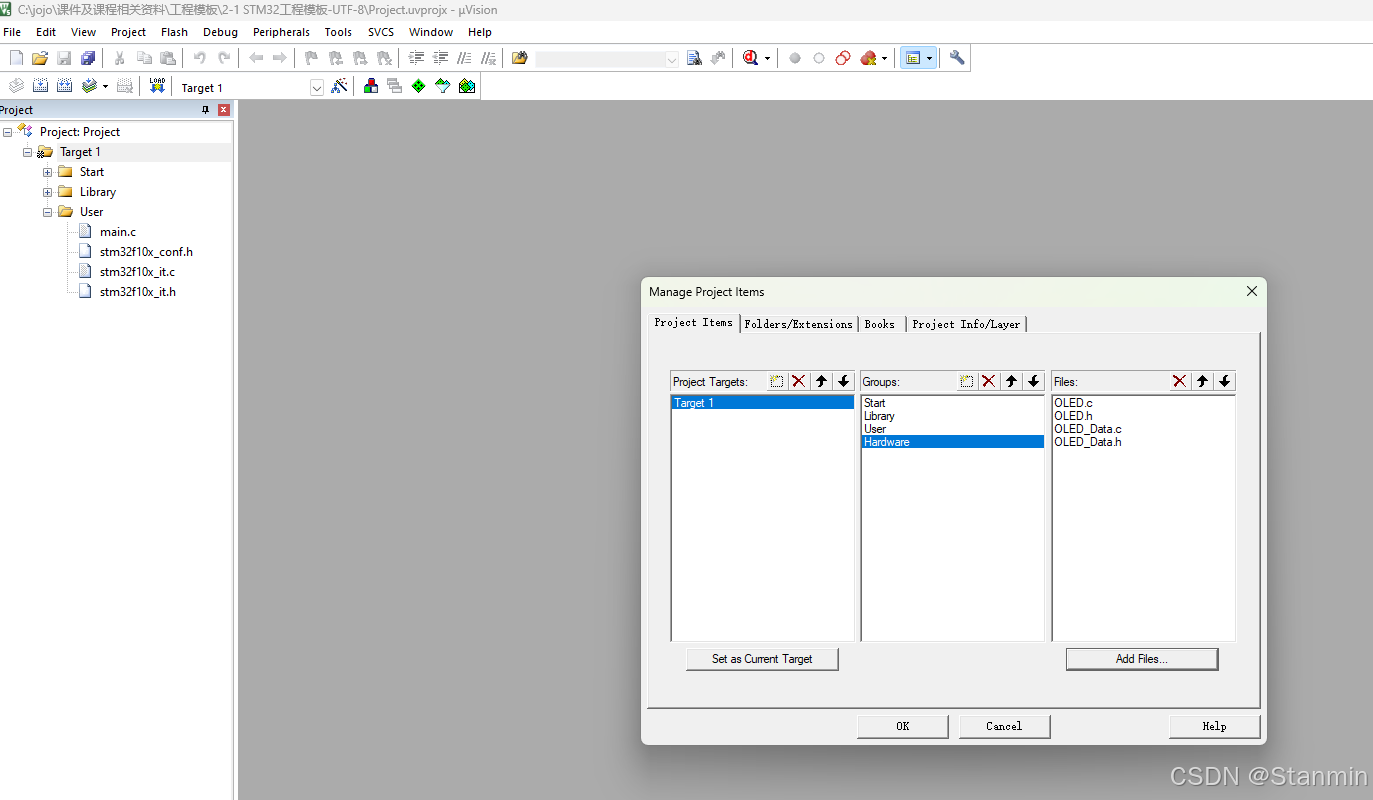
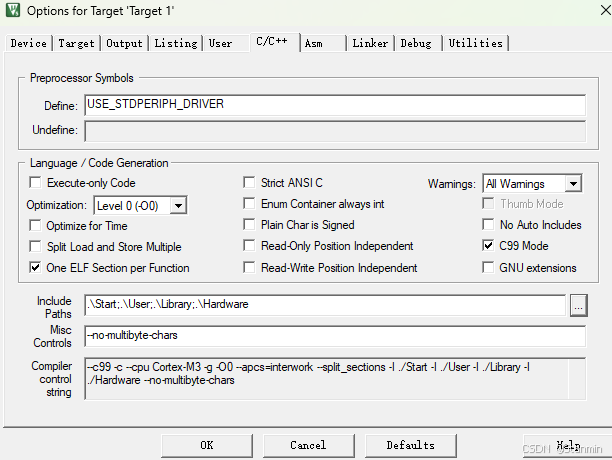
然后打开keil,添加Hardware文件以及相关的路径:
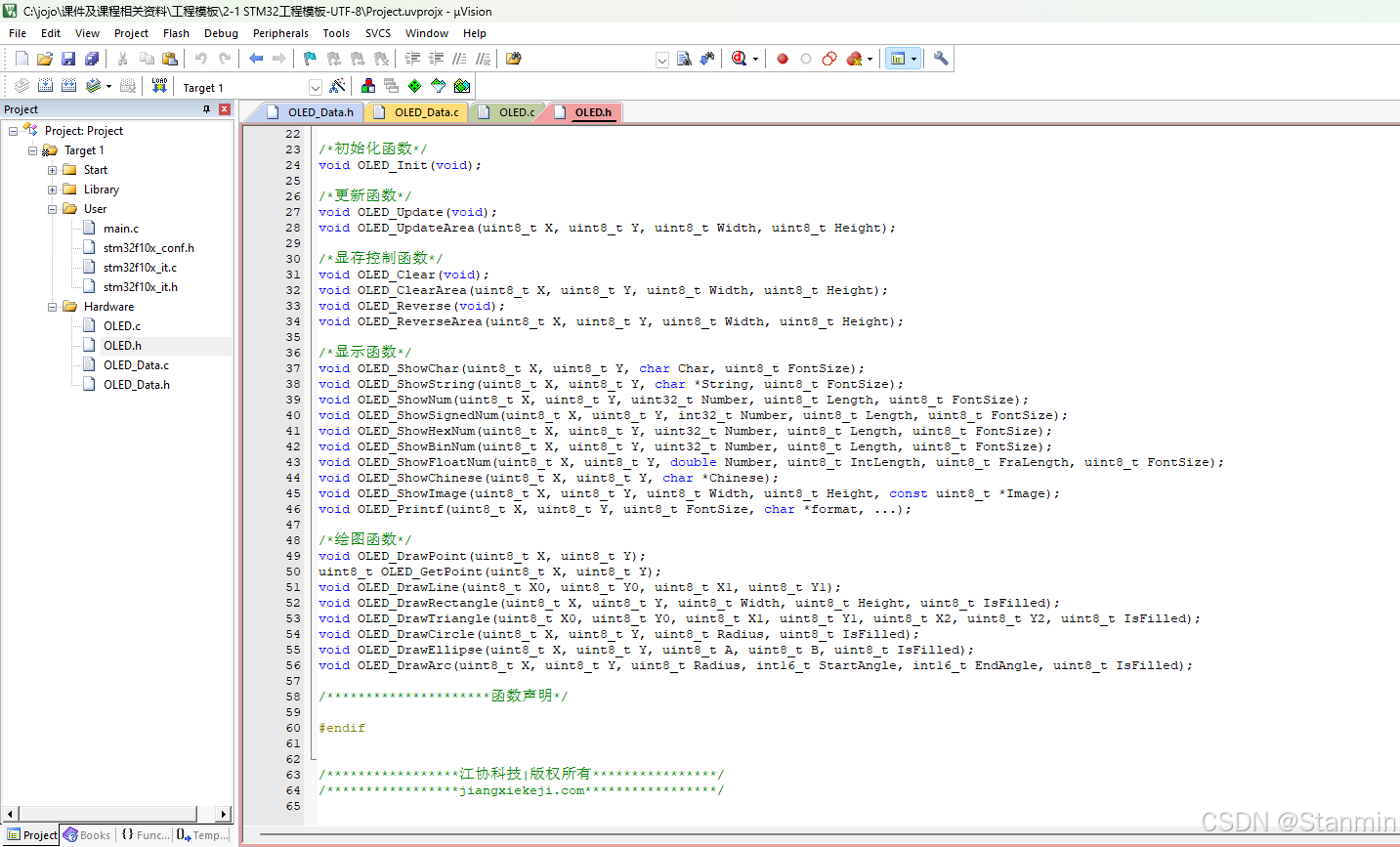
点开OLED_Data.h,可以看到许多显示函数的定义,我们想在OLED屏幕上显示内容,就是需要对这些显示函数进行操作:
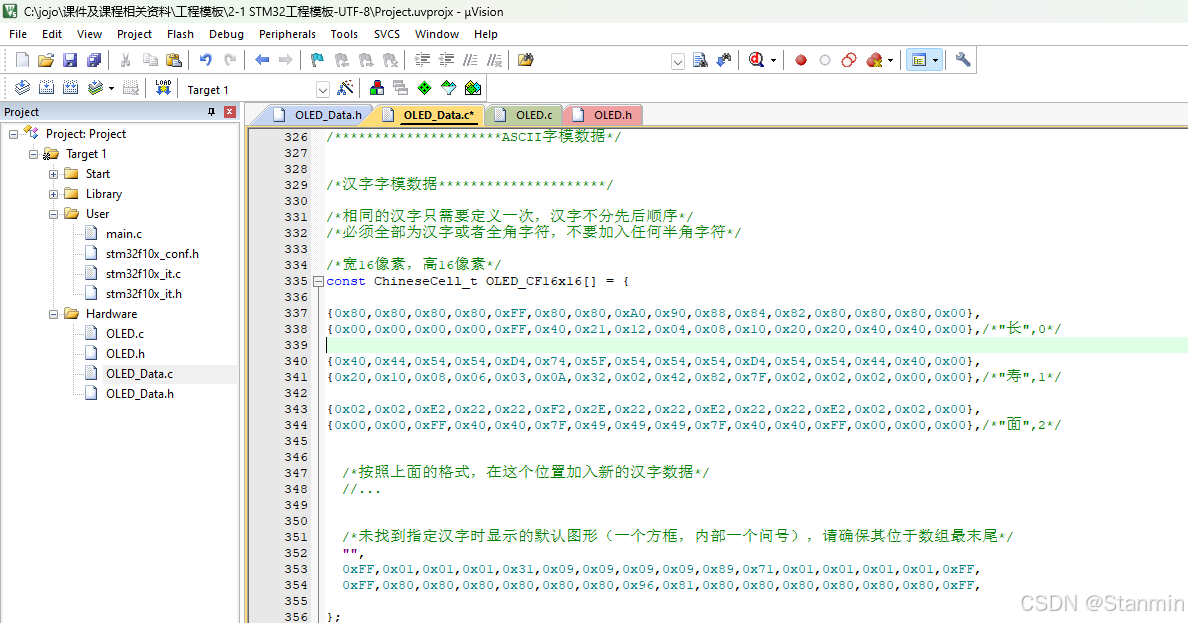
 下一步就需要把字模软件生成的16进制字符进行复制,找到OLED_Data.c中下图所示的函数,把名字的字符粘贴进去:
下一步就需要把字模软件生成的16进制字符进行复制,找到OLED_Data.c中下图所示的函数,把名字的字符粘贴进去:
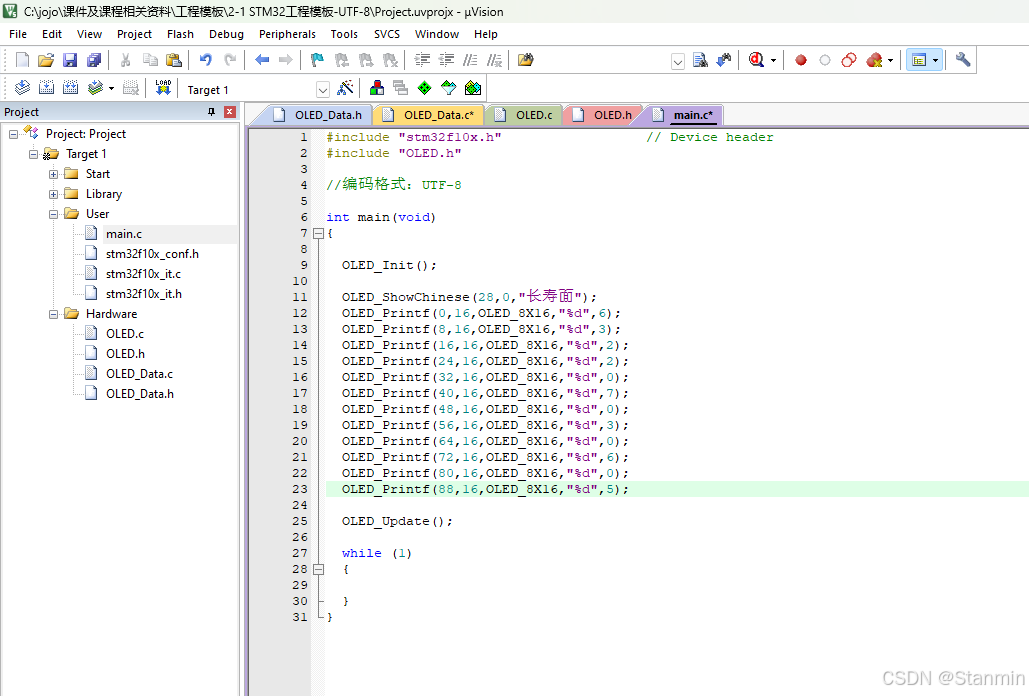
最后回到main.c中,编写相关代码(使用的就是前面所展示的显示函数),界面如下:
3.相关代码
主函数代码如下,相应修改自己的名字和学号即可:
#include "stm32f10x.h" // Device header
#include "OLED.h"
//编码格式:UTF-8
int main(void)
{
OLED_Init();
OLED_ShowChinese(28,0,"长寿面");
OLED_Printf(0,16,OLED_8X16,"%d",6);
OLED_Printf(8,16,OLED_8X16,"%d",3);
OLED_Printf(16,16,OLED_8X16,"%d",2);
OLED_Printf(24,16,OLED_8X16,"%d",2);
OLED_Printf(32,16,OLED_8X16,"%d",0);
OLED_Printf(40,16,OLED_8X16,"%d",7);
OLED_Printf(48,16,OLED_8X16,"%d",0);
OLED_Printf(56,16,OLED_8X16,"%d",3);
OLED_Printf(64,16,OLED_8X16,"%d",0);
OLED_Printf(72,16,OLED_8X16,"%d",6);
OLED_Printf(80,16,OLED_8X16,"%d",0);
OLED_Printf(88,16,OLED_8X16,"%d",5);
OLED_Update();
while (1)
{
}
}
4.实现效果
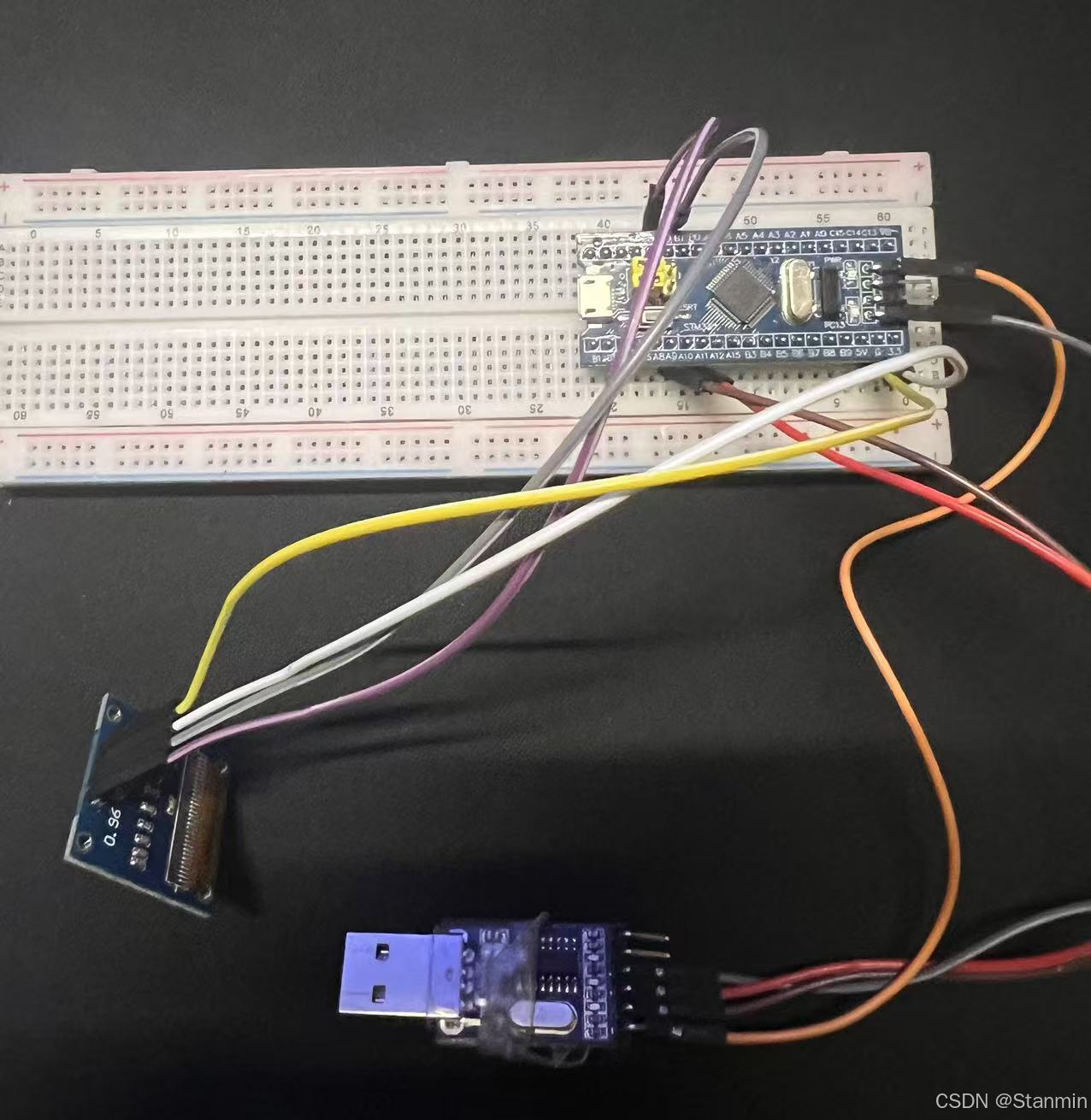
OLED的scl和sdk的具体连接要参考定义来看,江协用的时PB8和PB9,如果是厂家的代码可能是PB10和PB11,硬件连接图如下图:
最终效果如下图所示:
五.基于u8g2库—OLED滚动显示长字符
1.图形库U8g2移植到STM32单片机上
(1)HAL库建立新工程
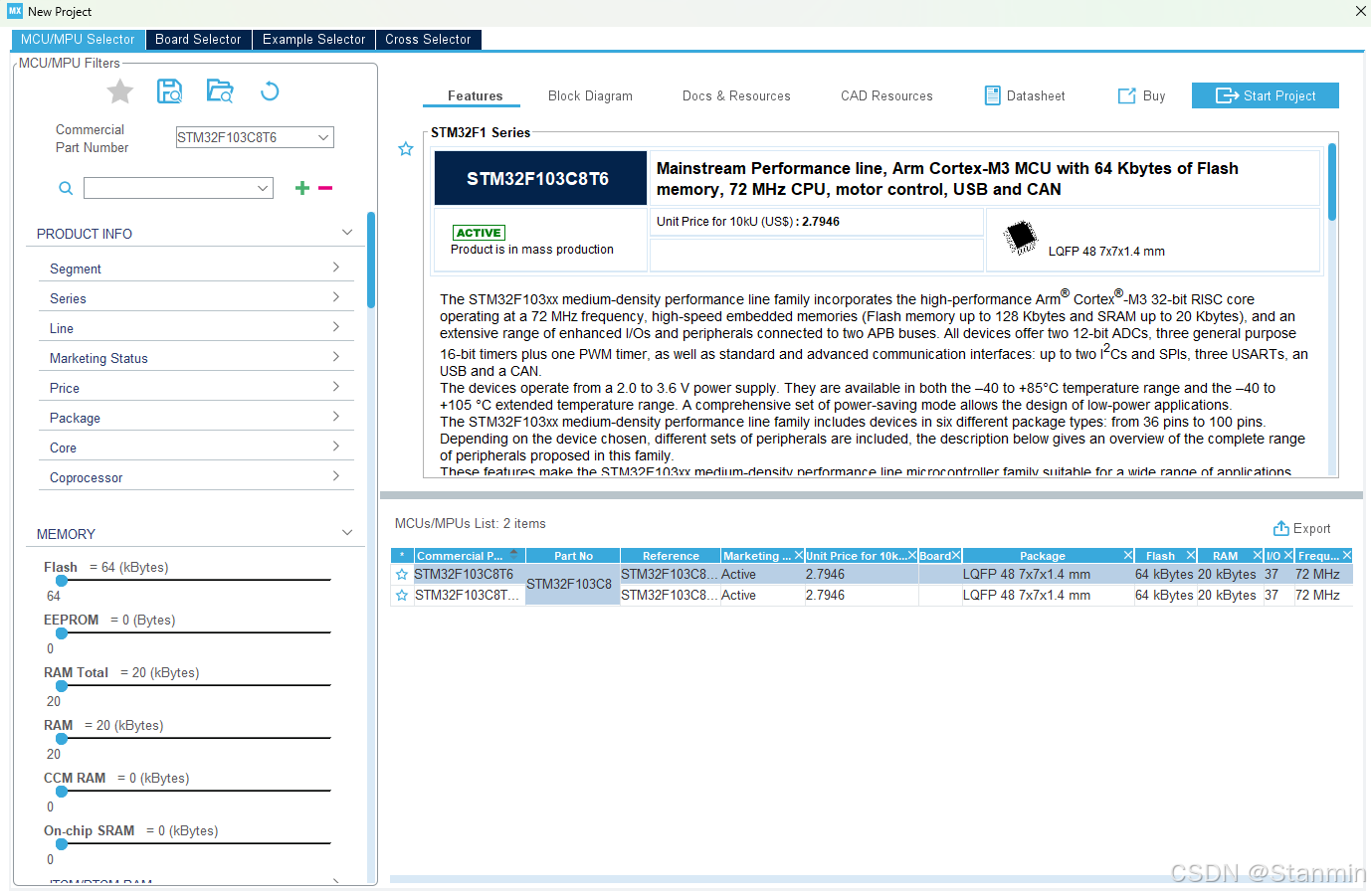
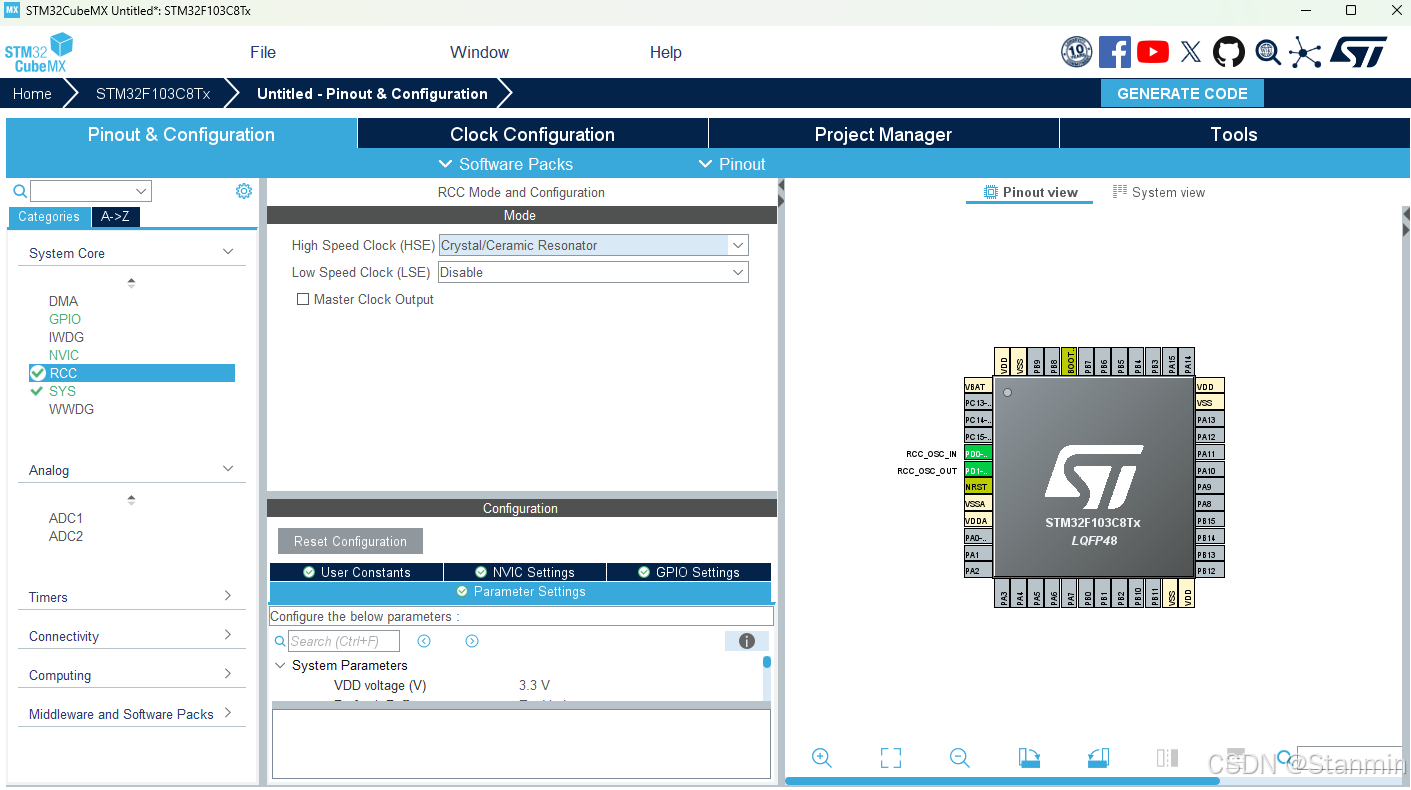
在移植U8g2库之前,我们需要使用CubeMX软件配置一下MCU的部分功能。特别注意:U8g2图形库自带兼容的IC控制驱动程序,所以移植完成后不需要自己在写OLED或是LCD的驱动了。打开STM32CubeMX,新建一个工程,选中STM32F103C8T6芯片。
RCC配置外部高速晶振(精度更高)——HSE;
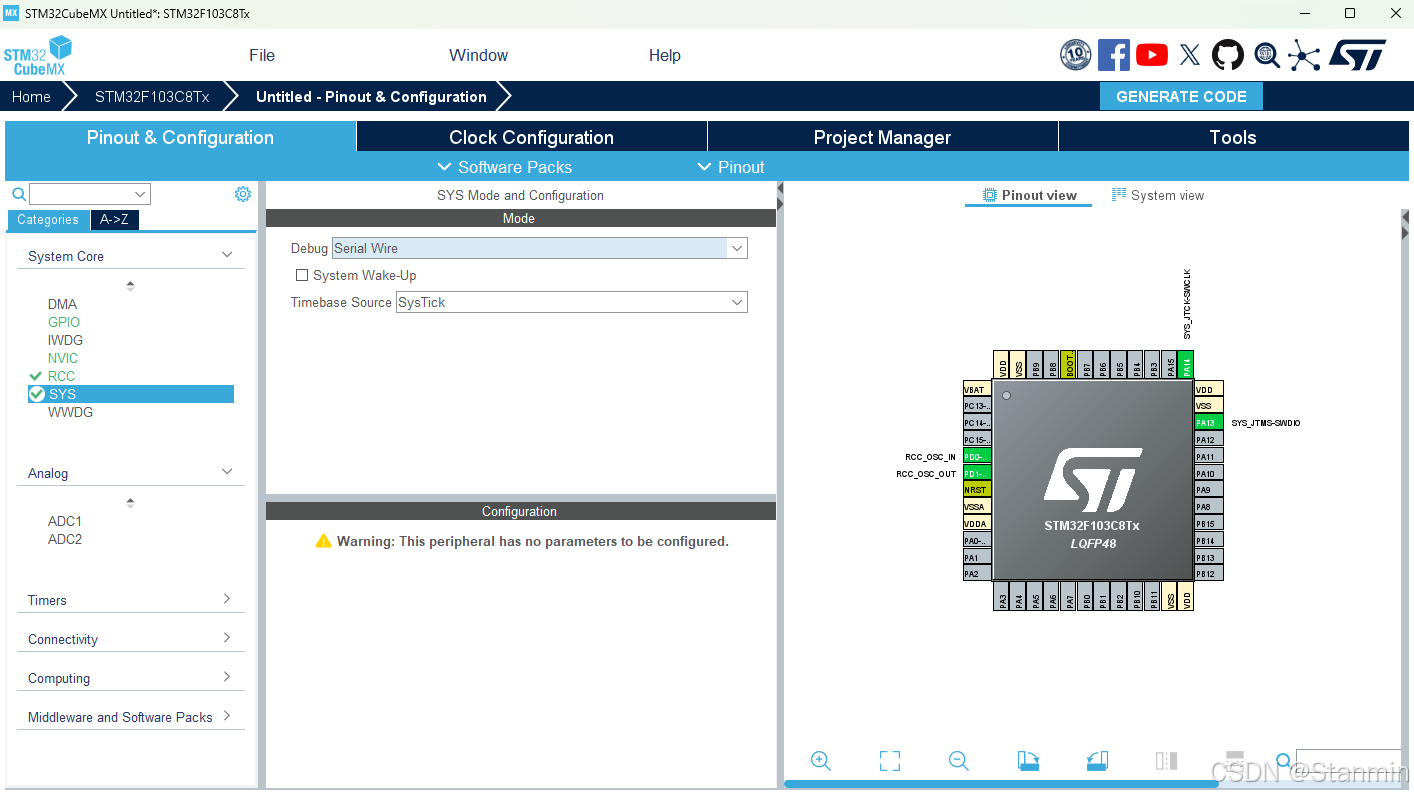
SYS配置:Debug设置成Serial Wire(否则可能导致芯片自锁)
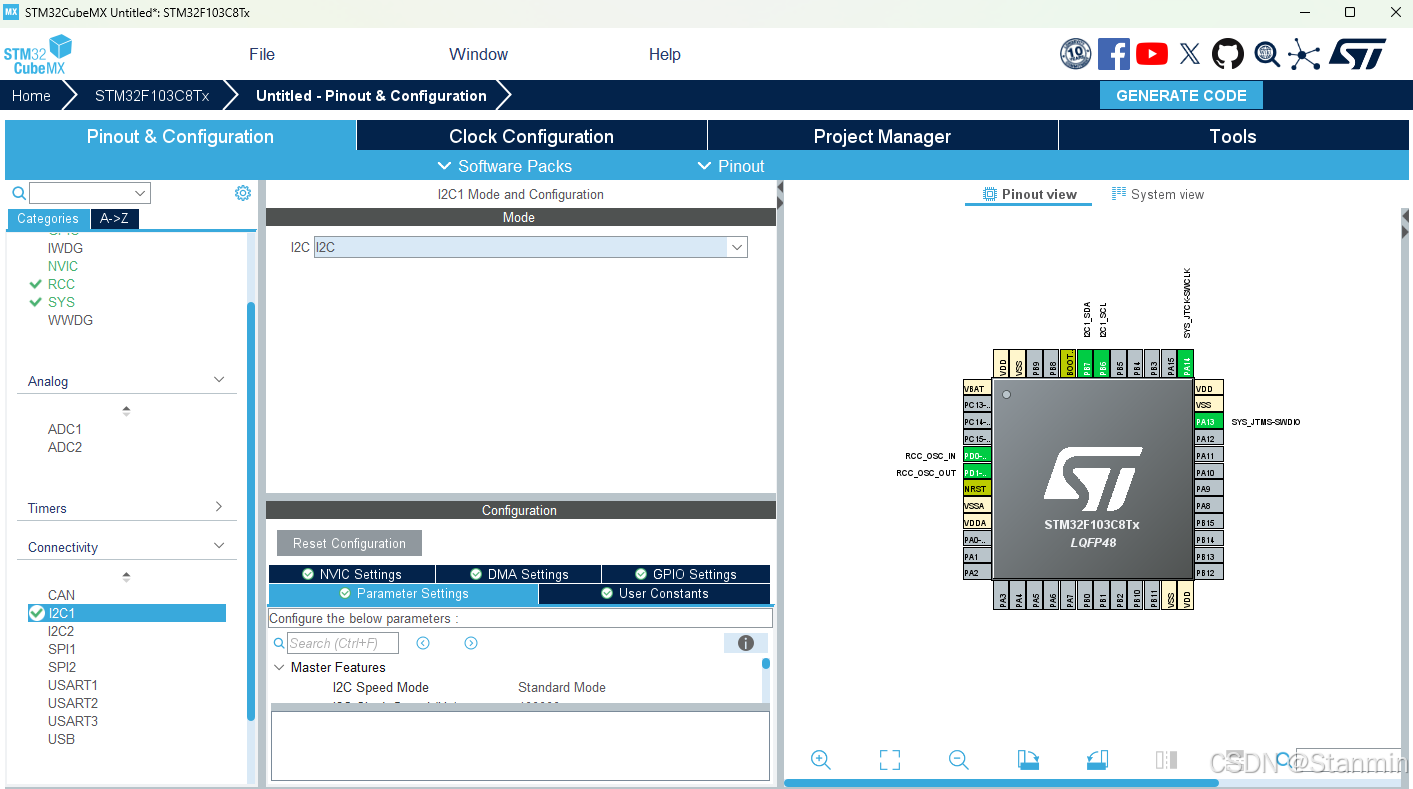
I2C2配置:作为OLED的通讯方式;
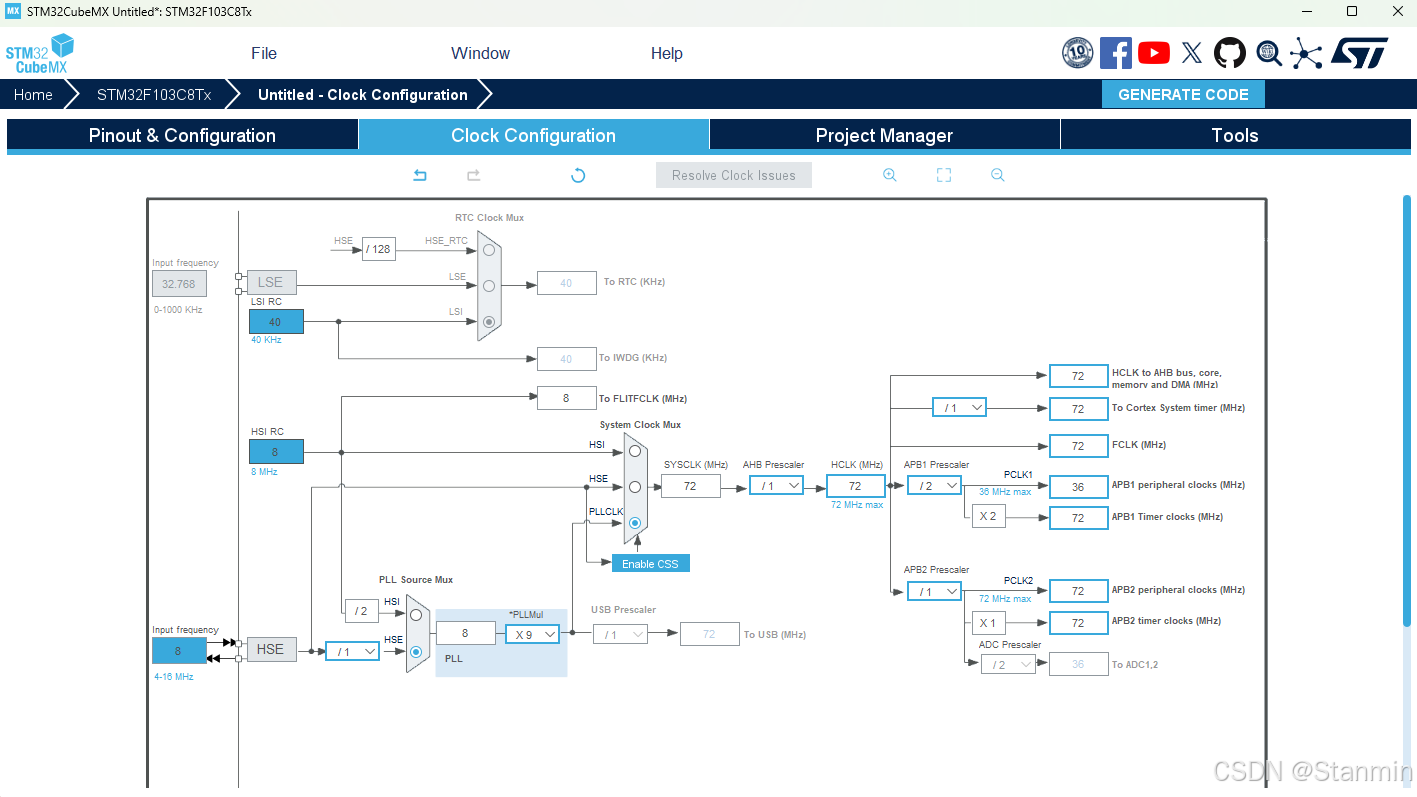
TIM1配置:U8g2图形库需要us级延迟推动(U8g2的心跳)
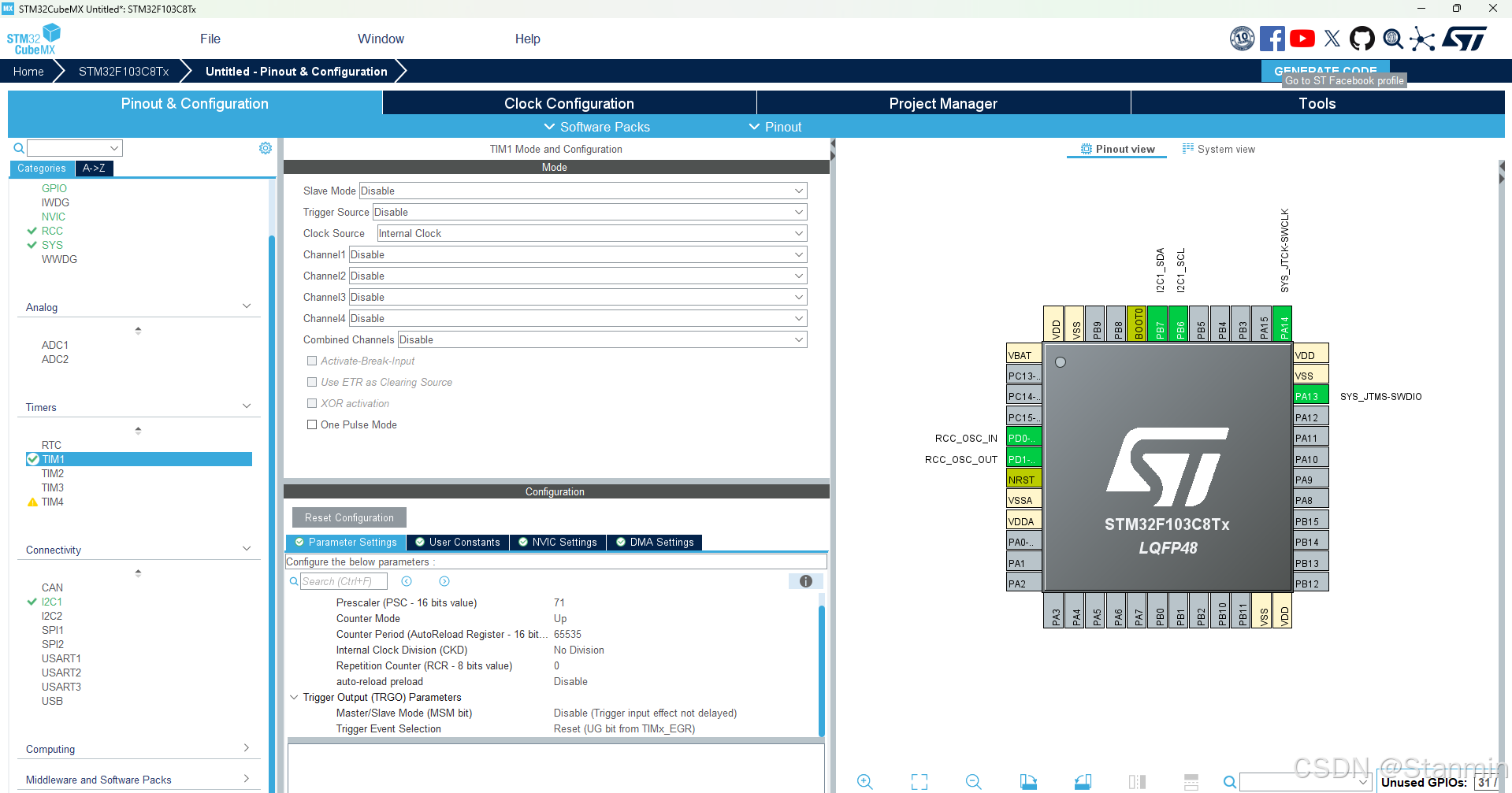
时钟树配置:
(2)u8g2库的移植
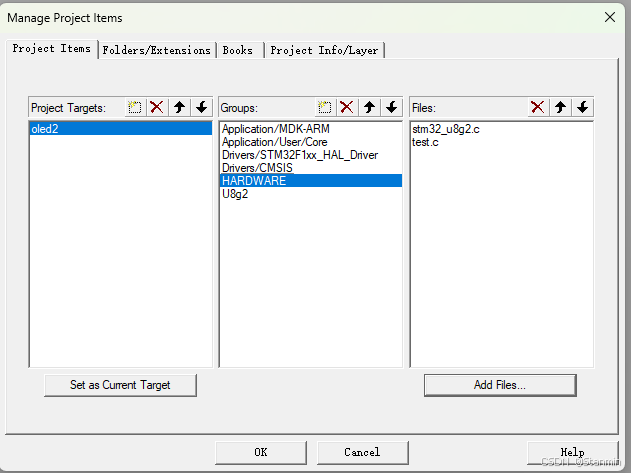
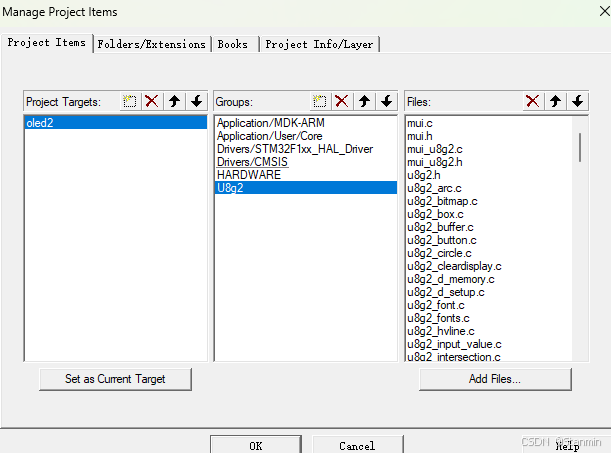
然后打开创建好的新工程,先下载u8g2库:https://github.com/olikraus/u8g2,然后在HAL的工程文件夹中新建两个文件(自己取名),我取的是HARDWARE和csrc,HARDWARE中添加stm32_u8g2.c、stm32_u8g2.h、test.c、test.h四个文件,然后从下载好的u8g2库中复制csrc文件的内容粘贴到新建的u8g2库中:
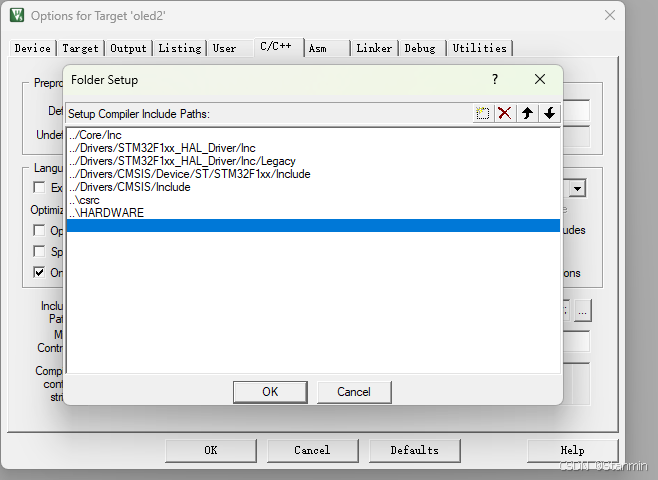
左侧Keil工程目录添加自己精简后U8g2库文件中的csrc文件,然后再添加U8g2的头文件搜寻目录(U8g2里面都是csrc文件里面的文件),接着点击魔术棒,找到C/C++,添加路径,如下图
a.stm32_u8g2.h:
#ifndef __STM32_U8G2_H
#define __STM32_U8G2_H
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "u8g2.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
#define u8 unsigned char // ?unsigned char ????
#define MAX_LEN 128 //
#define OLED_ADDRESS 0x78 // oled
#define OLED_CMD 0x00 //
#define OLED_DATA 0x40 //
/* USER CODE BEGIN Prototypes */
uint8_t u8x8_byte_hw_i2c(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr);
uint8_t u8x8_gpio_and_delay(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr);
void u8g2Init(u8g2_t *u8g2);
void draw(u8g2_t *u8g2);
void testDrawPixelToFillScreen(u8g2_t *u8g2);
#endif
b.stm32_u8g2.c:
#include "stm32_u8g2.h"
#include "tim.h"
#include "i2c.h"
uint8_t u8x8_byte_hw_i2c(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr)
{
/* u8g2/u8x8 will never send more than 32 bytes between START_TRANSFER and END_TRANSFER */
static uint8_t buffer[128];
static uint8_t buf_idx;
uint8_t *data;
switch (msg)
{
case U8X8_MSG_BYTE_INIT:
{
/* add your custom code to init i2c subsystem */
MX_I2C2_Init(); //I2C初始化
}
break;
case U8X8_MSG_BYTE_START_TRANSFER:
{
buf_idx = 0;
}
break;
case U8X8_MSG_BYTE_SEND:
{
data = (uint8_t *)arg_ptr;
while (arg_int > 0)
{
buffer[buf_idx++] = *data;
data++;
arg_int--;
}
}
break;
case U8X8_MSG_BYTE_END_TRANSFER:
{
if (HAL_I2C_Master_Transmit(&hi2c2, OLED_ADDRESS, buffer, buf_idx, 1000) != HAL_OK)
return 0;
}
break;
case U8X8_MSG_BYTE_SET_DC:
break;
default:
return 0;
}
return 1;
}
uint8_t u8x8_gpio_and_delay(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr)
{
switch (msg)
{
case U8X8_MSG_DELAY_100NANO: // delay arg_int * 100 nano seconds
__NOP();
break;
case U8X8_MSG_DELAY_10MICRO: // delay arg_int * 10 micro seconds
for (uint16_t n = 0; n < 320; n++)
{
__NOP();
}
break;
case U8X8_MSG_DELAY_MILLI: // delay arg_int * 1 milli second
HAL_Delay(1);
break;
case U8X8_MSG_DELAY_I2C: // arg_int is the I2C speed in 100KHz, e.g. 4 = 400 KHz
Tims_delay_us(5);
break; // arg_int=1: delay by 5us, arg_int = 4: delay by 1.25us
case U8X8_MSG_GPIO_I2C_CLOCK: // arg_int=0: Output low at I2C clock pin
break; // arg_int=1: Input dir with pullup high for I2C clock pin
case U8X8_MSG_GPIO_I2C_DATA: // arg_int=0: Output low at I2C data pin
break; // arg_int=1: Input dir with pullup high for I2C data pin
case U8X8_MSG_GPIO_MENU_SELECT:
u8x8_SetGPIOResult(u8x8, /* get menu select pin state */ 0);
break;
case U8X8_MSG_GPIO_MENU_NEXT:
u8x8_SetGPIOResult(u8x8, /* get menu next pin state */ 0);
break;
case U8X8_MSG_GPIO_MENU_PREV:
u8x8_SetGPIOResult(u8x8, /* get menu prev pin state */ 0);
break;
case U8X8_MSG_GPIO_MENU_HOME:
u8x8_SetGPIOResult(u8x8, /* get menu home pin state */ 0);
break;
default:
u8x8_SetGPIOResult(u8x8, 1); // default return value
break;
}
return 1;
}
//U8g2的初始化,需要调用下面这个u8g2_Setup_ssd1306_128x64_noname_f函数,该函数的4个参数含义:
//u8g2:传入的U8g2结构体
//U8G2_R0:默认使用U8G2_R0即可(用于配置屏幕是否要旋转)
//u8x8_byte_sw_i2c:使用软件IIC驱动,该函数由U8g2源码提供
//u8x8_gpio_and_delay:就是上面我们写的配置函数
void u8g2Init(u8g2_t *u8g2)
{
u8g2_Setup_ssd1306_i2c_128x64_noname_f(u8g2, U8G2_R0, u8x8_byte_hw_i2c, u8x8_gpio_and_delay); // 初始化u8g2 结构体
u8g2_InitDisplay(u8g2); //
u8g2_SetPowerSave(u8g2, 0); //
u8g2_ClearBuffer(u8g2);
}
void draw(u8g2_t *u8g2)
{
u8g2_ClearBuffer(u8g2);
u8g2_SetFontMode(u8g2, 1); /*字体模式选择*/
u8g2_SetFontDirection(u8g2, 0); /*字体方向选择*/
u8g2_SetFont(u8g2, u8g2_font_inb24_mf); /*字库选择*/
u8g2_DrawStr(u8g2, 0, 20, "U");
u8g2_SetFontDirection(u8g2, 1);
u8g2_SetFont(u8g2, u8g2_font_inb30_mn);
u8g2_DrawStr(u8g2, 21,8,"8");
u8g2_SetFontDirection(u8g2, 0);
u8g2_SetFont(u8g2, u8g2_font_inb24_mf);
u8g2_DrawStr(u8g2, 51,30,"g");
u8g2_DrawStr(u8g2, 67,30,"\xb2");
u8g2_DrawHLine(u8g2, 2, 35, 47);
u8g2_DrawHLine(u8g2, 3, 36, 47);
u8g2_DrawVLine(u8g2, 45, 32, 12);
u8g2_DrawVLine(u8g2, 46, 33, 12);
u8g2_SetFont(u8g2, u8g2_font_4x6_tr);
u8g2_DrawStr(u8g2, 1,54,"github.com/olikraus/u8g2");
u8g2_SendBuffer(u8g2);
HAL_Delay(1000);
}
//画点填充
void testDrawPixelToFillScreen(u8g2_t *u8g2)
{
int t = 1000;
u8g2_ClearBuffer(u8g2);
for (int j = 0; j < 64; j++)
{
for (int i = 0; i < 128; i++)
{
u8g2_DrawPixel(u8g2,i, j);
}
}
HAL_Delay(1000);
}
c.test.h:
#ifndef __TEST_H
#define __TEST_H
#include "main.h"
#include "u8g2.h"
void testDrawProcess(u8g2_t *u8g2);
void testShowFont(u8g2_t *u8g2);
void testDrawFrame(u8g2_t *u8g2);
void testDrawRBox(u8g2_t *u8g2);
void testDrawCircle(u8g2_t *u8g2);
void testDrawFilledEllipse(u8g2_t *u8g2);
void testDrawMulti(u8g2_t *u8g2);
void testDrawXBM(u8g2_t *u8g2);
void u8g2DrawTest(u8g2_t *u8g2);
#endif
d.test.c:
#include "test.h"
//---------------U8g2测试函数
#define SEND_BUFFER_DISPLAY_MS(u8g2, ms)\
do {\
u8g2_SendBuffer(u8g2); \
HAL_Delay(ms);\
}while(0);
//进度条显示
void testDrawProcess(u8g2_t *u8g2)
{
for(int i=10;i<=80;i=i+2)
{
u8g2_ClearBuffer(u8g2);
char buff[20];
sprintf(buff,"%d%%",(int)(i/80.0*100));
u8g2_SetFont(u8g2,u8g2_font_ncenB12_tf);
u8g2_DrawStr(u8g2,16,32,"STM32 U8g2");//字符显示
u8g2_SetFont(u8g2,u8g2_font_ncenB08_tf);
u8g2_DrawStr(u8g2,100,49,buff);//当前进度显示
u8g2_DrawRBox(u8g2,16,40,i,10,4);//圆角填充框矩形框
u8g2_DrawRFrame(u8g2,16,40,80,10,4);//圆角矩形
u8g2_SendBuffer(u8g2);
}
HAL_Delay(500);
}
//字体测试 数字英文可选用 u8g2_font_ncenB..(粗) 系列字体
//u8g2_font_unifont_t_symbols/u8g2_font_unifont_h_symbols(细 圆润)
void testShowFont(u8g2_t *u8g2)
{
int t = 1000;
char testStr[14] = "STM32F103C8T6";
u8g2_ClearBuffer(u8g2);
u8g2_SetFont(u8g2,u8g2_font_u8glib_4_tf);
u8g2_DrawStr(u8g2,0,5,testStr);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_SetFont(u8g2,u8g2_font_ncenB08_tf);
u8g2_DrawStr(u8g2,0,30,testStr);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_SetFont(u8g2,u8g2_font_ncenB10_tr);
u8g2_DrawStr(u8g2,0,60,testStr);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
//画空心矩形
void testDrawFrame(u8g2_t *u8g2)
{
int t = 1000;
int x = 16;
int y = 32;
int w = 50;
int h = 20;
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2,0, 15, "DrawFrame");
u8g2_DrawFrame(u8g2, x, y, w, h);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFrame(u8g2, x+w+5, y-10, w-20, h+20);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
//画实心圆角矩形
void testDrawRBox(u8g2_t *u8g2)
{
int t = 1000;
int x = 16;
int y = 32;
int w = 50;
int h = 20;
int r = 3;
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2,0, 15, "DrawRBox");
u8g2_DrawRBox(u8g2, x, y, w, h, r);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawRBox(u8g2, x+w+5, y-10, w-20, h+20, r);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
//画空心圆
void testDrawCircle(u8g2_t *u8g2)
{
int t = 600;
int stx = 0; //画图起始x
int sty = 16; //画图起始y
int with = 16;//一个图块的间隔
int r = 15; //圆的半径
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2, 0, 15, "DrawCircle");
u8g2_DrawCircle(u8g2, stx, sty - 1 + with, r, U8G2_DRAW_UPPER_RIGHT); //右上
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawCircle(u8g2, stx + with, sty, r, U8G2_DRAW_LOWER_RIGHT); //右下
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawCircle(u8g2, stx - 1 + with * 3, sty - 1 + with, r, U8G2_DRAW_UPPER_LEFT); //左上
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawCircle(u8g2, stx - 1 + with * 4, sty, r, U8G2_DRAW_LOWER_LEFT); //左下
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawCircle(u8g2, stx - 1 + with * 2, sty - 1 + with * 2, r, U8G2_DRAW_ALL);//整个圆
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawCircle(u8g2, 32*3, 32, 31, U8G2_DRAW_ALL);//右侧整个圆
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
//画实心椭圆
void testDrawFilledEllipse(u8g2_t *u8g2)
{
int t = 800;
int with = 16;//一个图块的间隔
int rx = 27; //椭圆x方向的半径
int ry = 22; //椭圆y方向的半径
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2,0, 14, "DrawFilledEllipse");
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFilledEllipse(u8g2, 0, with, rx, ry, U8G2_DRAW_LOWER_RIGHT);//右下
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFilledEllipse(u8g2, with * 4 - 1, with, rx, ry, U8G2_DRAW_LOWER_LEFT); //左下
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFilledEllipse(u8g2, 0, with * 4 - 1, rx, ry, U8G2_DRAW_UPPER_RIGHT); //右上
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFilledEllipse(u8g2, with * 4 - 1, with * 4 - 1, rx, ry, U8G2_DRAW_UPPER_LEFT); //左上
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_DrawFilledEllipse(u8g2, with * 6, with * 2.5, rx, ry, U8G2_DRAW_ALL);//整个椭圆
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
//环形测试
void testDrawMulti(u8g2_t *u8g2)
{
u8g2_ClearBuffer(u8g2);
for (int j = 0; j < 64; j+=16)
{
for (int i = 0; i < 128; i+=16)
{
u8g2_DrawPixel(u8g2, i, j);
u8g2_SendBuffer(u8g2);
}
}
//实心矩形逐渐变大
u8g2_ClearBuffer(u8g2);
for(int i=30; i>0; i-=2)
{
u8g2_DrawBox(u8g2,i*2,i,128-i*4,64-2*i);
u8g2_SendBuffer(u8g2);
}
//空心矩形逐渐变小
u8g2_ClearBuffer(u8g2);
for(int i=0; i<32; i+=2)
{
u8g2_DrawFrame(u8g2,i*2,i,128-i*4,64-2*i);
u8g2_SendBuffer(u8g2);
}
//实心圆角矩形逐渐变大
u8g2_ClearBuffer(u8g2);
for(int i=30; i>0; i-=2)
{
u8g2_DrawRBox(u8g2,i*2,i,128-i*4,64-2*i,10-i/3);
u8g2_SendBuffer(u8g2);
}
//空心圆角矩形逐渐变小
u8g2_ClearBuffer(u8g2);
for(int i=0; i<32; i+=2)
{
u8g2_DrawRFrame(u8g2,i*2,i,128-i*4,64-2*i,10-i/3);
u8g2_SendBuffer(u8g2);
}
//实心圆逐渐变大
u8g2_ClearBuffer(u8g2);
for(int i=2; i<64; i+=3)
{
u8g2_DrawDisc(u8g2,64,32,i, U8G2_DRAW_ALL);
u8g2_SendBuffer(u8g2);
}
//空心圆逐渐变小
u8g2_ClearBuffer(u8g2);
for(int i=64; i>0; i-=3)
{
u8g2_DrawCircle(u8g2,64,32,i, U8G2_DRAW_ALL);
u8g2_SendBuffer(u8g2);
}
//实心椭圆逐渐变大
u8g2_ClearBuffer(u8g2);
for(int i=2; i<32; i+=3)
{
u8g2_DrawFilledEllipse(u8g2,64,32, i*2, i, U8G2_DRAW_ALL);
u8g2_SendBuffer(u8g2);
}
//空心椭圆逐渐变小
u8g2_ClearBuffer(u8g2);
for(int i=32; i>0; i-=3)
{
u8g2_DrawEllipse(u8g2,64,32, i*2, i, U8G2_DRAW_ALL);
u8g2_SendBuffer(u8g2);
}
}
// width: 128, height: 48
const unsigned char bilibili[] U8X8_PROGMEM = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0x80, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0f, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1e, 0xe0, 0x03, 0x00, 0xe0, 0x00, 0x00, 0x00, 0x00, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3c, 0xf0, 0x00, 0x00, 0xf8, 0x00, 0x00, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x00, 0xfc, 0xff, 0xff, 0xff, 0x01, 0xfc, 0x00, 0x00, 0x00, 0xc0, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x00, 0xff, 0xff, 0xff, 0xff, 0x03, 0xfc, 0x00, 0x00, 0x3c, 0xc0, 0x0f, 0x00, 0x80, 0x03, 0x00, 0x80, 0xff, 0xff, 0xff, 0xff, 0x07, 0xfc, 0x00, 0x00, 0x3c, 0xc0, 0x0f, 0x00, 0xc0, 0x07, 0x00, 0x80, 0xff, 0xff, 0xff, 0xff, 0x0f, 0xfc, 0x00, 0x00, 0x3c, 0x80, 0x0f, 0x00, 0xc0, 0x07, 0x00, 0xc0, 0x0f, 0x00, 0x00, 0x80, 0x0f, 0xf8, 0x00, 0x00, 0x3c, 0x80, 0x0f, 0x00, 0x80, 0x07, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf8, 0x00, 0x00, 0x78, 0x80, 0x0f, 0x00, 0x80, 0x07, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf8, 0x00, 0x00, 0x78, 0x80, 0x0f, 0x00, 0x80, 0x07, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf8, 0x00, 0x80, 0x79, 0x80, 0x0f, 0x00, 0x98, 0x07, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf8, 0x00, 0xe0, 0x79, 0x9f, 0x0f, 0x00, 0xbe, 0xe7, 0x01, 0xc0, 0x07, 0x10, 0x40, 0x00, 0x1f, 0xf8, 0x00, 0xe0, 0x7b, 0x1f, 0x0f, 0x00, 0xbe, 0xe7, 0x01, 0xc0, 0x87, 0x1f, 0xe0, 0x0f, 0x1f, 0xf8, 0x00, 0xe0, 0x7b, 0x1e, 0x0f, 0x00, 0x3e, 0xe7, 0x01, 0xc0, 0xe7, 0x3f, 0xe0, 0x3f, 0x1f, 0xf0, 0x00, 0xe0, 0x7b, 0x1e, 0x0f, 0x00, 0x3e, 0xe7, 0x01, 0xc0, 0xe7, 0x3f, 0xe0, 0x3f, 0x1f, 0xf0, 0x00, 0x60, 0x71, 0x1e, 0x0f, 0x00, 0x34, 0xe7, 0x01, 0xc0, 0xe7, 0x07, 0x00, 0x3f, 0x1f, 0xf0, 0x00, 0x00, 0x70, 0x00, 0x1f, 0x00, 0x00, 0x07, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf0, 0x00, 0xc0, 0x73, 0x1e, 0x1f, 0x00, 0x3c, 0xc7, 0x01, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf0, 0x00, 0xc0, 0x73, 0x1e, 0x1f, 0x00, 0x7c, 0xe7, 0x01, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf0, 0x00, 0xc0, 0x73, 0x1e, 0x1f, 0x00, 0x7c, 0xef, 0x01, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xf0, 0x01, 0xc0, 0x77, 0x1e, 0x1e, 0x00, 0x7c, 0xef, 0x01, 0xc0, 0x07, 0x00, 0x03, 0x00, 0x1f, 0xf0, 0xff, 0xc1, 0xf7, 0x1e, 0xfe, 0x1f, 0x78, 0xef, 0x01, 0xc0, 0x07, 0x70, 0x37, 0x00, 0x1f, 0xe0, 0xff, 0x87, 0xf7, 0x1e, 0xfe, 0xff, 0x78, 0xee, 0x01, 0xc0, 0x07, 0xe0, 0x3f, 0x00, 0x1f, 0xe0, 0xff, 0x9f, 0xf7, 0x1e, 0xfe, 0xff, 0x79, 0xce, 0x01, 0xc0, 0x07, 0xc0, 0x18, 0x00, 0x1f, 0xe0, 0xff, 0xbf, 0xe7, 0x1e, 0xfe, 0xff, 0x7b, 0xce, 0x01, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xe0, 0xc7, 0xbf, 0xe7, 0x1e, 0xfe, 0xf8, 0x77, 0xce, 0x01, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xe0, 0x0f, 0x3f, 0xe7, 0x1c, 0xfe, 0xf0, 0x77, 0xce, 0x03, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x1f, 0xe0, 0xcf, 0x3f, 0xe7, 0x1c, 0xfe, 0xf8, 0xf3, 0xce, 0x03, 0xc0, 0xff, 0xff, 0xff, 0xff, 0x0f, 0xe0, 0xef, 0x1f, 0xe7, 0x1c, 0xfe, 0xfe, 0xf1, 0xce, 0x03, 0x80, 0xff, 0xff, 0xff, 0xff, 0x0f, 0xe0, 0xff, 0x0f, 0xcf, 0x1c, 0xfc, 0xff, 0xf0, 0xc0, 0x03, 0x00, 0xff, 0xff, 0xff, 0xff, 0x07, 0xe0, 0xff, 0x03, 0x06, 0x1c, 0xfc, 0x7f, 0x60, 0xc0, 0x01, 0x00, 0xfe, 0xff, 0xff, 0xff, 0x03, 0xe0, 0xff, 0x00, 0x00, 0x00, 0xfc, 0x0f, 0x00, 0x00, 0x00, 0x00, 0xfc, 0xff, 0xff, 0xff, 0x00, 0xc0, 0x0f, 0x00, 0x00, 0x00, 0xfc, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x03, 0x00, 0x1e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x01, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
// width: 128, height: 48
const unsigned char three_support[] U8X8_PROGMEM = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x00, 0x00, 0x00, 0xe0, 0x07, 0x00, 0x00, 0x00, 0x00, 0x07, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x03, 0x00, 0x00, 0x00, 0xfc, 0x1f, 0x00, 0x00, 0x00, 0x00, 0x0f, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x03, 0x00, 0x00, 0x00, 0xfe, 0x7f, 0x00, 0x00, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x03, 0x00, 0x00, 0x00, 0xff, 0xff, 0x00, 0x00, 0x00, 0x80, 0x1f, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x03, 0x00, 0x00, 0x80, 0x0f, 0xf0, 0x00, 0x00, 0x00, 0xc0, 0x3f, 0x00, 0x00, 0x00, 0x00, 0xf8, 0x03, 0x00, 0x00, 0x80, 0x0f, 0xf0, 0x01, 0x00, 0x00, 0xfc, 0xff, 0x01, 0x00, 0x00, 0xc0, 0xfd, 0xff, 0x00, 0x00, 0xc0, 0x7f, 0xfe, 0x01, 0x00, 0x00, 0xff, 0xff, 0x0f, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x01, 0x00, 0xc0, 0x1f, 0xf8, 0x03, 0x00, 0x00, 0xff, 0xff, 0x0f, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x01, 0x00, 0xc0, 0x0f, 0xf0, 0x03, 0x00, 0x00, 0xfe, 0xff, 0x07, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x01, 0x00, 0xc0, 0x67, 0xe6, 0x03, 0x00, 0x00, 0xfc, 0xff, 0x03, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x01, 0x00, 0xc0, 0x67, 0xe6, 0x03, 0x00, 0x00, 0xf8, 0xff, 0x01, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x00, 0x00, 0xc0, 0x67, 0xe6, 0x03, 0x00, 0x00, 0xf0, 0x7f, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x00, 0x00, 0xc0, 0x67, 0xee, 0x03, 0x00, 0x00, 0xe0, 0x7f, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x00, 0x00, 0x80, 0x7f, 0xfe, 0x01, 0x00, 0x00, 0xe0, 0xff, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0xff, 0x00, 0x00, 0x80, 0x7f, 0xfe, 0x01, 0x00, 0x00, 0xf0, 0xff, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0x7f, 0x00, 0x00, 0x00, 0xff, 0xff, 0x00, 0x00, 0x00, 0xf0, 0xff, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0x7f, 0x00, 0x00, 0x00, 0xfe, 0xff, 0x00, 0x00, 0x00, 0xf8, 0xf9, 0x01, 0x00, 0x00, 0xe0, 0xfd, 0x7f, 0x00, 0x00, 0x00, 0xfe, 0x7f, 0x00, 0x00, 0x00, 0xf8, 0xf0, 0x00, 0x00, 0x00, 0xe0, 0xfd, 0x1f, 0x00, 0x00, 0x00, 0xf8, 0x1f, 0x00, 0x00, 0x00, 0x30, 0xc0, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
void testDrawXBM(u8g2_t *u8g2)
{
int t = 1000;
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2,0, 14, "DrawXBM");
u8g2_DrawXBM(u8g2,0, 16, 128, 48, bilibili);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
u8g2_ClearBuffer(u8g2);
u8g2_DrawStr(u8g2,0, 14, "bilibili");
u8g2_DrawXBM(u8g2,0, 16, 128, 48, three_support);
SEND_BUFFER_DISPLAY_MS(u8g2,t);
}
void u8g2DrawTest(u8g2_t *u8g2)
{
testDrawProcess(u8g2);
testDrawMulti(u8g2);
//testDrawFrame(u8g2);
//testDrawRBox(u8g2);
//testDrawCircle(u8g2);
//testDrawFilledEllipse(u8g2);
testShowFont(u8g2);
testDrawXBM(u8g2);
}
d.main.c:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C2_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
u8g2_t u8g2;
u8g2Init(&u8g2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
u8g2_FirstPage(&u8g2);
do
{
draw(&u8g2);
u8g2DrawTest(&u8g2);
} while (u8g2_NextPage(&u8g2));
}
/* USER CODE END 3 */
}
2.进阶版——滚动显示长字符
完成上述的代码移植后,就可在此基础上实现滚动显示长字符,具体步骤如下(以下代码均在main.c中完成):
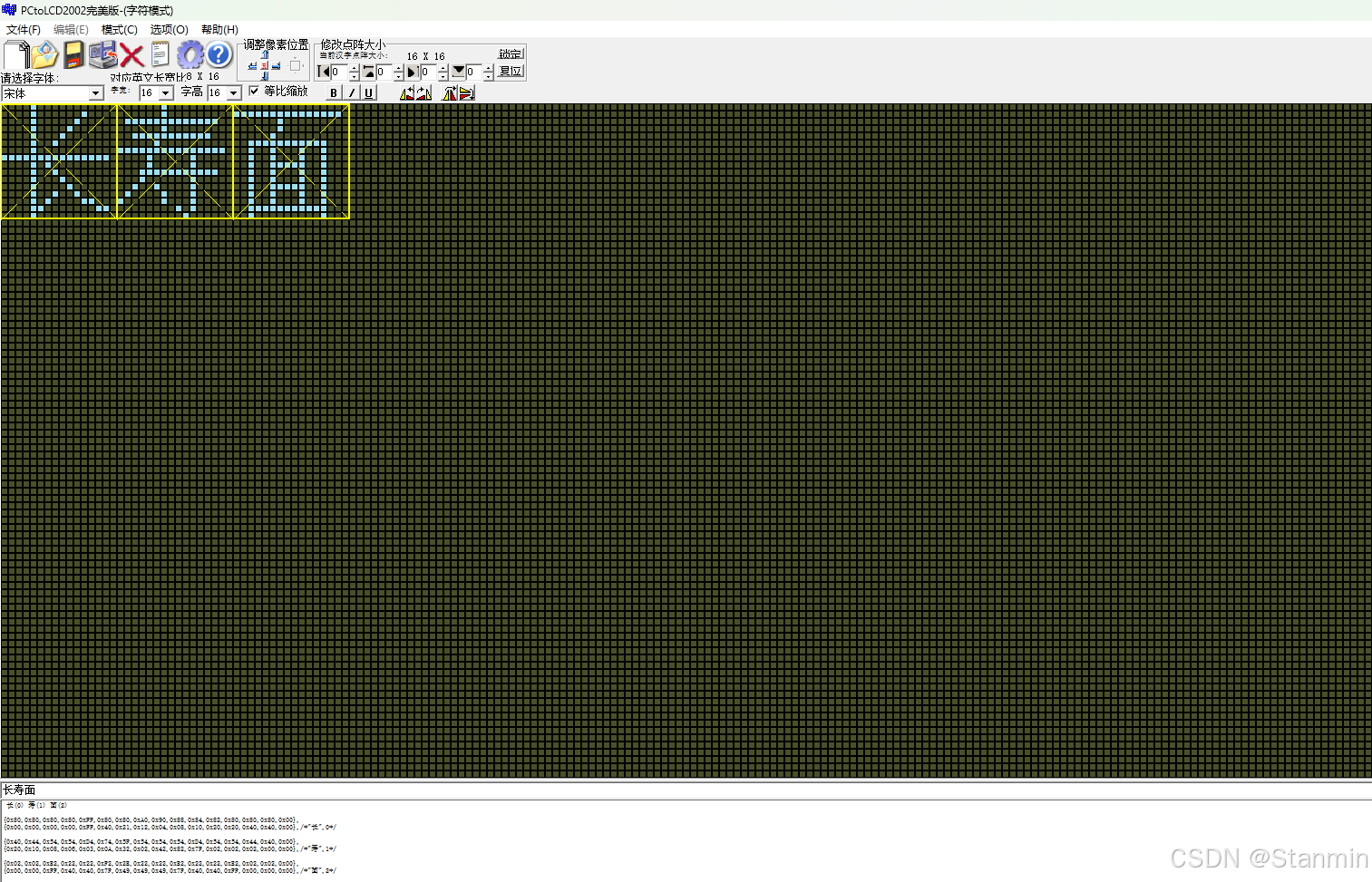
先打开PCtoLCD2002,选择模式 - 字符模式,点击选项,进行设置,具体设置如下:
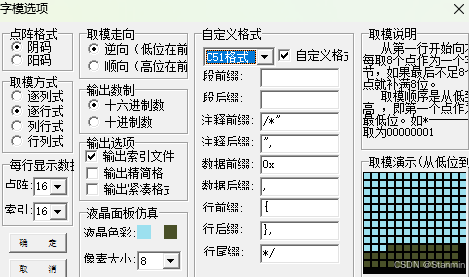
在输入栏输入需要取模的汉字(只能是汉字),然后点击生成字模。我选取了当时明月在这句诗词:
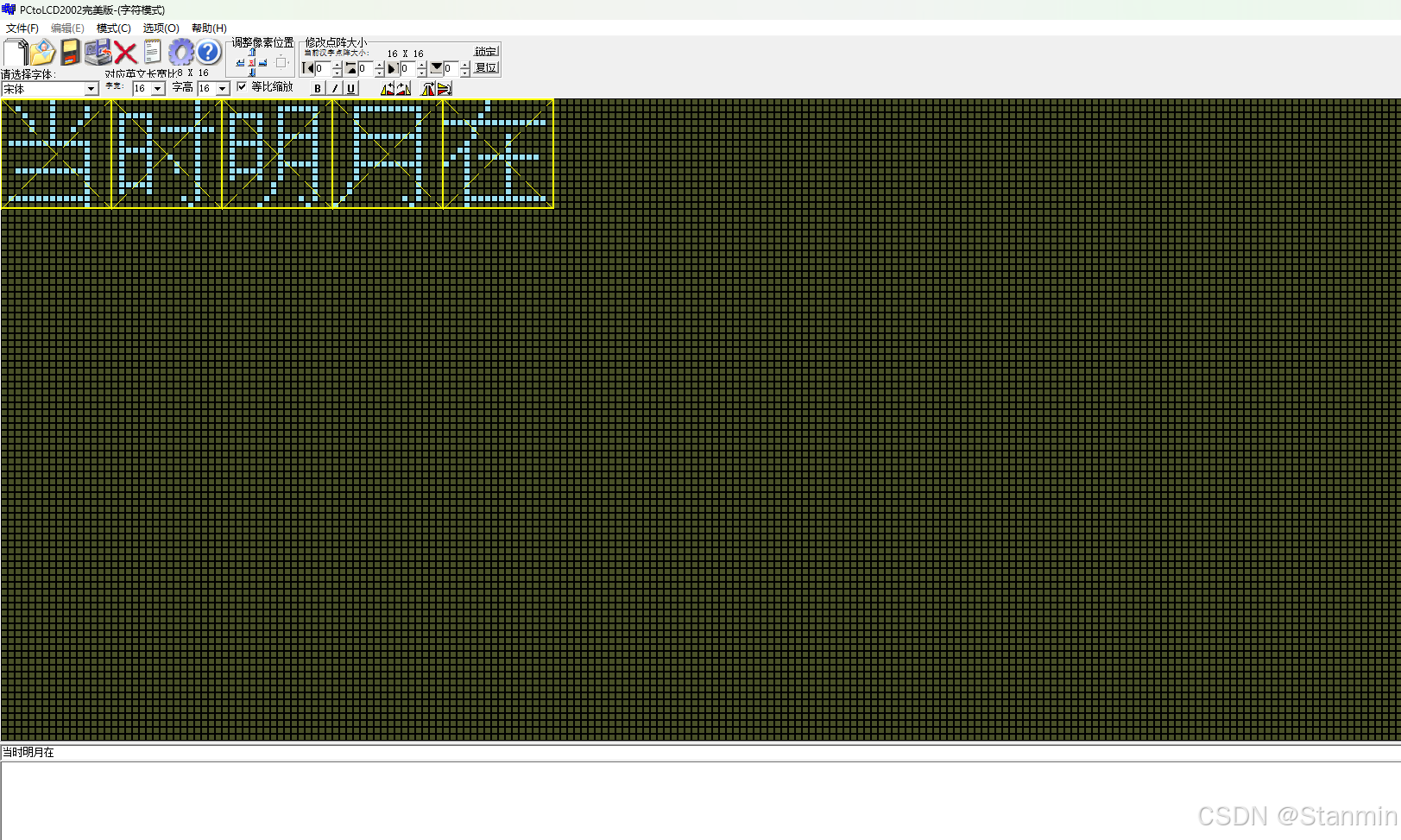
当(0) 时(1) 明(2) 月(3) 在(4)
{0x80,0x00,0x84,0x10,0x88,0x10,0x90,0x08,0x90,0x04,0x80,0x00,0xFE,0x1F,0x00,0x10},
{0x00,0x10,0x00,0x10,0xFC,0x1F,0x00,0x10,0x00,0x10,0x00,0x10,0xFE,0x1F,0x00,0x10},/“当”,0/
/* (16 X 16 , 宋体 )*/
{0x00,0x10,0x00,0x10,0x3E,0x10,0x22,0x10,0xA2,0x7F,0x22,0x10,0x22,0x10,0x3E,0x10},
{0x22,0x11,0x22,0x12,0x22,0x12,0x22,0x10,0x3E,0x10,0x22,0x10,0x00,0x14,0x00,0x08},/“时”,1/
/* (16 X 16 , 宋体 )*/
{0x00,0x00,0x00,0x3F,0x3E,0x21,0x22,0x21,0x22,0x21,0x22,0x3F,0x3E,0x21,0x22,0x21},
{0x22,0x21,0x22,0x3F,0x3E,0x21,0x22,0x21,0x80,0x20,0x80,0x20,0x40,0x28,0x20,0x10},/“明”,2/
/* (16 X 16 , 宋体 )*/
{0x00,0x00,0xF8,0x1F,0x08,0x10,0x08,0x10,0x08,0x10,0xF8,0x1F,0x08,0x10,0x08,0x10},
{0x08,0x10,0xF8,0x1F,0x08,0x10,0x08,0x10,0x04,0x10,0x04,0x10,0x02,0x14,0x01,0x08},/“月”,3/
/* (16 X 16 , 宋体 )*/
{0x40,0x00,0x40,0x00,0x20,0x00,0xFF,0x7F,0x10,0x00,0x10,0x02,0x08,0x02,0x0C,0x02},
{0xEA,0x3F,0x09,0x02,0x08,0x02,0x08,0x02,0x08,0x02,0x08,0x02,0xF8,0x7F,0x08,0x00},/“在”,4/
/* (16 X 16 , 宋体 )*/
由于oled屏幕是128*64规格的,所以x坐标在(0,128)之间,为了实现滑动(以右滑动为例子)中定义横坐标x为变量,通过改变x的值从而实现滑动,向其它方位滑动同理,相关代码如下:
unsigned int x=16;
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(x<=128)
{
x++;//????,??????x???????????
}
else if(x>128)//??
{
x=0;
}
u8g2_SetFont(&u8g2,u8g2_font_ncenB12_tf);//??????
u8g2_DrawXBMP(&u8g2,x,0,16,16,dang);
u8g2_DrawXBMP(&u8g2,x+16,0,16,16,shi);
u8g2_DrawXBMP(&u8g2,x+32,0,16,16,ming);
u8g2_DrawXBMP(&u8g2,x+48,0,16,16,yue);
u8g2_DrawXBMP(&u8g2,x+64,0,16,16,zai);
u8g2_SendBuffer(&u8g2);
}
/* USER CODE END 3 */
完整main.c如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stm32_u8g2.h"
#include "test.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
/*µ±*/
static const unsigned char dang[] ={
0x80,0x00,0x84,0x10,0x88,0x10,0x90,0x08,0x90,0x04,0x80,0x00,0xFE,0x1F,0x00,0x10,0x00,0x10,0x00,0x10,0xFC,0x1F,0x00,0x10,0x00,0x10,0x00,0x10,0xFE,0x1F,0x00,0x10};
/*ʱ*/
static const unsigned char shi[] ={
0x00,0x10,0x00,0x10,0x3E,0x10,0x22,0x10,0xA2,0x7F,0x22,0x10,0x22,0x10,0x3E,0x10,0x22,0x11,0x22,0x12,0x22,0x12,0x22,0x10,0x3E,0x10,0x22,0x10,0x00,0x14,0x00,0x08};
/*Ã÷*/
static const unsigned char ming[] ={
0x00,0x00,0x00,0x3F,0x3E,0x21,0x22,0x21,0x22,0x21,0x22,0x3F,0x3E,0x21,0x22,0x21,0x22,0x21,0x22,0x3F,0x3E,0x21,0x22,0x21,0x80,0x20,0x80,0x20,0x40,0x28,0x20,0x10};
/*ÔÂ*/
static const unsigned char yue[]={
0x00,0x00,0xF8,0x1F,0x08,0x10,0x08,0x10,0x08,0x10,0xF8,0x1F,0x08,0x10,0x08,0x10,0x08,0x10,0xF8,0x1F,0x08,0x10,0x08,0x10,0x04,0x10,0x04,0x10,0x02,0x14,0x01,0x08};
/*ÔÚ*/
static const unsigned char zai[]={
0x40,0x00,0x40,0x00,0x20,0x00,0xFF,0x7F,0x10,0x00,0x10,0x02,0x08,0x02,0x0C,0x02,0xEA,0x3F,0x09,0x02,0x08,0x02,0x08,0x02,0x08,0x02,0x08,0x02,0xF8,0x7F,0x08,0x00};
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C2_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
u8g2_t u8g2;
u8g2Init(&u8g2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
unsigned int x=16;
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(x<=128)
{
x++;//????,??????x???????????
}
else if(x>128)//??
{
x=0;
}
u8g2_SetFont(&u8g2,u8g2_font_ncenB12_tf);//??????
u8g2_DrawXBMP(&u8g2,x,0,16,16,dang);
u8g2_DrawXBMP(&u8g2,x+16,0,16,16,shi);
u8g2_DrawXBMP(&u8g2,x+32,0,16,16,ming);
u8g2_DrawXBMP(&u8g2,x+48,0,16,16,yue);
u8g2_DrawXBMP(&u8g2,x+64,0,16,16,zai);
u8g2_SendBuffer(&u8g2);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
3.滚动效果展示
gundong
六.SPI通信协议—AHT20+OLED显示温湿度
1.SPI通信协议
什么是SPI
SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
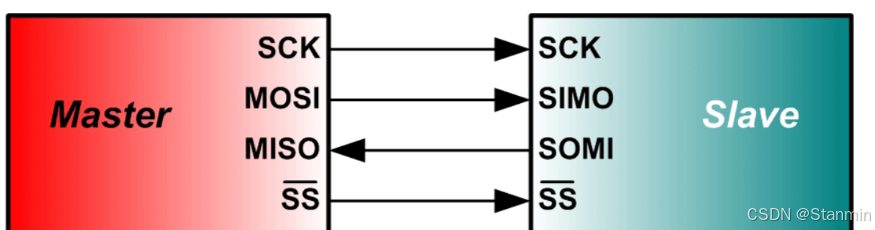
SPI主从模式
SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。
SPI是全双工且SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps
SPI信号线
SPI接口一般使用四条信号线通信:
SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)
MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
SCLK:串行时钟信号,由主设备产生。
CS/SS:从设备片选信号,由主设备控制。它的功能是用来作为“片选引脚”,也就是选择指定的从设备,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。
硬件上为4根线。
SPI一对一
SPI设备选择
SPI是[单主设备( single-master )]通信协议,这意味着总线中的只有一支中心设备能发起通信。当SPI主设备想读/写[从设备]时,它首先拉低[从设备]对应的SS线(SS是低电平有效),接着开始发送工作脉冲到时钟线上,在相应的脉冲时间上,[主设备]把信号发到MOSI实现“写”,同时可对MISO采样而实现“读”,如下图:
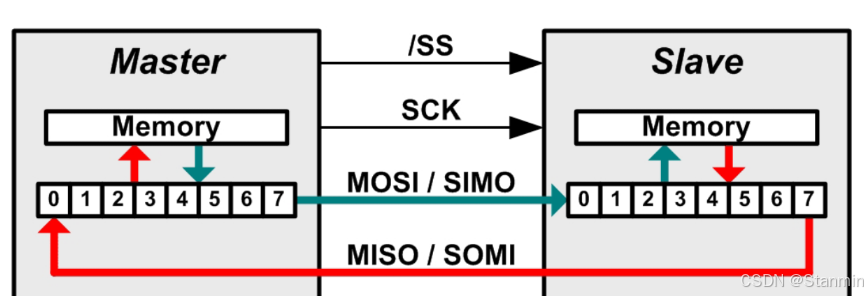
SPI数据发送接收
SPI主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。
首先拉低对应SS信号线,表示与该设备进行通信
主机通过发送SCLK时钟信号,来告诉从机写数据或者读数据
这里要注意,SCLK时钟信号可能是低电平有效,也可能是高电平有效,因为SPI有四种模式,这个我们在下面会介绍
主机(Master)将要发送的数据写到发送数据缓存区(Menory),缓存区经过移位寄存器(0~7),串行移位寄存器通过MOSI信号线将字节一位一位的移出去传送给从机,,同时MISO接口接收到的数据经过移位寄存器一位一位的移到接收缓存区。
从机(Slave)也将自己的串行移位寄存器(0~7)中的内容通过MISO信号线返回给主机。同时通过MOSI信号线接收主机发送的数据,这样,两个移位寄存器中的内容就被交换。
 SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。
SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。
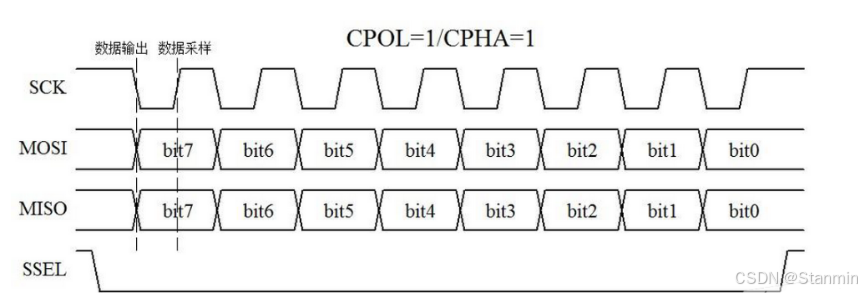
SPI通信的四种模式
SPI的四种模式,简单地讲就是设置SCLK时钟信号线的那种信号为有效信号
SPI通信有4种不同的操作模式,不同的从设备可能在出厂是就是配置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来
控制我们主设备的通信模式,具体如下:
、
时钟极性(CPOL)定义了时钟空闲状态电平:
CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
时钟相位(CPHA)定义数据的采集时间。
CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。,在第2个边沿发送数据
CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。,在第1个边沿发送数据
例如:
Mode0:CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
Mode1:CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
Mode2:CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
Mode3:CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
2.实现过程
温湿度传感器(.c、.h)代码
可以去奥松官网下载AHT20芯片代码与芯片的相关信息介绍文档:
http://www.aosong.com/class-36-2.html
官方代码使用的是PB14,PB15引脚,需要修改引脚为PB6,PB7 才可以正常使用。
我这里已将修改好:
MYI2C.c
/*******************************************/
/*@版权所有:广州奥松电子有限公司 */
/*@作者:温湿度传感器事业部 */
/*@版本:V1.2 */
/*******************************************/
//#include "main.h"
#include "MYI2C.h"
#include "gpio.h"
#include "i2c.h"
void Delay_N10us(uint32_t t)//延时函数
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//延时函数
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //延时函数
{
while(t--)
{
SensorDelay_us(1000);//延时1ms
}
}
//void AHT20_Clock_Init(void) //延时函数
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //将PB7配置为输出 , 并设置为高电平, PB7作为I2C的SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
void SDA_Pin_Output_Low(void) //将P7配置为输出 并设置为低电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//浮空
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void SCL_Pin_Output_Low(void) //SCL输出低电平
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
}
void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void I2C_Start(void) //I2C主机发送START信号
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
//if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1;
Byte = (Byte<<1)|a;
//SCL_Pin_Output_Low();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //看AHT20是否有回复ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //主机回复ACK信号
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //主机不回复ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //一条协议结束
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //查询cal enable位有没有使能
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //向AHT20发送AC命令
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC采集命令
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC校验类型:CRC8/MAXIM
//多项式:X8+X5+X4+1
//Poly:0011 0001 0x31
//高位放到后面就变成 1000 1100 0x8c
//C现实代码:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_6th = AHT20_RD_Byte();//温度
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//用于CRC传递数组
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC数据
Send_NOT_ACK(); //注意: 最后是发送NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
else
{
ct[0]=0x00;
ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改
}//CRC数据
}
void AHT20_Init(void) //初始化AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8进入NOR工作模式
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE初始化命令,AHT20的初始化命令是0xBE, AHT10的初始化命令是0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//相关寄存器bit[3]置1,为校准输出
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//原来是0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//延时5ms左右
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);//寄存器命令
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
MYI2C.h
#ifndef _AHT20_DEMO_
#define _AHT20_DEMO_
#include "main.h"
void Delay_N10us(uint32_t t);//延时函数
void SensorDelay_us(uint32_t t);//延时函数
void Delay_4us(void); //延时函数
void Delay_5us(void); //延时函数
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //延时函数
void SDA_Pin_Output_High(void) ; //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
void SDA_Pin_Output_Low(void); //将P15配置为输出 并设置为低电平
void SDA_Pin_IN_FLOATING(void); //SDA配置为浮空输入
void SCL_Pin_Output_High(void); //SCL输出高电平,P14作为I2C的SCL
void SCL_Pin_Output_Low(void); //SCL输出低电平
void Init_I2C_Sensor_Port(void); //初始化I2C接口,输出为高电平
void I2C_Start(void); //I2C主机发送START信号
void AHT20_WR_Byte(uint8_t Byte); //往AHT20写一个字节
uint8_t AHT20_RD_Byte(void);//从AHT20读取一个字节
uint8_t Receive_ACK(void); //看AHT20是否有回复ACK
void Send_ACK(void) ; //主机回复ACK信号
void Send_NOT_ACK(void); //主机不回复ACK
void Stop_I2C(void); //一条协议结束
uint8_t AHT20_Read_Status(void);//读取AHT20的状态寄存器
uint8_t AHT20_Read_Cal_Enable(void); //查询cal enable位有没有使能
void AHT20_SendAC(void); //向AHT20发送AC命令
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //没有CRC校验,直接读取AHT20的温度和湿度数据
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC校验后,读取AHT20的温度和湿度数据
void AHT20_Init(void); //初始化AHT20
void JH_Reset_REG(uint8_t addr);///重置寄存器
void AHT20_Start_Init(void);///上电初始化进入正常测量状态
#endif
3.效果展示
wendu2
七.总结
本次实验围绕 STM32F103 展开,主要包括学习 I2C 总线通信协议并完成基于此协议的 AHT20 温湿度传感器数据采集,以及理解 OLED 屏显和汉字点阵编码原理并实现相关功能。
首先学习 I2C 总线通信协议,其中软件 I2C 是利用软件模拟 I2C 总线的时序,通过通用 I/O 口模拟 SCL 和 SDA 的电平变化来产生起始位、停止位、数据位等信号,这种方式灵活性高但占用 CPU 资源较多。而硬件 I2C 是依靠 STM32F103 芯片内部集成的专门模块,能自动按协议时序进行数据传输,可减轻 CPU 负担并提高传输效率和可靠性,通过阅读野火配套教材相关章节深入理解了二者原理。在 AHT20 温湿度传感器数据采集方面,仔细研读其数据手册后,成功编程实现了每隔 2 秒采集一次温湿度数据。通过配置 STM32F103 的寄存器初始化 I2C 接口与传感器通信,按照协议发送指令获取数据,再利用串口将温度和湿度值发送到 win10 上位机,过程中严格把控 I2C 通信时序和串口参数以确保数据准确传输。
对于 OLED 屏显功能,在理解其原理和汉字点阵编码后,使用 STM32F103 的 SPI 或 IIC 接口进行操作。先是成功将自己的学号和姓名显示在屏幕上,根据学号姓名的汉字点阵数据转换格式并发送控制指令和数据来实现。接着把 AHT20 采集到的温度和湿度数据实时显示在 OLED 屏上,将数据转换为字符串后按显示规则在指定位置更新显示。还实现了长字符一段诗词的左右滑动显示,利用硬件刷屏模式,通过设置起始位置、偏移量和刷屏时间间隔等参数,使长字符能平滑滑动,这不仅提升了对 OLED 屏控制指令的掌握程度,也积累了字符处理和动画效果实现的经验。
通过本次实验,深入掌握了 STM32F103 在 I2C 通信、串口通信和 OLED 屏显方面的应用,极大地提升了嵌入式系统开发的实践能力,为今后进一步学习和项目开发奠定了坚实基础。

















 837
837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









