







 本文介绍了6DOF机械臂的逆解算法及其在MATLAB2022a中的仿真效果,探讨了机械臂作为复杂系统的特性,包括其结构类型和运动组件,并引用了相关研究文献作为参考。
本文介绍了6DOF机械臂的逆解算法及其在MATLAB2022a中的仿真效果,探讨了机械臂作为复杂系统的特性,包括其结构类型和运动组件,并引用了相关研究文献作为参考。
目录
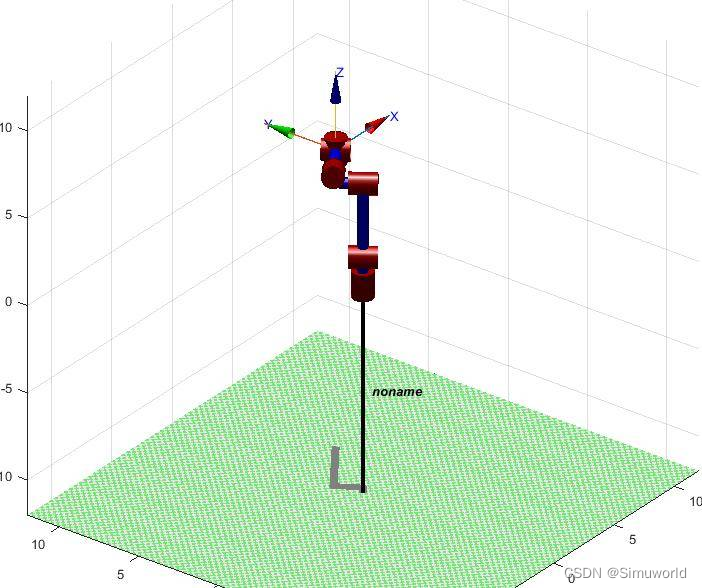
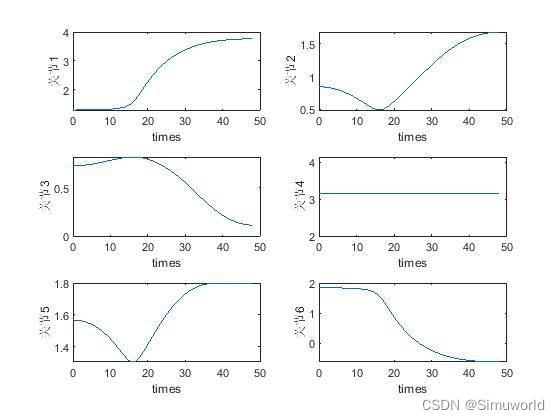
1.算法仿真效果
matlab2022a仿真结果如下:
2.MATLAB源码
%**********************************************************************************
%订阅用户如果对某一个算法感兴趣,可以私信留言文章链接和邮箱,分享任意一份完整代码,
%一般当天晚上或第二天下午4点前会将完整程序发到邮箱中。
%*********************************************************************************
l1=Link([ 0 1.5 0 pi/2]);
l2=Link([0 0 4 0]);
l3=Link([-pi/2 
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 546
546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











