







近年来,集成在曲面的共形电子电路因其在健康监测与诊断、运动传感、可穿戴设备、天线以及光电子器件等领域的广泛应用而备受关注。
增材制造技术能够接在曲面上打印,为电路设计提供了更大的灵活性,并能更好地适应复杂的表面拓扑结构。采用创新的电液动力学(EHD)打印策略,能够在各种曲面上直接打印出具有微米级分辨率和高均匀性的导电电路。
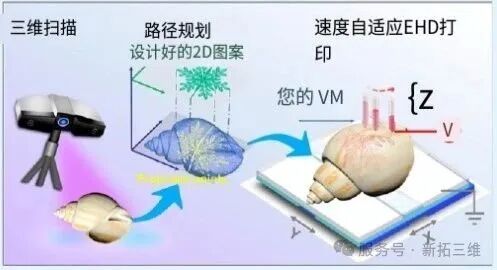
采用新拓三维XTOM高精度蓝光三维扫描仪,可从扫描的高质量三维点云中,获取电路表面的曲面形态与表面形态3D点云数据,根据曲面的曲率提升打印精度,有助于在曲率范围为10至2000m-1的不同表面上均匀地EHD打印线宽为39.31±4.06微米的导电图案。

XTOM高精度蓝光三维扫描仪,可用于高效获取自由曲面的3D点云数据,基于3D点云数据,结合Python软件进行导电特征的后续设计和路径规划。蓝光3D扫描、路径规划和速度自适应电液动力打印的集成方法,能够直接在各种曲面上打印出具有微米级分辨率和高均匀性的导电电路。
在现有的诸如喷墨或挤出式打印等技术,无法在具有曲率变化的直由曲面上沉积出微来级的贴合导电电路。
1、采用一种创新的电液动力学(EHD)打印策略,可根据曲面的曲率,自适应地调整喷嘴与基底的距离以及打印速度,直接在各种由面打印出具有微采级分辨率和高均匀性的导电电路。
2、开发了一种路径规划算法,该算法能够根据曲面的曲率变化来规划打印路径,从实现高精度的曲面导电电路打印。
作为概念验证,在直然绝缘的海螺壳上EHD打印出具有良好导电性的均匀雪化图案,最小线宽为35.74±4.24微米。
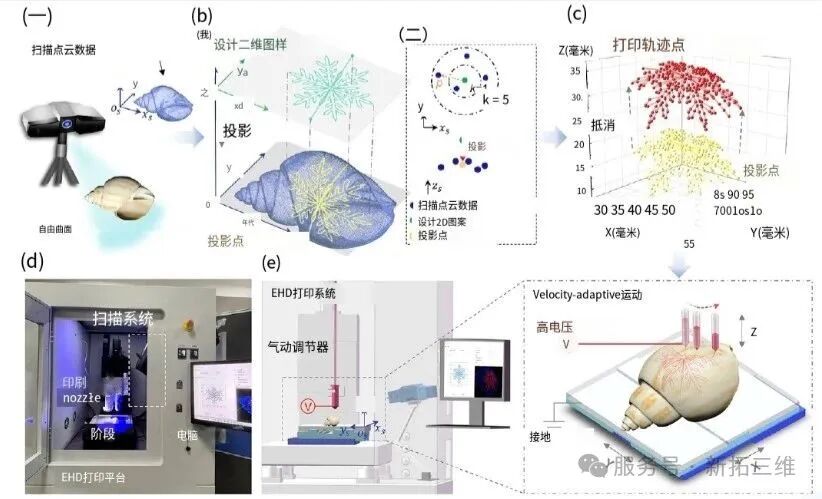
图1.在不同曲面目标上进行共形EHD打印的3D路径规划和平台设置流程图。
(a)对自由曲面进行3D扫描以获取代表目标表面信息的点云数据。(b)使用KNN算法将设计的2D图案投影到目标表面以获得相应的投影3D点(i)(ii)的示意图。(c)将投影点偏移为EHD打印的轨迹点。(d)共形EHD打印平台和(e)在海螺表面制造导电图案的自适应速度共形EHD打印策略示意图。
自由曲面的共形EHD打印三维路径规划
路径规划对于在EHD制造过程中,建立从采用XTOM蓝光三维扫描仪获得的3D数据模型曲面信息与实际打印轨迹之间的联系至关重要。
上图展示了通过蓝光3D扫描和路径规划,在自由曲面进行共形EHD打印的关键步骤。
-
使用新拓三维XTOM高精度蓝光3D扫描仪,快速获取目标曲面(即基底)的形态。
-
将扫描的表面数据转换为3D点云数据,以在投影三维坐标系中描述曲面基底的信息。
-
在扫描模型的顶面构建二维平面,用一组分散的点定义二维图案,然后通过KNN算法将这些点投影到曲面上,该算法通过调整参数将二维数据映射到二维坐标。
-
对预测的点进行偏移,以生成最终的打印轨迹点-作为在各种基底上进行共形EHD打印的路径。共形EHD打印平台,在各种基底上打印各种复杂自由曲面螺面图案。
优化工艺参数提升EHD打印精度
优化诸如投影点数量以及路径规划相关的KNN算法参数等工艺参数,对于确保电液动力EHD打印精度和效率至关重要。
· 点云数据采集
采用XTOM高精度蓝光三维扫描仪,获取高密度扫描点数据集作为训练数据集,设计的二维图案点作为测试数据集,用于KNN算法训练,用于打印路径规划中的优化。
· 投影点数量
采用蓝光三维扫描技术获取点云数据,通过在扫描路径中优化投影点数量,提升打印的图案保真度和移动平台的稳定性。
· 打印雪花图案
通过优化在曲面进行电液喷射(EHD)打印的阈值,以恒定的10毫米/秒的打印速度,电液喷射打印出了连续性和高保真度的雪花图案。
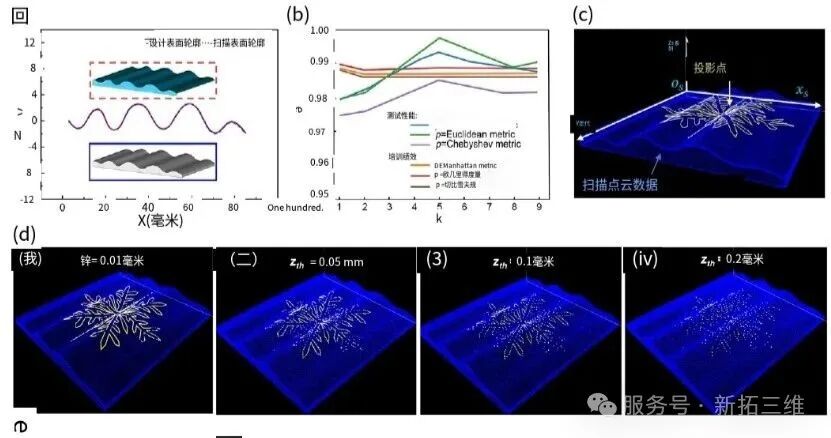
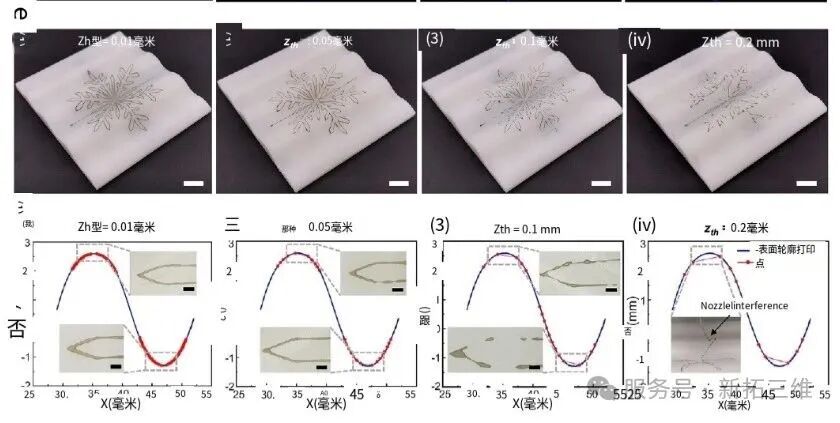
图2.基于所选阈值路径规划算法中投影敎据的优化,以实现EHD在自由曲面上打印高保真图案的同时保持移动平台的稳定定性
(a)设计的和扫描的目标曲面轮廓的比较。(b)使用不同度量标准对测试性能和训练性能进行的精度比较。(c)基于优化的KNN算法获取的雪花图案的投影点。(d)不同阈值设置的打印路径投影点。(e)在四种不同阈值下的EHD打印雪花图案。(f)在四种不同阈值下轨迹点对曲面的适应性。比例尺:1亳米。
在电子打印领域,3D扫描技术主要与直接墨水写(DIW)工艺相结合,在曲面上制造贴合电路。然后,通过直接墨水书写工艺贴合的电路,分辨率通常大于1毫米。3D扫描与直接激光书写相结合,可以制作出线宽最小为100微米的贴合电路。
采用新拓三维XTOM高精度蓝光三维扫描仪,与路径规划/速度自适应电液动力打印的集成方法,可直接在各种曲面上打印出具有微米级分辨率和高均匀性的导电电路。随着电液喷射打印技术的进一步发展,有望简化弯曲功能器件的制造工艺,为具有电磁调节等更具复杂功能的先进三维电子器件铺平道路。
案例摘自:【岳俊宇,西安交通大学制造系统工程国家重点实验室 面向自由曲面微尺度共形电路的流速自适应电液喷印技术】

















 771
771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









