




 本文介绍如何利用已知的点对求解图像变换矩阵H的方法。矩阵H用于将一幅图像上的点映射到另一幅图像上对应的点。文章详细阐述了通过最小二乘法或RANSAC算法求解矩阵H的过程。
本文介绍如何利用已知的点对求解图像变换矩阵H的方法。矩阵H用于将一幅图像上的点映射到另一幅图像上对应的点。文章详细阐述了通过最小二乘法或RANSAC算法求解矩阵H的过程。
理论
矩阵H会将一幅图像上的一个点的坐标a=(x,y,1)映射成另一幅图像上的点的坐标b=(x1,y1,1),但H是未知的。通常需要根据在同一平面上已知的一些点对(比如a,b)来求H。 假设已知点对(a,b),则有下面的公式:
H
=
[
h
11
h
12
h
13
h
21
h
22
h
23
h
31
h
32
h
33
]
H=\begin{bmatrix}h_{11}&h_{12}&h_{13}\\h_{21}&h_{22}&h_{23}\\h_{31}&h_{32}&h_{33}\end{bmatrix}
H=⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤
[
x
1
y
1
1
]
=
[
h
11
h
12
h
13
h
21
h
22
h
23
h
31
h
32
h
33
]
[
x
y
1
]
即
{
x
1
=
h
11
x
+
h
12
y
+
h
13
y
1
=
h
21
x
+
h
22
y
+
h
23
1
=
h
31
x
+
h
32
y
+
h
33
\begin{bmatrix}x_1\\y_1\\1\end{bmatrix} =\begin{bmatrix}h_{11}&h_{12}&h_{13}\\h_{21}&h_{22}&h_{23}\\h_{31}&h_{32}&h_{33}\end{bmatrix} \begin{bmatrix}x\\y\\1\end{bmatrix}\\ 即\left\{\begin{array}{l}x_1=h_{11}x + h_{12}y + h_{13}\\ y_1=h_{21}x + h_{22}y + h_{23}\\ 1=h_{31}x + h_{32}y + h_{33} \\ \end{array}\right.
⎣⎡x1y11⎦⎤=⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤⎣⎡xy1⎦⎤即⎩⎨⎧x1=h11x+h12y+h13y1=h21x+h22y+h231=h31x+h32y+h33
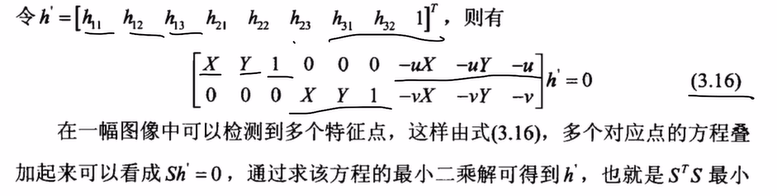
∵ 1 = h 31 x + h 32 y + h 33 ⇒ { x 1 = x 1 1 = h 11 x + h 12 y + h 13 h 31 x + h 32 y + h 33 y 1 = y 1 1 = h 21 x + h 22 y + h 23 h 31 x + h 32 y + h 33 令 A = [ − x − y − 1 0 0 0 x x 1 y x 1 x 1 0 0 0 − x − y − 1 x y 1 y y 1 y 1 ] , h = [ h 11 , h 12 , h 13 , h 21 , h 22 , h 23 , h 31 , h 32 , h 33 ] T , 则 两 点 的 对 应 可 写 为 : A 2 × 9 ∗ h 9 × 1 = 0 \because 1=h_{31}x + h_{32}y + h_{33}\Rightarrow \\ \large \left\{\begin{array}{l}x_1=\frac{x_1}{1}=\frac{h_{11}x + h_{12}y + h_{13}}{h_{31}x + h_{32}y + h_{33}} \\y_1=\frac{y_1}{1}=\frac{h_{21}x + h_{22}y + h_{23}}{h_{31}x + h_{32}y + h_{33}} \end{array}\right.\\ \normalsize 令A=\begin{bmatrix} -x & -y &-1&0&0&0&xx_1&yx_1&x_1 \\ 0&0&0& -x & -y &-1&xy_1&yy_1&y_1 \\ \end{bmatrix},\\ h=[h_{11} , h_{12} , h_{13} , h_{21} , h_{22} , h_{23} , h_{31} , h_{32} , h_{33}]^T,则两点的对应可写为:\\ A_{2×9}*h_{9×1}=0 ∵1=h31x+h32y+h33⇒{x1=1x1=h31x+h32y+h33h11x+h12y+h13y1=1y1=h31x+h32y+h33h21x+h22y+h23令A=[−x0−y0−100−x0−y0−1xx1xy1yx1yy1x1y1],h=[h11,h12,h13,h21,h22,h23,h31,h32,h33]T,则两点的对应可写为:A2×9∗h9×1=0
因为齐次坐标(即(x,y,1))来表示平面上的点,aH与H的作用是相同的,所以变换的自由度为8,一对点能产生两个方程,共需要4对对应点,即可求取H矩阵;如超过4对,通过最小二乘法或RANSAC求取最优参数。
A
=
U
∗
Σ
∗
V
T
A=U*\Sigma*V^T
A=U∗Σ∗VT
然后取V的最后一列出来作为求解h。因为矩阵A是行满秩,即只有一个自由度。
[U,S,V]=svd(A);
h=V(:,9);
H= reshape(h,3,3);
实现
function v = homography_solve(pin, pout)
% HOMOGRAPHY_SOLVE finds a homography from point pairs
% V = HOMOGRAPHY_SOLVE(PIN, POUT) takes a 2xN matrix of input vectors and
% a 2xN matrix of output vectors, and returns the homogeneous
% transformation matrix that maps the inputs to the outputs, to some
% approximation if there is noise.
%
% This uses the SVD method of
% http://www.robots.ox.ac.uk/%7Evgg/presentations/bmvc97/criminispaper/node3.html
% David Young, University of Sussex, February 2008
if ~isequal(size(pin), size(pout))
error('Points matrices different sizes');
end
if size(pin, 1) ~= 2
error('Points matrices must have two rows');
end
n = size(pin, 2);
if n < 4
error('Need at least 4 matching points');
end
% Solve equations using SVD
x = pout(1, :); y = pout(2,:); X = pin(1,:); Y = pin(2,:);
rows0 = zeros(3, n);
rowsXY = -[X; Y; ones(1,n)];
hx = [rowsXY; rows0; x.*X; x.*Y; x];
hy = [rows0; rowsXY; y.*X; y.*Y; y];
h = [hx hy];
if n == 4
[U, ~, ~] = svd(h);
else
[U, ~, ~] = svd(h, 'econ');
end
v = (reshape(U(:,9), 3, 3)).';
end

















 3128
3128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









