







自动化、智能化3D检测为目前制造行业发展的必然趋势,在汽车、航空、航天、能源和国防等领域中存在种类众多的零件,接触式测量方法难以满足零件的快速测量需求,而且随着产品的迭代升级,大量个性化的复杂零件需要检测,迫切需要通过非接触光学测量技术完成快速重建,机械臂与面结构光3D扫描仪相结合的自动化三维测量技术,逐渐成为复杂零部件快速批量3D检测重要方案。
新拓三维XTOM-STATION自动化检测中心,采用工业机器人+固定式蓝光三维扫描自动化3D测量解决方案,高效集成了工业机器人和蓝光3D扫描技术的各自优势,可高精度高细节还原度获取工件表面的三维数据,通过与理论数模进行对比,分析出检测工件特定尺寸或缺陷,从而完成生产工件批量化、自动化3D检测,为各种测量任务提供了高效、精确和自动化的解决方案。

亮点1:硬件介绍
自动化、智能化3D检测为目前制造行业发展的必然趋势,在汽车、航空、航天、能源和国防等领域中存在种类众多的零件,接触式测量方法难以满足零件的快速测量需求,而且随着产品的迭代升级,大量个性化的复杂零件需要检测,迫切需要通过非接触光学测量技术完成快速重建,机械臂与面结构光3D扫描仪相结合的自动化三维测量技术,逐渐成为复杂零部件快速批量3D检测重要方案。
新拓三维XTOM-STATION自动化检测中心,采用工业机器人+固定式蓝光三维扫描自动化3D测量解决方案,高效集成了工业机器人和蓝光3D扫描技术的各自优势,可高精度高细节还原度获取工件表面的三维数据,通过与理论数模进行对比,分析出检测工件特定尺寸或缺陷,从而完成生产工件批量化、自动化3D检测,为各种测量任务提供了高效、精确和自动化的解决方案。
亮点1:硬件介绍
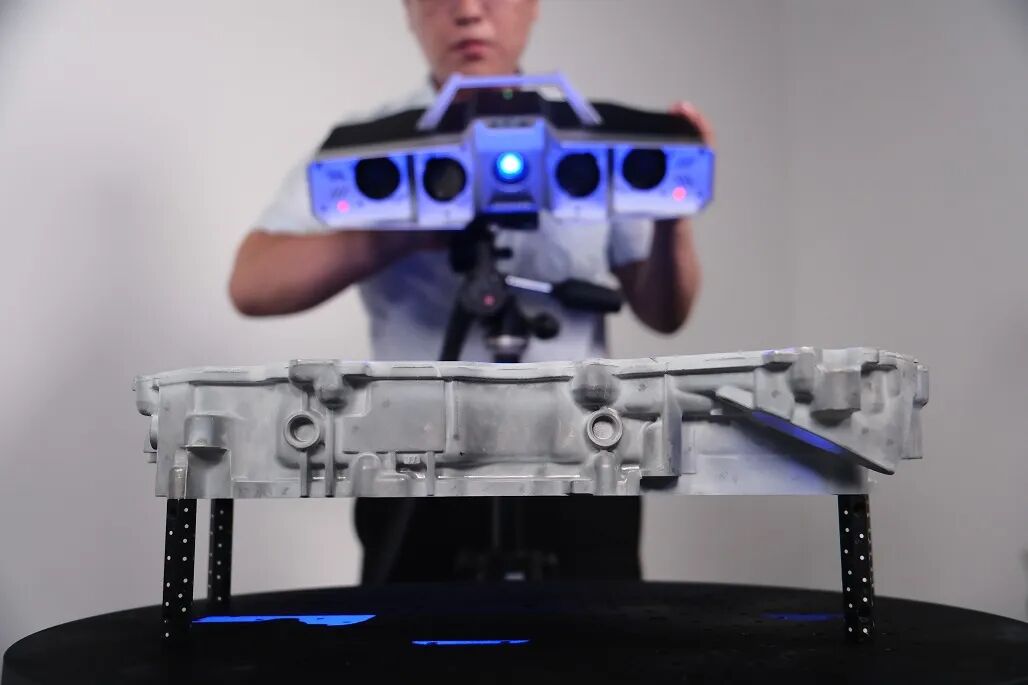
XTOM-12M蓝光三维扫描仪
XTOM-12M微米级精度蓝光三维扫描仪,是自动化3D测量中的重要硬件组成,在精度以及细节还原度上优势明显,精度最高水平在6微米,搭载1230万像素超高分辨率工业相机,点距水平可以到0.021mm。其在精度和细节还原度这两项重要的数据质量参数上,达到了结构光三维扫描设备的行业顶尖水平。
蓝光三维扫描测量技术以其高精度、全尺寸和非接触式的优点,以及更加全面和精确的数据支撑,逐渐成为中小型工件测量的更优选择。例如航空叶片、电子电器结构件,精密注塑,冲压模具等对于精度要求高,且具有较多细微几何特征的工件。
工装简介
通常工业制造中,工件具有种类多、形状不规则等特点,可配备多种类型的工装来对工件进行固定。对于形状不规则或有特殊结构的工件,支持工装定制,确保扫描过程的稳定性和数据质量。
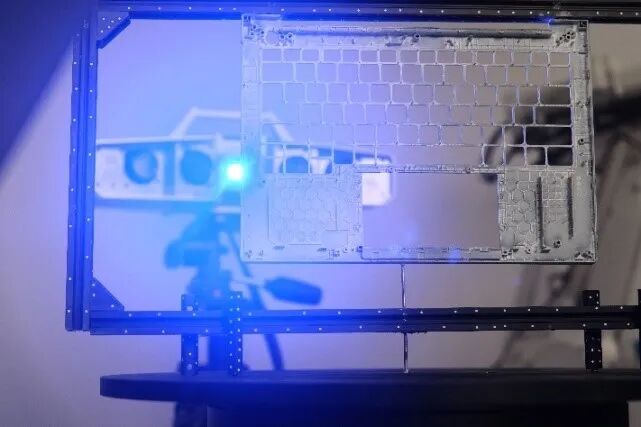
柔性工装
适用于刚性较好、结构稳定小型零部件(如钣金件),柔性工装制成的支撑结构,可适应不同形状的工件,同时避免因刚性固定导致的变形或损伤。
带夹具柔性工装
夹具可精确固定工件位置,确保扫描过程中工件姿态稳定,柔性工装能缓冲夹具对工件的压力,减少变形风险。此类工装可快速定位和固定中型工件,实现高效扫描。
转台或旋转工装
对于需要多角度扫描的工件,转台或旋转工装可实现工件的自动旋转,使蓝光3D扫描仪能够从不同角度获取工件的完整三维数据。转台可根据预设路径和角度进行精确旋转,常用于小型注塑件、电子零部件等的全尺寸检测。
工业机器人简介
XTOM-STATION自动化检测中心使用六轴机器人,工业机器人变位机构同机器人同步运动。
机器人和变位机构具有极高的重复定位精度,保证每一个扫描位置唯一确定,且具有高精度的重复性。据此,每一个扫描位置都可以唯一确定一个世界坐标系下的坐标,从而可以将不同方位的测量数据统一到同一个坐标系下,实现无标拼合。

亮点2:软件介绍
在软件算法上,积累时间越久,三维扫描与点云优化算法体系越成熟,整体的3D数据质量越高,而新拓三维拥有近20年的自主研发技术积累。
三维扫描软件
新拓三维XTOM三维扫描软件,通过核心算法、点云质量,数据后处理等优化,带来更流畅高效的扫描体验,可以在测量过程中根据参考点的精准坐标自动点云拼接,无需担心累计偏差,为极致的细节特征还原和计量级3D检测提供基础。
三维检测软件
新拓三维X-INSPECT三维检测分析软件,可用于将扫描得到的三维数据模型,通过不同对齐方式,与导入的CAD模型或数次扫描均值比对,并对比对结果进行综合注释、尺寸标注、GD&T以及测量分析,并输出详细检测报告。
自动化控制软件
自动化控制程序主要用于机械臂/转台运动控制、3D扫描采集控制、数据解算等。XTOM-STATION自动化软件集成所有功能,可在一个系统中完成自动化检测操作,实现自动路径规划、自动扫描、自动检测,全过程无需人员参与,省时省力省心。
应用案例:工件自动化3D检测
航空叶片自动化3D测量
航空叶片的具有型面复杂、进/排气边半径尺寸微小、薄而扭曲、特征尺寸多、数量庞大、制造检测精度要求高等技术特点。
新拓三维XTOM-STATION自动化检测中心,可实现叶片自动三维测量,基于测量结果可对叶片的弦长、叶厚、叶缘R参数等进行自动分析,判定叶片是否合格。
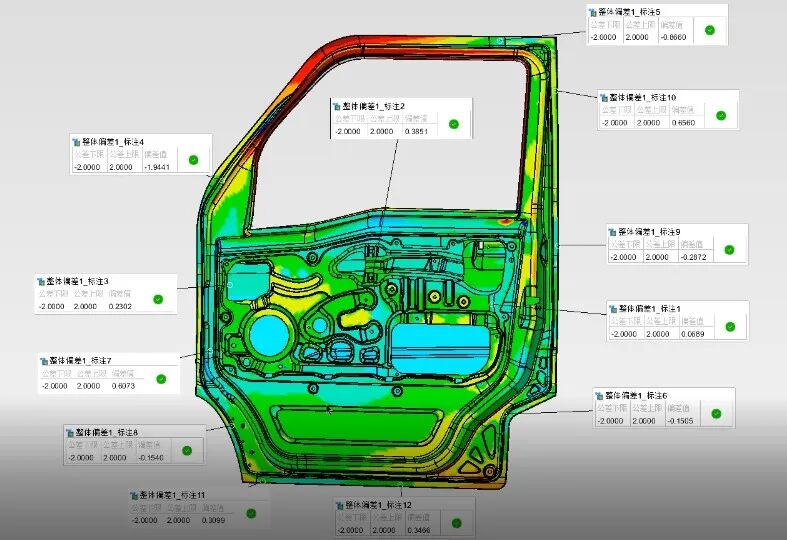
汽车钣金件批量3D测量
新拓三维XTOM-STATION自动化检测中心,可一键自动化扫描和检测, 获取汽车车门钣金件的圆孔、槽孔、边界的清晰3D数据,结合三维检测软件,分析孔位尺寸检测、边界检测、整体偏差检测,圆孔采用灰度特征值算法拟合、检测精度更高。

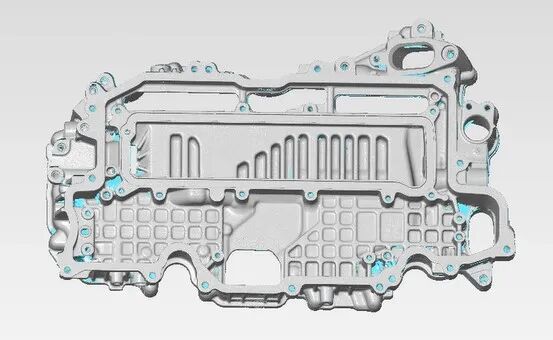
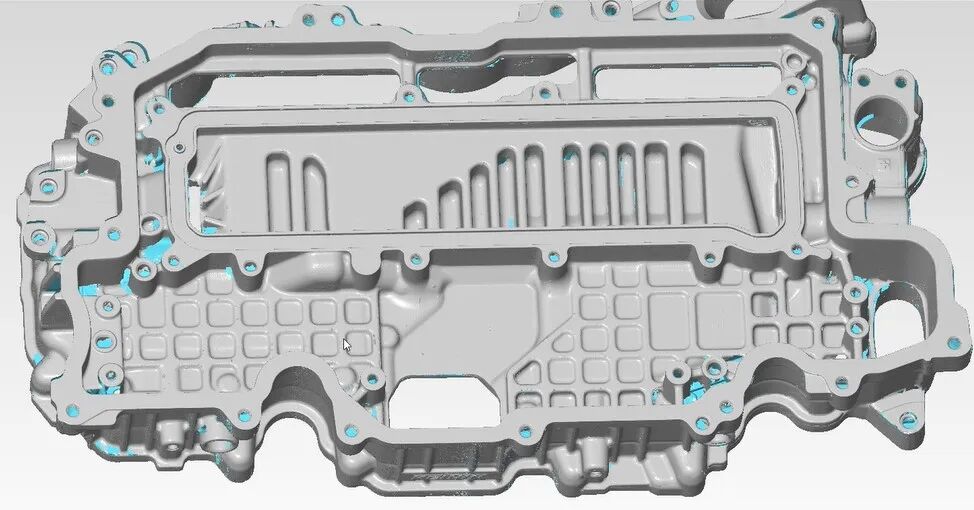
铸件自动化3D测量
铸造行业涉及到大量的模具和铸件生产,随着锻造行业对零件精度要求的不断提升,制造商正致力于生产满足严苛的公差标准的工件。产业升级催生了对于快速、精准且全面的零件检测技术的迫切需求。
XTOM-STATION自动化检测中心,以机器人代替⼈⼯,可针对产品进⾏扫描路径规划,自动完成全⾃动三维扫描和检测⼯作, ⼤⼤提升测量效率,减少⼈⼯和管理成本。
面向复杂零部件的批量检测需求,从以往的抽检变成全检,其检测量有了几何式的增长,因此需要更快速、高效、稳定、自动化程度高的检测方法,以实现不同类型工件的自动化和数字化测量。新拓三维XTOM-STATION自动化检测中心,通过蓝光三维扫描+柔性工装的方式代替部分检具,通过工业机器人进行自动化3D扫描,高效分析检测工件特定尺寸或缺陷,从而完成生产工件的批量化、自动化检测,在成本控制和生产效率方面具有很强优势。
XTOM-12M蓝光三维扫描仪
XTOM-12M微米级精度蓝光三维扫描仪,是自动化3D测量中的重要硬件组成,在精度以及细节还原度上优势明显,精度最高水平在6微米,搭载1230万像素超高分辨率工业相机,点距水平可以到0.021mm。其在精度和细节还原度这两项重要的数据质量参数上,达到了结构光三维扫描设备的行业顶尖水平。
蓝光三维扫描测量技术以其高精度、全尺寸和非接触式的优点,以及更加全面和精确的数据支撑,逐渐成为中小型工件测量的更优选择。例如航空叶片、电子电器结构件,精密注塑,冲压模具等对于精度要求高,且具有较多细微几何特征的工件。
工装简介
通常工业制造中,工件具有种类多、形状不规则等特点,可配备多种类型的工装来对工件进行固定。对于形状不规则或有特殊结构的工件,支持工装定制,确保扫描过程的稳定性和数据质量。
柔性工装
适用于刚性较好、结构稳定小型零部件(如钣金件),柔性工装制成的支撑结构,可适应不同形状的工件,同时避免因刚性固定导致的变形或损伤。
带夹具柔性工装
夹具可精确固定工件位置,确保扫描过程中工件姿态稳定,柔性工装能缓冲夹具对工件的压力,减少变形风险。此类工装可快速定位和固定中型工件,实现高效扫描。
转台或旋转工装
对于需要多角度扫描的工件,转台或旋转工装可实现工件的自动旋转,使蓝光3D扫描仪能够从不同角度获取工件的完整三维数据。转台可根据预设路径和角度进行精确旋转,常用于小型注塑件、电子零部件等的全尺寸检测。
工业机器人简介
XTOM-STATION自动化检测中心使用六轴机器人,工业机器人变位机构同机器人同步运动。
机器人和变位机构具有极高的重复定位精度,保证每一个扫描位置唯一确定,且具有高精度的重复性。据此,每一个扫描位置都可以唯一确定一个世界坐标系下的坐标,从而可以将不同方位的测量数据统一到同一个坐标系下,实现无标拼合。
亮点2:软件介绍
在软件算法上,积累时间越久,三维扫描与点云优化算法体系越成熟,整体的3D数据质量越高,而新拓三维拥有近20年的自主研发技术积累。
三维扫描软件
新拓三维XTOM三维扫描软件,通过核心算法、点云质量,数据后处理等优化,带来更流畅高效的扫描体验,可以在测量过程中根据参考点的精准坐标自动点云拼接,无需担心累计偏差,为极致的细节特征还原和计量级3D检测提供基础。
三维检测软件
新拓三维X-INSPECT三维检测分析软件,可用于将扫描得到的三维数据模型,通过不同对齐方式,与导入的CAD模型或数次扫描均值比对,并对比对结果进行综合注释、尺寸标注、GD&T以及测量分析,并输出详细检测报告。
自动化控制软件
自动化控制程序主要用于机械臂/转台运动控制、3D扫描采集控制、数据解算等。XTOM-STATION自动化软件集成所有功能,可在一个系统中完成自动化检测操作,实现自动路径规划、自动扫描、自动检测,全过程无需人员参与,省时省力省心。
应用案例:工件自动化3D检测
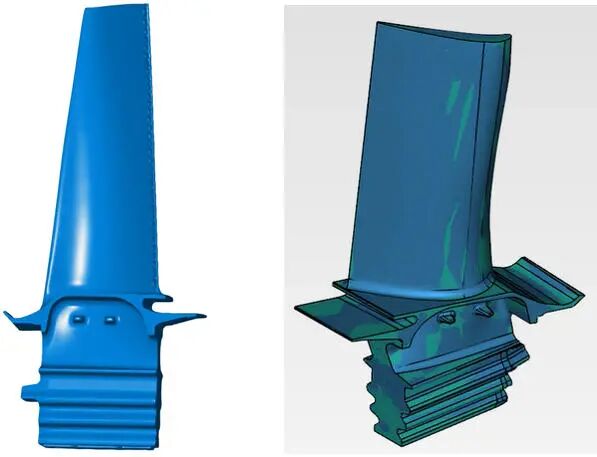
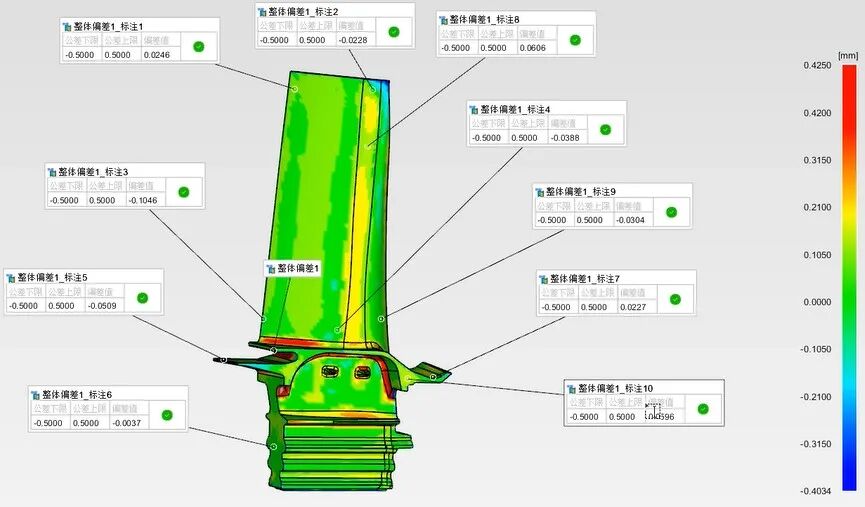
航空叶片自动化3D测量
航空叶片的具有型面复杂、进/排气边半径尺寸微小、薄而扭曲、特征尺寸多、数量庞大、制造检测精度要求高等技术特点。
新拓三维XTOM-STATION自动化检测中心,可实现叶片自动三维测量,基于测量结果可对叶片的弦长、叶厚、叶缘R参数等进行自动分析,判定叶片是否合格。
汽车钣金件批量3D测量
新拓三维XTOM-STATION自动化检测中心,可一键自动化扫描和检测, 获取汽车车门钣金件的圆孔、槽孔、边界的清晰3D数据,结合三维检测软件,分析孔位尺寸检测、边界检测、整体偏差检测,圆孔采用灰度特征值算法拟合、检测精度更高。
铸件自动化3D测量
铸造行业涉及到大量的模具和铸件生产,随着锻造行业对零件精度要求的不断提升,制造商正致力于生产满足严苛的公差标准的工件。产业升级催生了对于快速、精准且全面的零件检测技术的迫切需求。
XTOM-STATION自动化检测中心,以机器人代替⼈⼯,可针对产品进⾏扫描路径规划,自动完成全⾃动三维扫描和检测⼯作, ⼤⼤提升测量效率,减少⼈⼯和管理成本。
面向复杂零部件的批量检测需求,从以往的抽检变成全检,其检测量有了几何式的增长,因此需要更快速、高效、稳定、自动化程度高的检测方法,以实现不同类型工件的自动化和数字化测量。新拓三维XTOM-STATION自动化检测中心,通过蓝光三维扫描+柔性工装的方式代替部分检具,通过工业机器人进行自动化3D扫描,高效分析检测工件特定尺寸或缺陷,从而完成生产工件的批量化、自动化检测,在成本控制和生产效率方面具有很强优势。

















 2063
2063

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









