




永磁同步电机PI控制与内模控制对比
引言
- 永磁同步电机(PMSM)在工业与新能源领域的应用背景
- 控制策略对电机性能的影响
- PI控制与内模控制(IMC)的基本概念及研究意义
最近接触了一下关于永磁同步电机的内模控制,网上的资料并不多,可能大佬们不屑于写这么基础的东西,以下记录自己的心路历程
首先简单来说 内模控制就是把电机模型直接取逆,再乘以一个自己希望的一阶传递函数,以把目标控制成该一阶传递函数的效果。听起来有些绕,下面展开说明
永磁同步电机数学模型
首先是老生常谈的电压方程和转矩方程
- PMSM的dq轴数学模型
- 电压方程
Ud=Rs∗id+Ld∗diddt−weLqiq U_d=R_s*i_d+L_d*\frac{di_d}{dt}-w_eL_qi_q Ud=Rs∗id+Ld∗dtdid−weLqiq
Uq=Rs∗iq+Lq∗diqdt+weLdid+weΦf U_q=R_s*i_q+L_q*\frac{di_q}{dt}+w_eL_di_d+w_e\Phi_f Uq=Rs∗iq+Lq∗dtdiq+weLdid+weΦf - 转矩方程
Te=1.5Np[Φfiq+(Ld−Lq)∗idiq] T_e=1.5N_p[\Phi_fi_q+(L_d-L_q)*i_di_q] Te=1.5Np[Φfiq+(Ld−Lq)∗idiq]
- 电压方程
据此可以建立电机电流环的传递函数
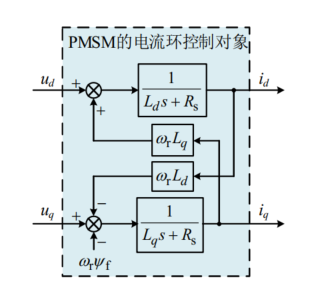
图1:电流环传递函数
PI控制原理与实现
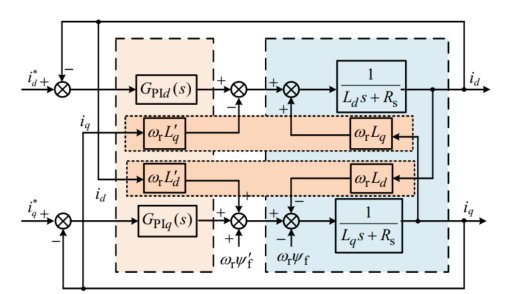
图2:电流PI前馈解耦
内模控制原理与实现
我们已知电机电流环对应的传递函数
[UdUq]=[Rs+sLd−weLqweLdRs+sLq]∗[idiq]+[0weΦf]
\begin{bmatrix}
U_d \\
U_q
\end{bmatrix} = \begin{bmatrix}
R_s+sL_d & -w_eL_q \\
w_eL_d& R_s+sL_q
\end{bmatrix}* \begin{bmatrix}
i_d \\
i_q
\end{bmatrix}+\begin{bmatrix}
0 \\
w_e\Phi_f
\end{bmatrix}
[UdUq]=[Rs+sLdweLd−weLqRs+sLq]∗[idiq]+[0weΦf]
据此可以得到电流环系统:
M(s)=[Rs+sLd−weLqweLdRs+sLq]
M(s)=
\begin{bmatrix}
R_s+sL_d & -w_eL_q \\
w_eL_d& R_s+sL_q
\end{bmatrix}
M(s)=[Rs+sLdweLd−weLqRs+sLq]
因此对应主控制器传递函数:
C(s)=M(s)−1∗[αα+s00αα+s]
C(s)=M(s)^{-1}*
\begin{bmatrix}
\frac{\alpha}{\alpha+s} & 0 \\
0& \frac{\alpha}{\alpha+s}
\end{bmatrix}
C(s)=M(s)−1∗[α+sα00α+sα]
最终可以推导出以下内模控制环的框图
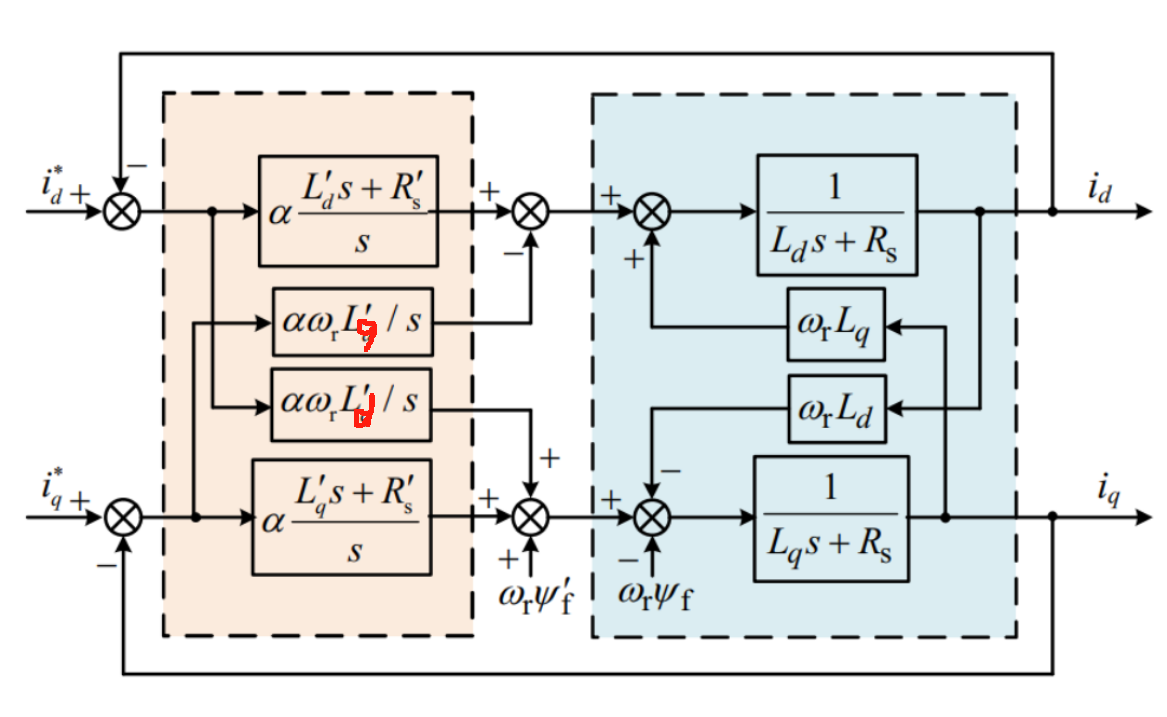
图3:内模等效控制框图
仿真与实验验证
- 仿真平台搭建(如MATLAB/Simulink)
| 参数 | 值 |
|---|---|
| 版本 | matlab2019a |
| 极对数 | 4 |
| Rs | 0.025 |
| Ld | 0.2e-3 |
| Lq | 0.47e-3 |
| 磁链Phif | 0.062 |
| 转动惯量J | 1e-2 |
| 死区时间 | 2微秒 |
| Udc | 198V |
| Imax | 110A |
| 控制周期 | 100微秒 |
| 开关频率 | 10kHz |
-
MTPA公式查表
id=−ϕf+ϕf2+4(Ld−Lq)2iq22(Ld−Lq) i_d= \frac{-\phi_f+\sqrt{\phi_f^2+4(L_d-L_q)^2i_q^2}}{2(L_d-L_q)} id=2(Ld−Lq)−ϕf+ϕf2+4(Ld−Lq)2iq2
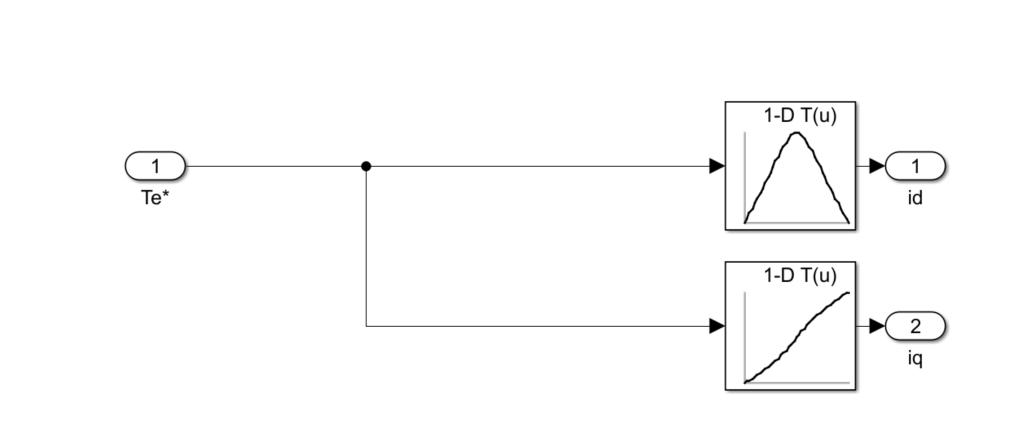 图4:MTPA查表
图4:MTPA查表 -
电流环PI计算
id_kp= Ld/3/Ts;
id_ki= Rs/3/Ts;
iq_kp = Lq/3/Ts;
iq_ki= Rs/3/Ts; -
Simulink框图搭建
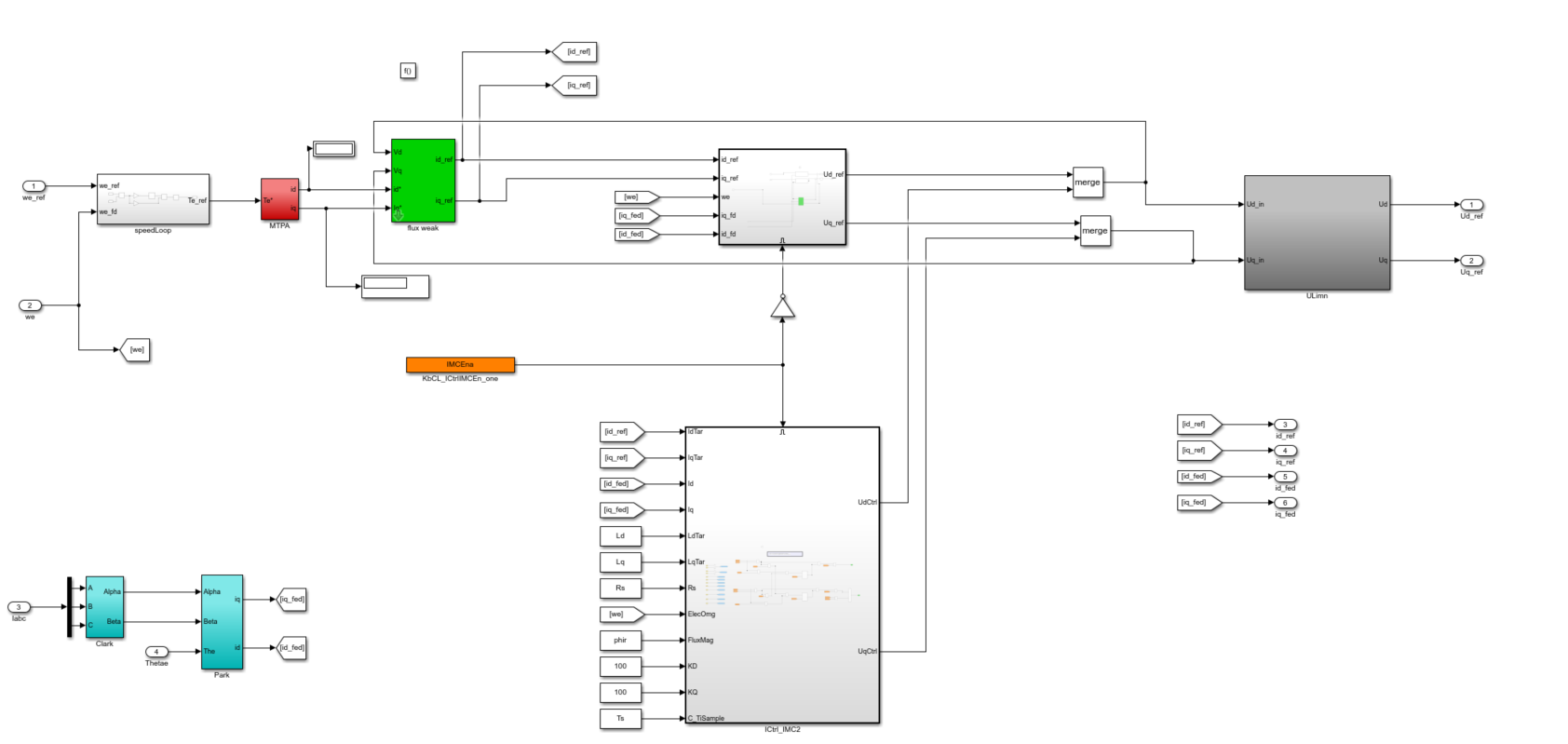
图5:Simulink控制框图
性能对比分析
- 动态响应对比
-
PI控制,目标转速1500rpm,负载转矩从2Nm阶跃到4Nm
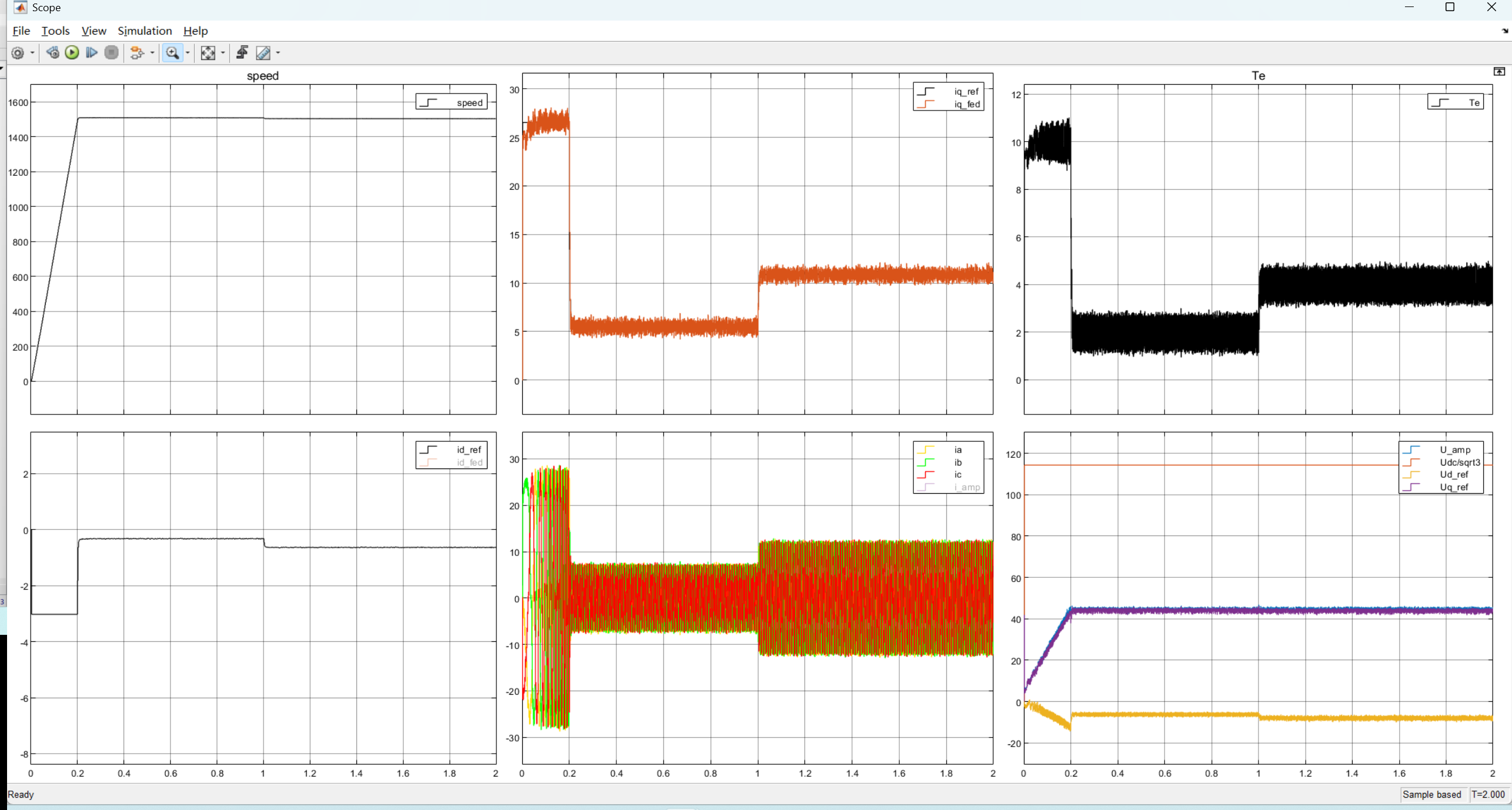
图6:PI控制@1500rpm2Nm step 4Nm -
内模控制,目标转速1500rpm,负载转矩从2Nm阶跃到4Nm
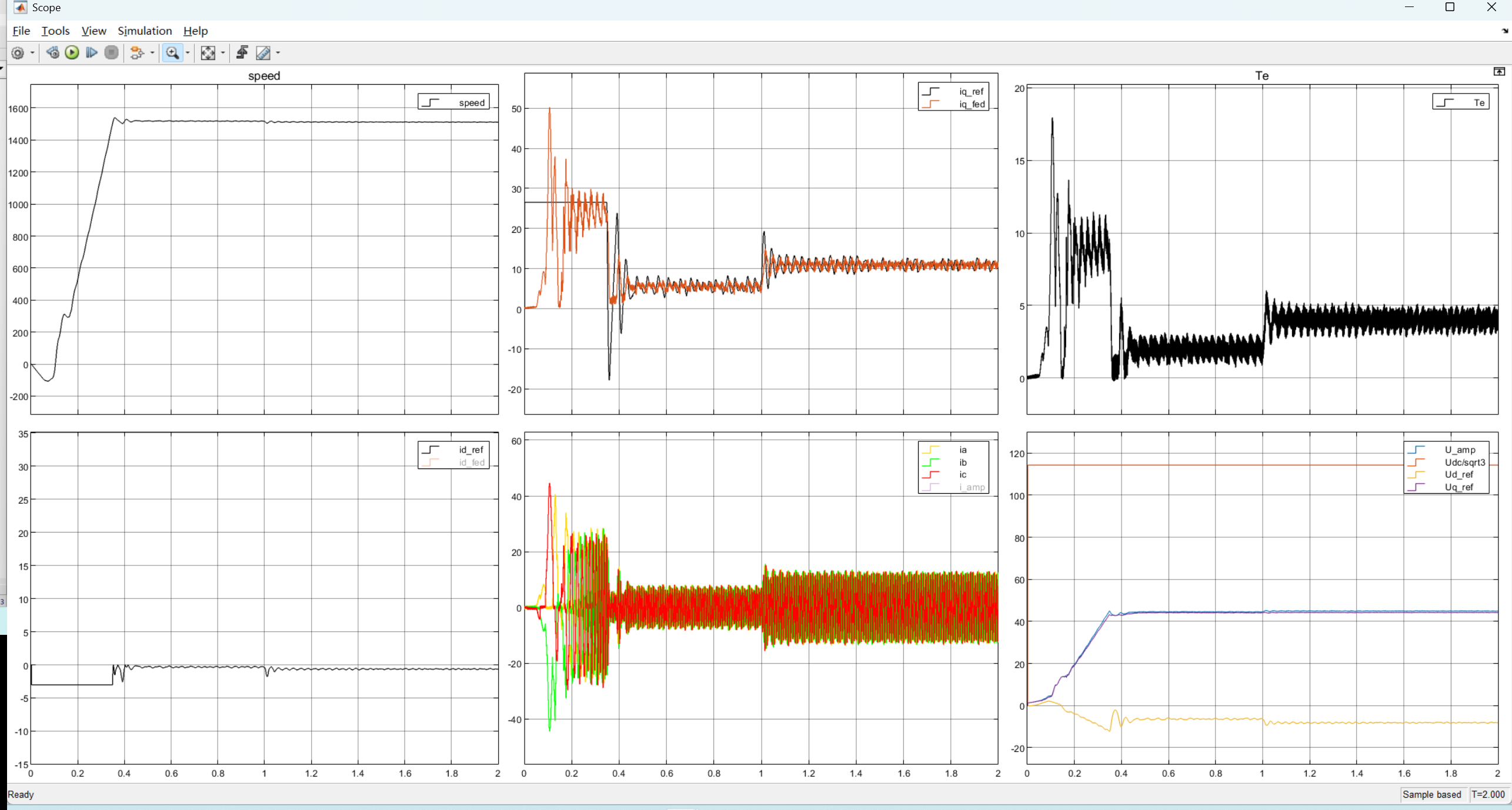
图7:内模控制@1500rpm2Nm step 4Nm -
PI控制,目标转速4500rpm,进入弱磁区,负载转矩从2Nm阶跃到4Nm
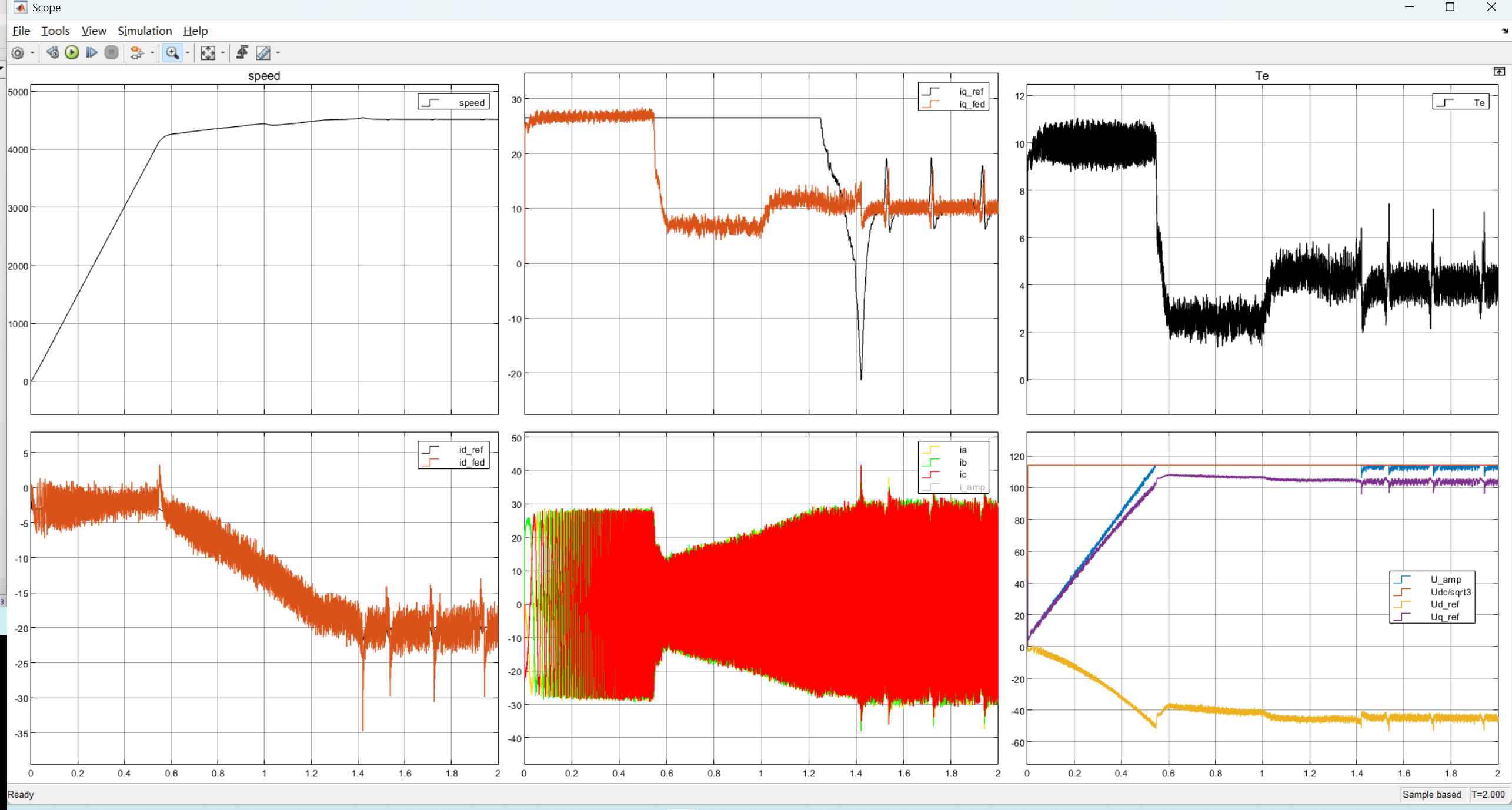
图8:PI控制@4500rpm2Nm step 4Nm -
内模控制,目标转速4500rpm,进入弱磁区,负载转矩从2Nm阶跃到4Nm
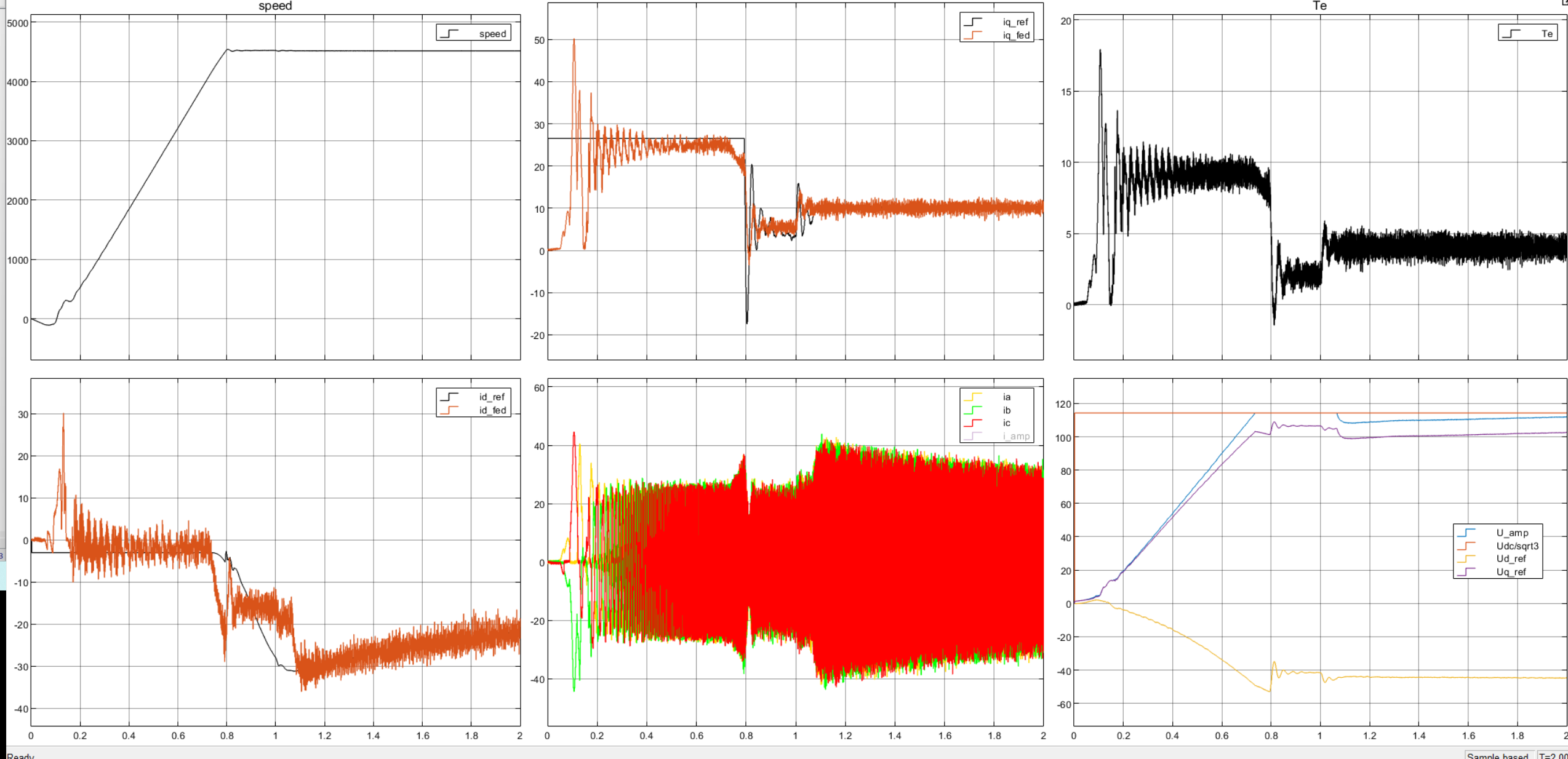
图9:内模控制@4500rpm2Nm step 4Nm
结论与展望
两种控制策略的综合评价
- 实际上两者控制效果区别很小,低速时PI似乎有更好的控制效果,pi控制的高频分量更多,而内模控制似乎引入更多的是低频;
- 高速状态下,PI对应的Kp Ki参数可能不太适应当前的工况,理论上调整pi参数能让控制达到更好的状态,似乎内模控制对于工况的适应性更好,高转速下也能有不错的控制表现
- 水平有限,这都是我粗浅的理解,欢迎大家讨论
- 以上 咸鱼可搜“离家出走的小蛤”
参考:永磁同步电机驱动系统电流环解耦方法研究 顾胜东 东南大学

















 5545
5545

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









