




将平面看成是复数空间平面时,绕原点O旋转θ\thetaθ角度等价于乘上下面的数
eiθ=cos(θ)+sin(θ)
e^{i\theta} = \cos (\theta) + \sin (\theta)
eiθ=cos(θ)+sin(θ)
这些数字的集合构成一个单位圆或者称为1-d球体
S1={z:∣z∣=1}
S^1 = \{z:|z| = 1\}
S1={z:∣z∣=1}
其中S1S^1S1不仅是一个几何实体,在复数乘法下也构成一个代数结构,称之为群。其乘法运算eiθi⋅eiθ2=ei(θ1+θ2)e^{i\theta_i}\cdot e^{i \theta_2} = e^{i(\theta_1+\theta_2)}eiθi⋅eiθ2=ei(θ1+θ2),逆运算(eiθ)−1=ei(−θ)(e^{i \theta})^{-1} = e^{i (-\theta)}(eiθ)−1=ei(−θ)光滑的依赖于参数θ\thetaθ。这种光滑的性质,使得S1S^1S1被称为李群(Lie group)
然而,在某些方面S1S^1S1过于特殊,无法很好的说明李理论。S1S^1S1群是一维的并满足交换律(复数乘法满足交换律),这些复数性质使得其在李理论中过于特殊。
为了获得更有意义的李群,我们定义四维的代数四元数,以及在四维空间中的3维球体S3S^3S3。在四元数的乘法下,S3S^3S3构成一个和空间旋转相关的非交换李群记为SU(2)SU(2)SU(2)。
平面上的旋转
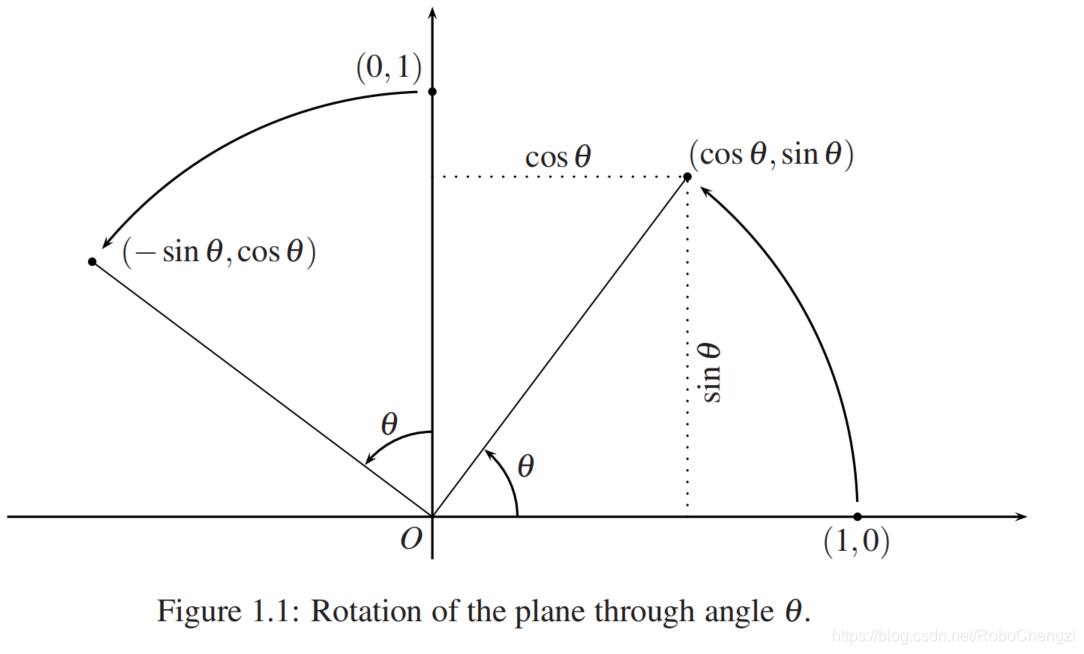
如下图所示,在R2R^2R2空间中绕原点OOO旋转角度θ\thetaθ可以认为是一个线性变换RθR_{\theta}Rθ,将基向量(0,1)(0,1)(0,1)和(1,0)(1,0)(1,0)变换到(cosθ,sinθ)(\cos \theta ,\sin \theta)(cosθ,sinθ)和(−sinθ,cosθ)(-\sin \theta,\cos \theta)(−sinθ,cosθ)。
对于一般的向量可以看成基向量的线性组合
(x,y)=x(1,0)+y(0,1)→(xcosθ−ysinθ,xsinθ+ycosθ)
(x,y) = x(1,0) + y(0,1) \to (x \cos \theta - y \sin \theta, x \sin \theta + y \cos \theta)
(x,y)=x(1,0)+y(0,1)→(xcosθ−ysinθ,xsinθ+ycosθ)
因此,旋转变换可以用如下的矩阵表达
(cosθ−sinθsinθcosθ)
\left(\begin{matrix}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta
\end{matrix}\right)
(cosθsinθ−sinθcosθ)
我们将其该矩阵为RθR_{\theta}Rθ。对于点(x,y)(x,y)(x,y)的旋转变换等价于列向量(xy)\left(\begin{matrix}
x \\
y \end{matrix}\right)(xy)左乘矩阵RθR_{\theta}Rθ。
Rθ(xy)=(cosθ−sinθsinθcosθ)(xy)=(xcosθ−ysinθxsinθ+ycosθ)
R_{\theta} \left(\begin{matrix}
x \\
y
\end{matrix}\right) = \left(\begin{matrix}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta
\end{matrix}\right) \left(\begin{matrix}
x \\
y
\end{matrix}\right) = \left(\begin{matrix}
x \cos \theta - y \sin \theta \\
x \sin \theta + y \cos \theta
\end{matrix}\right)
Rθ(xy)=(cosθsinθ−sinθcosθ)(xy)=(xcosθ−ysinθxsinθ+ycosθ)
由于在左侧乘上矩阵,因此先乘上RϕR_{\phi}Rϕ然后乘上RθR_{\theta}Rθ等价于乘上它们的乘积矩阵RϕRθR_{\phi} R_{\theta}RϕRθ。
因此我们可以使用矩阵的连乘运算表达几何上连续的旋转操作。本书的主要目的在于阐明如下观点,能通过矩阵群的表达方式来研究线性变换群。目前你可以将矩阵群看作包含矩阵AAA,BBB,矩阵ABABAB,和矩阵A−1A^{-1}A−1,B−1B^{-1}B−1的一个集合。后续内容中(在7.2节)将介绍额外的条件保证矩阵群的光滑性,目前我们不需要考虑光滑性的准确含义。
对任意角度θ\thetaθ的矩阵RθR_{\theta}Rθ构成了所谓的特殊正交群SO(3)SO(3)SO(3),将旋转称为正交变换的原因我们将在第三章中提及,并将旋转的思想拓展到RnR^nRn空间中,并为每一维空间定义一个群SO(n)SO(n)SO(n)。在本章我们主要关注SO(2)SO(2)SO(2)和SO(3)SO(3)SO(3),他们在某些方面是有代表意义的。
对于R2R^2R2空间中的一个旋转,可以用一个复数来表达
zθ=cosθ+isinθ
z_{\theta} = \cos \theta + i \sin \theta
zθ=cosθ+isinθ
因对对任意一个点(x,y)=x+iy(x,y) = x+iy(x,y)=x+iy乘上zθz_{\theta}zθ能够得到:
zθ(x+iy)=(cosθ+isinθ)(x+iy)=(xcosθ−ysinθ,xsinθ+ycosθ)
\begin{aligned}
z_{\theta}(x + iy) &= (\cos \theta + i \sin \theta)(x + iy) \\
&= (x \cos \theta - y \sin \theta,x \sin \theta + y \cos \theta)
\end{aligned}
zθ(x+iy)=(cosθ+isinθ)(x+iy)=(xcosθ−ysinθ,xsinθ+ycosθ)
其结果等于对点(x,y)(x,y)(x,y)旋转角度θ\thetaθ。普通的乘法zθzϕz_{\theta}z_{\phi}zθzϕ就表达了RθR_{\theta}Rθ和RϕR_{\phi}Rϕ的组合。
R3R^3R3空间中的旋转能够被稍微复杂一点的“四维数”,四元数表达。我们将在1.2节首先介绍复数和2×22\times22×2矩阵之间的关系,然后1.3节中通过2×22\times22×2的复数矩阵引入四元数。
什么是李群
李群最一般的定义为它是一个群并且是一个光滑流形。这意味着该群的乘法和求逆运算在流形G上是一个光滑的函数。
复数的矩阵表达
矩阵Rθ=(cosθ−sinθsinθcosθ)R_{\theta} = \left(\begin{matrix}
\cos \theta & - \sin \theta \\ \sin \theta & \cos \theta
\end{matrix}\right)Rθ=(cosθsinθ−sinθcosθ)与复数zθ=cosθ+isinθz_{\theta} = \cos \theta + i \sin \thetazθ=cosθ+isinθ的等价性,能够在如下的线性组合的形式下看出
Rθ=cosθ(1001)+sinθ(0−110)
R_{\theta} = \cos \theta \left(\begin{matrix}
1 & 0 \\0 &1
\end{matrix}\right) + \sin \theta \left(\begin{matrix}
0 & -1 \\1 & 0
\end{matrix}\right)
Rθ=cosθ(1001)+sinθ(01−10)
基矩阵为
1=(1001),i=(0−110)
1 = \left(\begin{matrix}
1 &0 \\0 & 1
\end{matrix}\right) ,i = \left(\begin{matrix}
0 & -1 \\1 & 0
\end{matrix}\right)
1=(1001),i=(01−10)
满足如下性质
12=1,1i=i1=i,i2=−1
1^2 = 1,1i = i1 = i,i^2 = -1
12=1,1i=i1=i,i2=−1
因此矩阵1,i1,i1,i和复数i,ii,ii,i具有完全相同的性质。这意味着
(a−bba)=a1+bi
\left(\begin{matrix}
a & -b \\b & a
\end{matrix}\right) = a1 + bi
(ab−ba)=a1+bi
在加法、乘法运算下所有的复数都能用2×22\times 22×2的矩阵表达,不局限于表达旋转的复数zθz_{\theta}zθ。这种表达提供了复数的特定性质的线性代数表达,例如
- 复数的绝对值∣a+bi∣2=a2+b2|a+bi|^2 = a^2 + b^2∣a+bi∣2=a2+b2等于2×22\times 22×2矩阵的秩。
- 绝对值的连乘性质∣z1z2∣=∣z1∣∣z2∣|z_1z_2| = |z_1||z_2|∣z1z2∣=∣z1∣∣z2∣来自于矩阵秩的连乘性质
det(A1A2)=det(A1)det(A2) \det (A_1 A_2) = \det (A_1) \det(A_2) det(A1A2)=det(A1)det(A2) - 复数的逆对应于矩阵的逆z−1=a−bia2+b2z^{-1} = \frac{a-bi}{a^2+b^2}z−1=a2+b2a−bi
(a−bba)−1=1a2+b2(ab−ba) \left(\begin{matrix} a & -b \\b & a \end{matrix}\right) ^{-1} = \frac{1}{a^2+b^2} \left(\begin{matrix} a & b \\ -b & a \end{matrix}\right) (ab−ba)−1=a2+b21(a−bba)
两平方等价性质
对于复数z1=a1+b1iz_1 = a_1 + b_1 iz1=a1+b1i和z2=a2+b2iz_2 = a_2 + b_2 iz2=a2+b2i满足如下性质
(a12+b12)(a22+b22)=(a1a2−b1b2)2+(a1b2+a2b1)2
(a1^2 + b_1^2)(a_2^2 + b_2^2) = (a_1 a_2 - b_1 b_2)^2 + (a_1b_2+a_2b_1)^2
(a12+b12)(a22+b22)=(a1a2−b1b2)2+(a1b2+a2b1)2
四元数
将有序对(a,b)(a,b)(a,b)表达为复数a+bia+bia+bi或者矩阵(a−bba)\left(\begin{matrix}
a & -b \\ b & a
\end{matrix}\right)(ab−ba)则可以定义有序对的和、积和绝对值。同样对于四维有序对(a,b,c,d)能够表达为矩阵形式
q=(a+id−b−icb−ica−id)
q = \left(\begin{matrix}
a+id & -b-ic \\ b-ic & a-id
\end{matrix}\right)
q=(a+idb−ic−b−ica−id)
我们将其称为四元数q=a+bi+cj+dkq = a + bi + cj + dkq=a+bi+cj+dk的矩阵形式,同样的对于两种形式的表达能够定义平方绝对值∣q∣2|q|^2∣q∣2
detq=det(a+id−b−icb−ica−id)=a2+b2+c2+d2
\det q = \det \left(\begin{matrix}
a+id & -b-ic \\ b-ic & a-id
\end{matrix}\right) = a^2 + b^2 + c^2 + d^2
detq=det(a+idb−ic−b−ica−id)=a2+b2+c2+d2
因此∣q∣2|q|^2∣q∣2等于点(a,b,c,d)(a,b,c,d)(a,b,c,d)到原点OOO在R4R^4R4空间中的平方距离。
四元数的和运算和加法具有相同的性质,即
- 交换律 q1+q2=q2+q1q_1 + q_2 = q_2 + q_1q1+q2=q2+q1
- 结合律 q1+(q2+q3)=(q1+q2)+q3q_1 + (q_2 + q_3) = (q_1 + q_2) + q_3q1+(q2+q3)=(q1+q2)+q3
- 求逆 q+(−q)=0q + (-q) = 0q+(−q)=0
- 单位元 q+0=qq + 0 = qq+0=q
四元数的乘法并不满足交换律,也就是说q1q2=q2q1q_1 q_2 = q_2 q_1q1q2=q2q1不成立,但是对于矩阵乘法运算的一些性质可以直接套用到四元数乘法中:
- 结合律 q1(q2q3)=(q1q2)q3q_1(q_2q_3) = (q_1q_2)q_3q1(q2q3)=(q1q2)q3
- 逆元 qq−1=1,q≠0qq^{-1} = 1,q \neq 0qq−1=1,q=0
- 单位元 q1=qq 1 = qq1=q
- 左分配律 q1(q2+q3=q1q2+q1q3q_1(q_2+q_3 = q_1q_2 + q_1q_3q1(q2+q3=q1q2+q1q3
将四元数写成如下形式能够更好的体现非交换的性质
(a+id−b−icb−ica−id)=a1+bi+cj+dk
\left(\begin{matrix}
a+id & -b-ic \\ b-ic & a-id
\end{matrix}\right) = a 1 + b i + c j + d k
(a+idb−ic−b−ica−id)=a1+bi+cj+dk
其中
1=(1001),i=(0−110),j=(0−i−i0),k=(i00−i)
1 = \left(\begin{matrix}
1 & 0 \\ 0 & 1
\end{matrix}\right),i = \left(\begin{matrix}
0 & -1 \\ 1 & 0
\end{matrix}\right),j=\left(\begin{matrix}
0 & -i \\ -i & 0
\end{matrix}\right),k=\left(\begin{matrix}
i & 0 \\ 0 & -i
\end{matrix}\right)
1=(1001),i=(01−10),j=(0−i−i0),k=(i00−i)
因此有i2=j2=k2=−1i^2 = j^2 = k^2 = -1i2=j2=k2=−1
非交换性集中体现在i,j,ki,j,ki,j,k之间乘积上,两个不同元素的乘积为圆上的第三个元素。
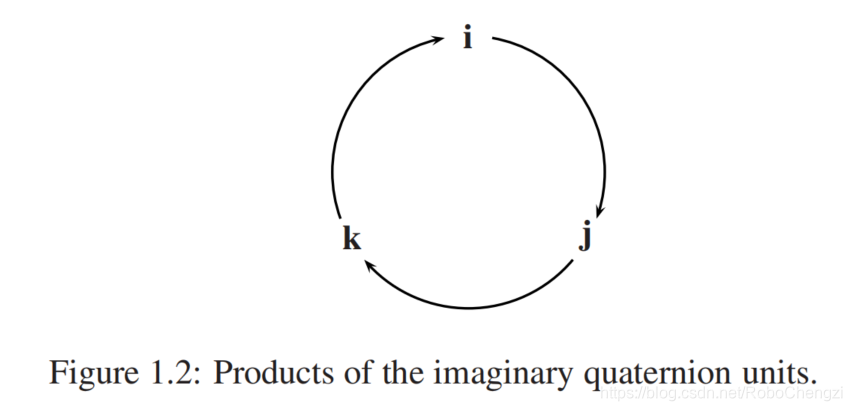
如果箭头从第一个元素指向第二个元素则得到正号,反之则是负号。例如,ij=kij=kij=k但是ji=−kji=-kji=−k因此ij≠jiij \neq jiij=ji
四元数的不可交换性实际上是一个好事,因为这样就能表达一些非交换的旋转,例如在三维空间中的旋转变换则为非交换的。
和复数一样,四元数的一些不明显的性质也有相应的线性代数的解释。
- 绝对值的交换律 |q_1 q_2| = |q_1||q_2|,等价于矩阵秩的交换律det(q1q2)=det(q1)det(q2)\det(q_1 q_2) = \det(q_1) \det(q_2)det(q1q2)=det(q1)det(q2)
- 矩阵的逆对应四元数的逆,对于q=a1+bi+cj+dkq = a 1 + b i +c j + d kq=a1+bi+cj+dk
q−1=1a2+b2+c2+d2(a1−bi−cj−dk) q^{-1} = \frac{1}{a^2+b^2+c^2+d^2}(a1-bi-cj-dk) q−1=a2+b2+c2+d21(a1−bi−cj−dk) - 四元数a1−bi−cj−dka1-bi-cj-dka1−bi−cj−dk称为原四元数的共轭四元数q^\hat{q}q^,有qq^=a2+b2+c2+d2=∣q∣2q \hat{q} = a^2 + b^2 + c^2 + d^2 = |q|^2qq^=a2+b2+c2+d2=∣q∣2
- 共轭四元数性质(q1q2)^=q1^q2^\hat{(q_1 q_2)} = \hat{q_1} \hat{q_2}(q1q2)^=q1^q2^
单位四元数构成的三维球体
绝对值等于一的四元数称为单位四元数,满足如下等式
a2+b2+c2+d2=1
a^2 + b^2 + c^2 + d^2 = 1
a2+b2+c2+d2=1
因此,在四维空间(a,b,c,d)中构成了一个三个自由度的球体S3S^3S3。从累乘的性质可以看出,单位四元数的乘积依旧是一个单位四元数,因此S3S^3S3是在四元数乘法下的群。类似于单位复数构成的一维球体,单位四元数构成的三维球体尽管不是那么直接能看出来,但同样包含了一组旋转。接下来两节中,我们将展示单位四元数是如何表达R3R^3R3空间中的旋转。
绝对值乘法的结果
对于复数和四元数,绝对值乘法首先作为平方和的性质。出现在数论中。人们非常晚才注意到其将乘法和R2,R3R^2,R^3R2,R3空间中的刚体运动的联系起来。假设uuu是绝对值为1的复数,考虑vvv和www是任意的两个复数,uv,uwuv,uwuv,uw分别是相乘后的四元数。
uvuvuv到uwuwuw之间的距离
∣uv−uw∣=∣u(v−w)∣=∣u∣∣v−w∣=∣v−w∣
|uv - uw|
= |u(v-w)| = |u||v-w| = |v-w|
∣uv−uw∣=∣u(v−w)∣=∣u∣∣v−w∣=∣v−w∣
换句话说乘上一个单位四元数,是一个刚体变换或者说平面中的等距变换,不改变两点之间的距离。此外等距变换保持原点是固定的,因为u×0=0u\times 0=0u×0=0。如果u≠1u\neq 1u=1,那么没有其他点是固定的,因为uv=vuv=vuv=v仅当u=1u=1u=1时成立。因此具有这些特性的运动只有绕原点OOO的旋转。
至少就保持距离而言,同样的论点也适用于四元数乘法。因此将这种等距性解释为R4R^4R4空间的旋转,但是我们首先希望展示四元数的乘法提供了研究R3R^3R3空间中的旋转的一种方法。在了解原因之前,我们先来看四元数的一个自然三维子空间。
纯虚四元数
纯虚四元数有如下的形式
p=bi+cj+dk
p = bi + cj + dk
p=bi+cj+dk
它们构成一个三维空间,我们记为Ri+Rj+RkRi+Rj+RkRi+Rj+Rk,有时候简记为R3R^3R3。形如a1a 1a1的四元数构成的空间线R1R1R1的正交补空间则为Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间。从现在起,我们把实四元数写成1,简单地用R表示实四元数线。
显然,Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的两个元素和也是Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的元素,但是对于乘积则并非如此。实际上,如果u=u1i+u2j+u3ku=u_1i + u_2 j+u_3ku=u1i+u2j+u3k,v=v1i+v2j+v3kv=v_1i+v_2j+v_3kv=v1i+v2j+v3k,则他们的乘积如下
uv=−(u1v1+u2v2+u3v3)+(u2v3−u3v2)i−(u1v3−u3v1)j+(u1v2−u2v1)k
uv = -(u_1v_1+u_2v_2+u_3v_3) + (u_2v_3-u_3v_2)i\\-(u_1v_3-u_3v_1)j+(u_1v_2-u_2v_1)k
uv=−(u1v1+u2v2+u3v3)+(u2v3−u3v2)i−(u1v3−u3v1)j+(u1v2−u2v1)k
利用线性代数中的点乘和叉乘表达四元数的乘法为
uv=−u⋅v+u×v
uv = -u\cdot v + u \times v
uv=−u⋅v+u×v
公式表明,如果u,vu,vu,v同向或者反向,则有u×v=0u\times v=0u×v=0,因此uvuvuv为实四元数。特殊的,如果u∈Ri+Rj+Rku\in Ri+Rj+Rku∈Ri+Rj+Rk并且∣u∣=1|u|=1∣u∣=1,那么
u2=−u⋅u=−∣u∣2=−1
u^2 = -u \cdot u= -|u|^2 = -1
u2=−u⋅u=−∣u∣2=−1
因此对于任意的属于Ri+Rj+RkRi+Rj+RkRi+Rj+Rk的单位向量,都是“-1的平方根”。
空间旋转的四元数表达
绝对值为1的四元数和绝对值为1的复数一样,有实部值为cosθ\cos \thetacosθ并且有虚部值为sinθ\sin \thetasinθ,正交于实部,因此位于Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中,这意味着
t=cosθ+usinθ
t=\cos \theta + u \sin \theta
t=cosθ+usinθ
其中,u为Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的一个单位向量,并且由上一节可知u2=−1u^2=-1u2=−1。
这样一个单位四元数ttt包含了Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的旋转,尽管不是简单的使用乘法,因为t和Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的一个元素相乘得到的四元数可能不属于Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间。实际上我们对任意一个q∈Ri+Rj+Rkq\in Ri+Rj+Rkq∈Ri+Rj+Rk进行t−1qtt^{-1}qtt−1qt的运算,返回的值一定是Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的元素。
为了证明这个结论,我们首先有如下记号
t−1=cosθ−usinθ
t^{-1} = \cos \theta - u \sin \theta
t−1=cosθ−usinθ
- 对于实四元数rrr,则有t−1rt=rt^{-1}rt=rt−1rt=r,因此对于四元数的实部一定映射到实部。
- 由于ttt可逆,则有p=t−1qtp=t^{-1}qtp=t−1qt对应的逆映射q=tpt−1q=tpt^{-1}q=tpt−1
- 假设p=t−1qt∉Ri+Rj+Rkp=t^{-1}qt \notin Ri+Rj+Rkp=t−1qt∈/Ri+Rj+Rk,则由第二点知q=tpt−1∉Ri+Rj+Rkq=tpt^{-1} \notin Ri+Rj+Rkq=tpt−1∈/Ri+Rj+Rk,与原假设相违背。
因此有结论∀q∈Ri+Rj+Rk,t−1qt∈Ri+Rj+Rk\forall q\in Ri+Rj+Rk,t^{-1}qt\in Ri+Rj+Rk∀q∈Ri+Rj+Rk,t−1qt∈Ri+Rj+Rk。
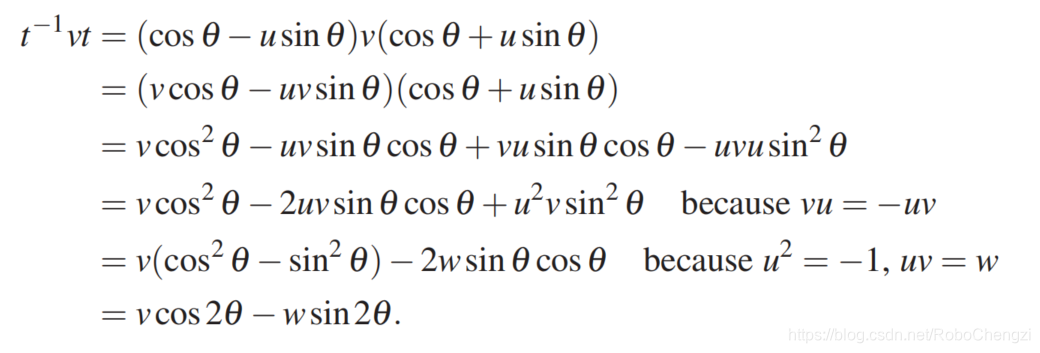
四元数旋转定理 :如果有t=cosθ+usinθt=\cos \theta + u \sin \thetat=cosθ+usinθ,其中u∈Ri+Rj+Rku\in Ri+Rj+Rku∈Ri+Rj+Rk,为一个单位向量。那么四元数ttt代表将Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间绕轴uuu旋转2θ2\theta2θ角度。
证明:首先观察到直线RuRuRu在四元数旋转变换中保持不变,因为
t−1ut=(cosθ−usinθ)u(cosθ+usinθ)=(ucosθ−u2sinθ)(cosθ+usinθ)=(ucosθ+sinθ)(cosθ+usinθ)=u(cos2θ+sin2θ)+sinθcosθ+u2sinθcosθ=u
\begin{aligned}
t^{-1}ut &= (\cos \theta - u\sin \theta)u(\cos \theta + u\sin \theta) \\
&= (u\cos \theta - u^2\sin \theta)(\cos \theta + u\sin \theta)\\
&= (u\cos \theta + \sin \theta)(\cos \theta + u\sin \theta)\\
&= u(\cos^2\theta + \sin^2\theta)+\sin \theta \cos \theta + u^2 \sin \theta \cos \theta \\
&= u\\
\end{aligned}
t−1ut=(cosθ−usinθ)u(cosθ+usinθ)=(ucosθ−u2sinθ)(cosθ+usinθ)=(ucosθ+sinθ)(cosθ+usinθ)=u(cos2θ+sin2θ)+sinθcosθ+u2sinθcosθ=u
任意选取一个单位向量vvv垂直于uuu,则有u⋅v=0u\cdot v=0u⋅v=0,然后定义w=u×vw=u\times vw=u×v。由此构造了一个Ri+Rj+RkRi+Rj+RkRi+Rj+Rk空间中的一个正交坐标系。
对于基向量vvv
同理可推导得到t−1wt=vsin2θ+wcos2θt^{-1}wt=v \sin 2\theta + w\cos 2\thetat−1wt=vsin2θ+wcos2θ。
根据定义,绕向量uuu的旋转,对于uuu向量上的直线保持位置不变,绕和uuu垂直向量的旋转则可套用2d空间中的旋转公式,因此可知旋转的角度为2θ2\theta2θ
定理旋转的乘积依旧是旋转,旋转的逆也是旋转,旋转构成群。
利用单位四元数的性质证明即可,较为简单。

















 2390
2390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









