







 本文详细介绍了SIFT(尺度不变特征变换)算法,包括其简介、特点、主要流程、关键点检测和匹配的概念,以及高斯模糊和高斯金字塔在SIFT中的应用。文章还探讨了SIFT算法在图像处理中的实际应用,如地理标记图像的匹配。
本文详细介绍了SIFT(尺度不变特征变换)算法,包括其简介、特点、主要流程、关键点检测和匹配的概念,以及高斯模糊和高斯金字塔在SIFT中的应用。文章还探讨了SIFT算法在图像处理中的实际应用,如地理标记图像的匹配。
目录
一、SIFT(尺度不变特征变化)
1.1 SIFT简介
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。
1.2 SIFT特点
1.SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
2. 区分性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
3. 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
4.高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
5.可扩展性,可以很方便的与其他形式的特征向量进行联合。
1.3 SIFT算法主要流程
1、提取关键点:关键点是一些十分突出的不会因光照、尺度、旋转等因素而消失的点,比如角点、边缘点、暗区域的亮点以及亮区域的暗点。此步骤是搜索所有尺度空间上的图像位置。通过高斯微分函数来识别潜在的具有尺度和旋转不变的兴趣点。
2、定位关键点并确定特征方向:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。然后基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
3. 通过各关键点的特征向量,进行两两比较找出相互匹配的若干对特征点,建立景物间的对应关系。
1.4关键点检测的相关概念
1.4.1 哪些点是SIFT中要查找的关键点(特征点)
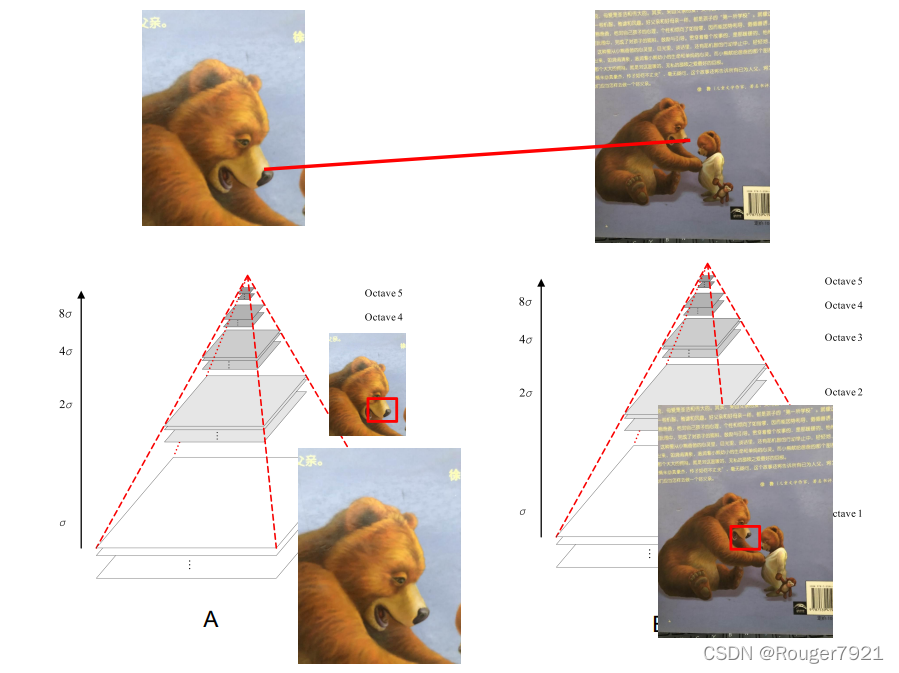
这些点是一些十分突出的点,不会因光照、尺度、旋转等因素的改变而消 失,比如角点、边缘点、暗区域的亮点以及亮区域的暗点。假定两幅图像中 有相同的景物,那么使用某种算法分别提取各自的特征点,这些点之间会有 相互对应的匹配关系。
1.4.2 什么是尺度空间(scale space )
尺度空间理论最早于1962年提出,其主要思想是通过对原 始图像进行尺度变换,获得图像多尺度下的空间表示。从而实 现边缘、角点检测和不同分辨率上的特征提取,以满足特征点 的尺度不变性。 2. 什么是尺度空间(scale space )? 关键点检测的相关概念 尺度空间中各尺度图像的模 糊程度逐渐变大,能够模拟人在 距离目标由近到远时目标在视网 膜上的形成过程。 尺度越大图像越模糊。
1.4.3 高斯模糊
高斯模糊是在Adobe Photoshop等图像处理软件中广泛使用的处理 效果,通常用它来减小图像噪声以及降低细节层次。这种模糊技术生成 的图像的视觉效果是好像经过一个半透明的屏幕观察图像。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









