




作者:张凯成
原文:https://zhuanlan.zhihu.com/p/1911487456173359632
TL;DR
我们提出了GVPO,优势:(1)唯一最优解恰好是KL约束的reward最大化最优解(2)支持多样化采样分布,避免on-policy和重要性采样带来的各种问题。
随着Deepseek的火爆,其中用到的强化学习算法GRPO也引起了广泛关注。GRPO通过对每一个prompt多次采样,避免了额外训练value model的开销。尽管如此,实践中复现GRPO经常表现出训练不稳定、效果表现不佳等症状。为此我们提出了GVPO(Group Variance Policy Optimization), 可以无缝适配现有GRPO框架并取得更好的表现、更稳定的训练并支持更丰富的数据来源。
动机
受到DPO的启发,我们也希望在GRPO场景(每个prompt多次采样)下利用KL约束的reward最大化
maxπθEx∼D,y∼πθ(y∣x)[R(x,y)]−βDKL[πθ(y∣x)∣∣πθ′(y∣x)] max_{\pi_{\theta}} \mathbb{E}_{x\sim\mathcal{D},y\sim\pi_\theta(y|x)}[R(x,y)]-\beta\mathbb{D}_{KL}[\pi_\theta(y|x)||\pi_{\theta^\prime}(y|x)] maxπθEx∼D,y∼πθ(y∣x)[R(x,y)]−βDKL[πθ(y∣x)∣∣πθ′(y∣x)]
的解析解形式:
Rθ(x,y)=βlogπθ(y∣x)πθ′(y∣x)+βlogZ(x) R_\theta(x,y)=\beta \log\frac{\pi_\theta(y|x)}{\pi_{\theta^\prime}(y|x)}+\beta \log Z(x) Rθ(x,y)=βlogπθ′(y∣x)πθ(y∣x)+βlogZ(x)
然而这里有一个问题在于公式里的Z(x)是对所有可能y的期望,在实践中难以计算。为此,我们发现当一个prompt内所有采样的梯度系数加和为0时,Z(x)可以被消掉。
即对于
∇θL(θ)=−∑(x,y1,y2,..,yk)∈D∑i=1kwi∇θlogπθ(yi∣x) \nabla_\theta\mathcal{L}(\theta) = -\sum_{(x, y_1,y_2,..,y_k) \in \mathcal{D}} \sum_{i=1}^k w_i \nabla_\theta\log \pi_\theta(y_i|x) ∇θL(θ)=−(x,y1,y2,..,yk)∈D∑i=1∑kwi∇θlogπθ(yi∣x)
当
∑i=1kwi=0时有∑i=1kwiRθ(x,y)=∑i=1kwiβlogπθ(y∣x)πθ′(y∣x) \sum_{i=1}^k w_i=0 时有 \sum_{i=1}^k w_iR_\theta(x,y)=\sum_{i=1}^k w_i\beta \log\frac{\pi_\theta(y|x)}{\pi_{\theta^\prime}(y|x)} i=1∑kwi=0时有i=1∑kwiRθ(x,y)=i=1∑kwiβlogπθ′(y∣x)πθ(y∣x)
GVPO
受此启发,我们提出了GVPO:
∇θLGVPO(θ)
\nabla_\theta\mathcal{L}_{\text{GVPO}}(\theta)
∇θLGVPO(θ)
=−β∑(x,{yi})∈D∑i=1k[(R(x,yi)−R(x,{yi}‾)−β(logπθ(yi∣x)πθ′(yi∣x)−logπθ({yi}∣x)πθ′({yi}∣x)‾)]∇θlogπθ(yi∣x)
=-\beta\sum_{(x, \{y_i\}) \in \mathcal{D}} \sum_{i=1}^k [(R(x,y_i)-\overline{R(x,\{y_i\}})-\beta(\log\frac{\pi_\theta(y_i|x)}{\pi_{\theta^\prime}(y_i|x)} - \overline{\log\frac{\pi_\theta(\{y_i\}|x)}{\pi_{\theta^\prime}(\{y_i\}|x)}})] \nabla_\theta\log \pi_\theta(y_i|x)
=−β(x,{yi})∈D∑i=1∑k[(R(x,yi)−R(x,{yi})−β(logπθ′(yi∣x)πθ(yi∣x)−logπθ′({yi}∣x)πθ({yi}∣x))]∇θlogπθ(yi∣x)
其中
R(x,{yi}‾)=1k∑i=1kR(x,yi),logπθ({yi}∣x)πθ′({yi}∣x)‾=1k∑i=1klogπθ(yi∣x)πθ′(yi∣x) \overline{R(x,\{y_i\}})=\frac{1}{k}\sum_{i=1}^k R(x,y_i),\overline{\log\frac{\pi_\theta(\{y_i\}|x)}{\pi_{\theta^\prime}(\{y_i\}|x)}}=\frac{1}{k}\sum_{i=1}^k\log\frac{\pi_\theta(y_i|x)}{\pi_{\theta^\prime}(y_i|x)} R(x,{yi})=k1i=1∑kR(x,yi),logπθ′({yi}∣x)πθ({yi}∣x)=k1i=1∑klogπθ′(yi∣x)πθ(yi∣x)
我们证明GVPO具有非常好的物理性质。具体来说
∇θLGVPO(θ)
\nabla_\theta\mathcal{L}_{\text{GVPO}}(\theta)
∇θLGVPO(θ)
=−∑x,{yi}∑i=1k[(R(x,yi)−R(x,{yi}‾)−(Rθ(x,yi)−Rθ(x,{yi}‾)]∇θβlogπθ(yi∣x)
=-\sum_{x, \{y_i\}} \sum_{i=1}^k [(R(x,y_i)-\overline{R(x,\{y_i\}})-(R_\theta(x,y_i)-\overline{R_\theta(x,\{y_i\}})] \nabla_\theta \beta\log \pi_\theta(y_i|x)
=−x,{yi}∑i=1∑k[(R(x,yi)−R(x,{yi})−(Rθ(x,yi)−Rθ(x,{yi})]∇θβlogπθ(yi∣x)
=−∑x,{yi}∑i=1k[(R(x,yi)−R(x,{yi}‾)−(Rθ(x,yi)−Rθ(x,{yi}‾)]∇θ(Rθ(x,yi)−Rθ(x,{yi}‾)
=-\sum_{x, \{y_i\} } \sum_{i=1}^k [(R(x,y_i)-\overline{R(x,\{y_i\}})-(R_\theta(x,y_i)-\overline{R_\theta(x,\{y_i\}})] \nabla_\theta(R_\theta(x,y_i)-\overline{R_\theta(x,\{y_i\}})
=−x,{yi}∑i=1∑k[(R(x,yi)−R(x,{yi})−(Rθ(x,yi)−Rθ(x,{yi})]∇θ(Rθ(x,yi)−Rθ(x,{yi})
=12∇θ∑x,{yi}∑i=1k[(Rθ(x,yi)−Rθ(x,{yi}‾)−(R(x,yi)−R(x,{yi}‾)]2
=\frac{1}{2}\nabla_\theta\sum_{x, \{y_i\} } \sum_{i=1}^k [(R_\theta(x,y_i)-\overline{R_\theta(x,\{y_i\}})-(R(x,y_i)-\overline{R(x,\{y_i\}})]^2
=21∇θx,{yi}∑i=1∑k[(Rθ(x,yi)−Rθ(x,{yi})−(R(x,yi)−R(x,{yi})]2
第一步是因为 βlogZ(x)\beta\log Z(x)βlogZ(x) 可以被消掉。第二步是因为 ∑i=1kwi∇θR(x,{yi})‾=0\sum_{i=1}^k w_i \nabla_\theta \overline{R(x,\{y_i\})} =0∑i=1kwi∇θR(x,{yi})=0 。第三步是因为 ∇xf(x)2=2f(x)∇xf(x)\nabla_xf(x)^2=2f(x)\nabla_xf(x)∇xf(x)2=2f(x)∇xf(x) 。
由此可见,GVPO居然本质是一个MSE loss!(喜)其中 (Rθ(x,yi)−Rθ(x,{yi}‾)(R_\theta(x,y_i)-\overline{R_\theta(x,\{y_i\}})(Rθ(x,yi)−Rθ(x,{yi}) 是MSE的预测值, (R(x,yi)−R(x,{yi}‾)(R(x,y_i)-\overline{R(x,\{y_i\}})(R(x,yi)−R(x,{yi}) 是MSE的真实值。
理论保证
基于这个变形,我们很容易(注意到.jpg)证明GVPO的理论最优解恰好是KL约束的reward最大化的最优解,即 Rθ=R,πθ=π∗R_\theta=R, \pi_\theta=\pi^*Rθ=R,πθ=π∗ 。
定理1
最小化 L^GVPO(θ)\hat{\mathcal{L}}_{\text{GVPO}}(\theta)L^GVPO(θ) 的唯一policy是 πθ(y∣x)=π∗(y∣x)=1Z(x)πθ′(y∣x)eR(x,y)/β\pi_\theta (y|x)=\pi^* (y|x)= \frac{1}{Z(x)}\pi_{\theta^\prime}(y|x)e^{R(x,y)/\beta}πθ(y∣x)=π∗(y∣x)=Z(x)1πθ′(y∣x)eR(x,y)/β ,其中
L^GVPO(θ)=Ex∼DEy∼πθ′(⋅∣x)[(Rθ(x,y)−Ey∼πθ′Rθ(x,y))−(R(x,y)−Ey∼πθ′R(x,y))]2 \hat{\mathcal{L}}_{\text{GVPO}}(\theta)= \mathbb{E}_{x \sim \mathcal{D}} \mathbb{E}_{y \sim \pi_{\theta^\prime}(\cdot|x)}[(R_\theta(x,y)- \mathbb{E}_{y \sim \pi_{\theta^\prime}}R_\theta(x,y))-(R(x,y)- \mathbb{E}_{y \sim \pi_{\theta^\prime}}R(x,y))]^2 L^GVPO(θ)=Ex∼DEy∼πθ′(⋅∣x)[(Rθ(x,y)−Ey∼πθ′Rθ(x,y))−(R(x,y)−Ey∼πθ′R(x,y))]2
这个定理保证了GVPO实践中的有效性和稳定性。
上式中 y 是依惯例从要对齐的policy πθ′\pi_{\theta^\prime}πθ′ 中采样,在实践中即 πref或πθold\pi_{ref} 或 \pi_{\theta_{old}}πref或πθold 。我们接下来可以证明,GVPO支持从更广泛的分布中采样,且依然保持最优解性质。
定理2
最小化 L^GVPO(θ)\hat{\mathcal{L}}_{\text{GVPO}}(\theta)L^GVPO(θ) 的唯一policy是 $\pi_\theta (y|x)=\pi^* (y|x)= \frac{1}{Z(x)}\pi_{\theta\prime}(y|x)e{R(x,y)/\beta} $ ,其中
L^GVPO(θ)=Ex∼DEy∼πs(⋅∣x)[(Rθ(x,y)−Ey∼πsRθ(x,y))−(R(x,y)−Ey∼πsR(x,y))]2 \hat{\mathcal{L}}_{\text{GVPO}}(\theta)= \mathbb{E}_{x \sim \mathcal{D}} \mathbb{E}_{y \sim \pi_{s}(\cdot|x)}[(R_\theta(x,y)- \mathbb{E}_{y \sim \pi_{s}}R_\theta(x,y))-(R(x,y)- \mathbb{E}_{y \sim \pi_{s}}R(x,y))]^2 L^GVPO(θ)=Ex∼DEy∼πs(⋅∣x)[(Rθ(x,y)−Ey∼πsRθ(x,y))−(R(x,y)−Ey∼πsR(x,y))]2
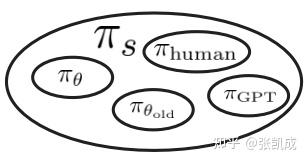
对于满足 πs(y∣x)>0\pi_s(y|x)>0πs(y∣x)>0 的任意 πs\pi_sπs 都成立。
在实践中由softmax decoding的policy都满足这个定理的要求。这意味着,GVPO支持非常广泛的采样分布:
接下来我们正式展示GVPO的算法流程:
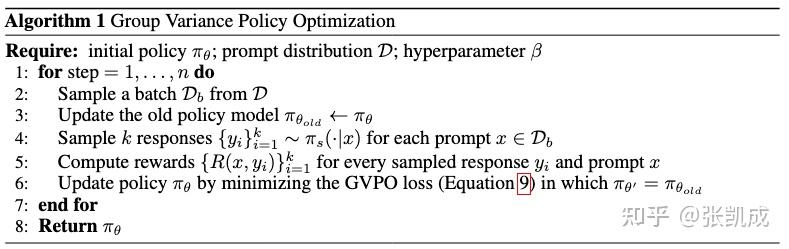
注意到GVPO的每个step中, πθ\pi_\thetaπθ 对齐的都是上一个step的policy πθold\pi_{\theta_{old}}πθold 。我们还证明了,GVPO在n步结束后,依然能够对齐最初的policy:
定理3
使用 L^GVPO(θt)\hat{\mathcal{L}}_{\text{GVPO}}(\theta_t)L^GVPO(θt) 的n步算法——从 πθ0\pi_{\theta_0}πθ0 开始,在第t步更新时设置 πθ′=πθt−1\pi_{\theta'} = \pi_{\theta_{t-1}}πθ′=πθt−1 ——最大化了如下目标
Ex∼D,y∼πθ(y∣x)[R(x,y)]−βnDKL[πθ(y∣x)∥πθ0(y∣x)] \mathbb{E}_{x\sim\mathcal{D}, y\sim\pi_\theta(y|x)}[R(x,y)] - \frac{\beta}{n}\mathbb{D}_{\text{KL}}[\pi_\theta(y|x) \| \pi_{\theta_0}(y|x)] Ex∼D,y∼πθ(y∣x)[R(x,y)]−nβDKL[πθ(y∣x)∥πθ0(y∣x)]
定理3可以保证GVPO的每一步更新都是稳定的(因为具有一个大约束 β\betaβ ),且最终优化可以“走得更远”(最终对齐的是 βn\frac{\beta}{n}nβ )。
除此之外,文章中还证明了采样得到的loss是 L^GVPO\hat{\mathcal{L}}_{\text{GVPO}}L^GVPO 的无偏一致估计量,进一步保证了算法的性能。
与DPO的比较
GVPO与DPO一样,都利用到了KL约束的reward最大化的解析解。DPO是利用BT模型,两两相减消去了不可计算的 Z(x) 。而GVPO则是利用了 ∑i=1kwi=0\sum_{i=1}^k w_i=0∑i=1kwi=0 的性质而适用于多response的情况。这两个算法利用解析解带来了两个好处:
- 保证了算法优化过程的稳定性, πθ\pi_\thetaπθ 不会过分偏离 πref\pi_{ref}πref
- 将一个同时有policy π\piπ 和reward R 的复杂优化,简化成了只有reward R 和 RθR_\thetaRθ 的简单优化。
除此之外,GVPO和DPO相比还有一个重要的理论优势。DPO其实不一定具有唯一的最优解,换句话说KL约束的reward最大化的解可能只是DPO众多最优解中的一个。这源于DPO依赖的BT模型的内生缺陷。这个问题会导致,优化DPO目标不一定会随之优化我们真实想要的目标(即KL约束的reward最大化)。而GVPO则由定理1证明了其唯一解的性质。
与GRPO及Policy Gradient Methods比较
我们先比较GVPO与其余算法的结构相似性。为了简洁我们在这一节假设 β=1\beta=1β=1 。我们将 L^GVPO\hat{\mathcal{L}}_{\text{GVPO}}L^GVPO 展开并稍作变换可以得到其在梯度上等价于
−2Ex,y[(R(x,y)−EyR(x,y))logπθ(y∣x)+Cov(logπθ,logπθ′)−0.5Var(logπθ)] -2\mathbb{E}_{x,y} [{(R(x,y) - \mathbb{E}_y R(x,y))\log\pi_\theta(y|x)}+{Cov(\log\pi_\theta,\log\pi_{\theta^\prime})}- {0.5Var(\log\pi_\theta)}] −2Ex,y[(R(x,y)−EyR(x,y))logπθ(y∣x)+Cov(logπθ,logπθ′)−0.5Var(logπθ)]
其中
Var(logπθ)=(logπθ(y∣x)−Eylogπθ(y∣x))2,Cov(logπθ,logπθ′)=(logπθ(y∣x)−Eylogπθ(y∣x))(logπθ′(y∣x)−Eylogπθ′(y∣x)) Var(\log\pi_\theta)=(\log\pi_\theta(y|x)-\mathbb{E}_y\log\pi_\theta(y|x))^2 , Cov(\log\pi_\theta,\log\pi_{\theta^\prime})=(\log\pi_\theta(y|x)-\mathbb{E}_y\log\pi_\theta(y|x))(\log\pi_{\theta^\prime}(y|x)-\mathbb{E}_y\log\pi_{\theta^\prime}(y|x)) Var(logπθ)=(logπθ(y∣x)−Eylogπθ(y∣x))2,Cov(logπθ,logπθ′)=(logπθ(y∣x)−Eylogπθ(y∣x))(logπθ′(y∣x)−Eylogπθ′(y∣x))
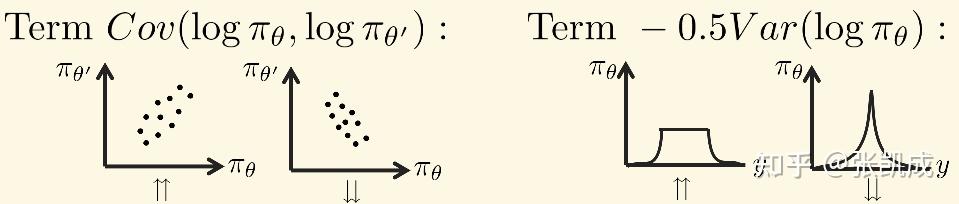
可以发现GVPO的loss里一共有三项:
- (R(x,y)−EyR(x,y))logπθ(y∣x){(R(x,y) - \mathbb{E}_y R(x,y))\log\pi_\theta(y|x)}(R(x,y)−EyR(x,y))logπθ(y∣x) 鼓励了最大化advantage。这在GRPO里的对应是标准化分数后的rewards。
- Cov(logπθ,logπθ′)Cov(\log\pi_\theta,\log\pi_{\theta^\prime})Cov(logπθ,logπθ′) 限制了 πθ\pi_\thetaπθ 不能过分偏离 πθold\pi_{\theta_{old}}πθold ,对应于 DKL[πθ(y∣x)∣∣πθ′(y∣x)]\mathbb{D}_{KL}[\pi_\theta(y|x)||\pi_{\theta^\prime}(y|x)]DKL[πθ(y∣x)∣∣πθ′(y∣x)] 。此外,在GVPO算法实现里设置了 πθ′=πθold\pi_{\theta^\prime}=\pi_{\theta_{old}}πθ′=πθold ,实际上对应了PPO和TRPO的trust-region限制,这保证了policy在更新过程中的稳定性。
- Var(logπθ)Var(\log\pi_\theta)Var(logπθ) 平衡了探索exploration与利用exploitation。这一项对应于熵正则 −Eylogπ(y∣x)-\mathbb{E}_y\log\pi(y|x)−Eylogπ(y∣x) 。增加熵鼓励更多的探索性,分布会趋于均匀分布。但可能会限制高质量response的概率。反之,减少熵加速了收敛,但会在多样性上带来问题。因此,实践中如何决定熵正则的系数十分困难和敏感。而 Var(logπθ)Var(\log\pi_\theta)Var(logπθ) 先天的支持将低质量的response概率为0而高质量的response概率尽可能接近。即概率分布可以呈现蛋糕状(cake is not a lie!)。
我们进一步比较GVPO和Policy Gradient Methods更深层次的区别。实践中,Policy Gradient Methods为了保证更新的稳定性,会在最大化reward的过程中使用KL散度的惩罚限制 πθ\pi_\thetaπθ 偏离 πθold\pi_{\theta_{old}}πθold 的程度,即:
∇θ[Ex,y∼πθ(y∣x)[R(x,y)]−DKL[πθ∣∣πθold]]
\nabla_\theta[\mathbb{E}_{x,y\sim\pi_\theta(y|x)}[R(x,y)]-\mathbb{D}_{\text{KL}}[\pi_\theta||\pi_{\theta_{\text{old}}}]]
∇θ[Ex,y∼πθ(y∣x)[R(x,y)]−DKL[πθ∣∣πθold]]
=Ex,y∼πθ(y∣x)(R(x,y)−logπθ(y∣x)πθold(y∣x))∇θlogπθ(y∣x)
= \mathbb{E}_{x,y\sim\pi_\theta(y|x)}(R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)}) \nabla_\theta \log \pi_\theta(y|x)
=Ex,y∼πθ(y∣x)(R(x,y)−logπθold(y∣x)πθ(y∣x))∇θlogπθ(y∣x)
这带来一个问题,即必须从当前的policy πθ\pi_\thetaπθ 中采样,带来低采样效率的问题。作为一种解决方式,可以引入重要性采样:
=Ex,y∼πθold(y∣x)πθ(y∣x)πθold(y∣x)(R(x,y)−logπθ(y∣x)πθold(y∣x))∇θlogπθ(y∣x) =\mathbb{E}_{x,y\sim\pi_{\theta_{\text{old}}}(y|x)}\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)}\left(R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)} \right) \nabla_\theta \log \pi_\theta(y|x) =Ex,y∼πθold(y∣x)πθold(y∣x)πθ(y∣x)(R(x,y)−logπθold(y∣x)πθ(y∣x))∇θlogπθ(y∣x)
重要性采用使得可以从之前的policy πθold\pi_{\theta_{old}}πθold 中采样。然而其中带来了重要性采样系数 πθ(y∣x)πθold(y∣x)\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)}πθold(y∣x)πθ(y∣x) ,当 πθ\pi_\thetaπθ 和 πθold\pi_{\theta_{old}}πθold 差别较大时会带来梯度爆炸或者梯度消失等问题。PPO和GRPO等算法在实践中采用了clip技术,强制限制重要性采样系数不要过大或过小。但因此,clip会导致无偏性消失并带来各种各样的问题。
作为对比,GVPO就没有这些问题,因为GVPO从一开始就不需要on- policy采样。将上述Policy Gradient Methods内减去一个常数可以得到:
Ex,y∼πθ(y∣x)[R(x,y)−logπθ(y∣x)πθold(y∣x)−Ey∼πθ(y∣x)(R(x,y)−logπθ(y∣x)πθold(y∣x))]∇θlogπθ(y∣x) \mathbb{E}_{x,y\sim{\pi_\theta}(y|x)}\left[R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)} - \mathbb{E}_{y\sim{\pi_\theta}(y|x)}\left(R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)}\right)\right] \nabla_\theta \log \pi_\theta(y|x) Ex,y∼πθ(y∣x)[R(x,y)−logπθold(y∣x)πθ(y∣x)−Ey∼πθ(y∣x)(R(x,y)−logπθold(y∣x)πθ(y∣x))]∇θlogπθ(y∣x)
作为对比,GVPO的梯度是:
Ex,y∼πs(y∣x)[R(x,y)−logπθ(y∣x)πθold(y∣x)−Ey∼πs(y∣x)(R(x,y)−logπθ(y∣x)πθold(y∣x))]∇θlogπθ(y∣x) \mathbb{E}_{x,y\sim{\pi_s}(y|x)}\left[R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)} - \mathbb{E}_{y\sim{\pi_s}(y|x)}\left(R(x,y)-\log\frac{\pi_\theta(y|x)}{\pi_{\theta_{\text{old}}}(y|x)}\right)\right] \nabla_\theta \log \pi_\theta(y|x) Ex,y∼πs(y∣x)[R(x,y)−logπθold(y∣x)πθ(y∣x)−Ey∼πs(y∣x)(R(x,y)−logπθold(y∣x)πθ(y∣x))]∇θlogπθ(y∣x)
由此可见带KL约束的Policy Gradient Methods其实是GVPO当 πs=πθ\pi_s=\pi_\thetaπs=πθ 的一种特例!这也体现出GVPO能将采样分布 πs\pi_sπs 解耦带来的优势:一方面避免了on-policy样本利用率低的缺点,另一方面也避免了现有off-policy方法的重要性采样带来的缺点。
总结
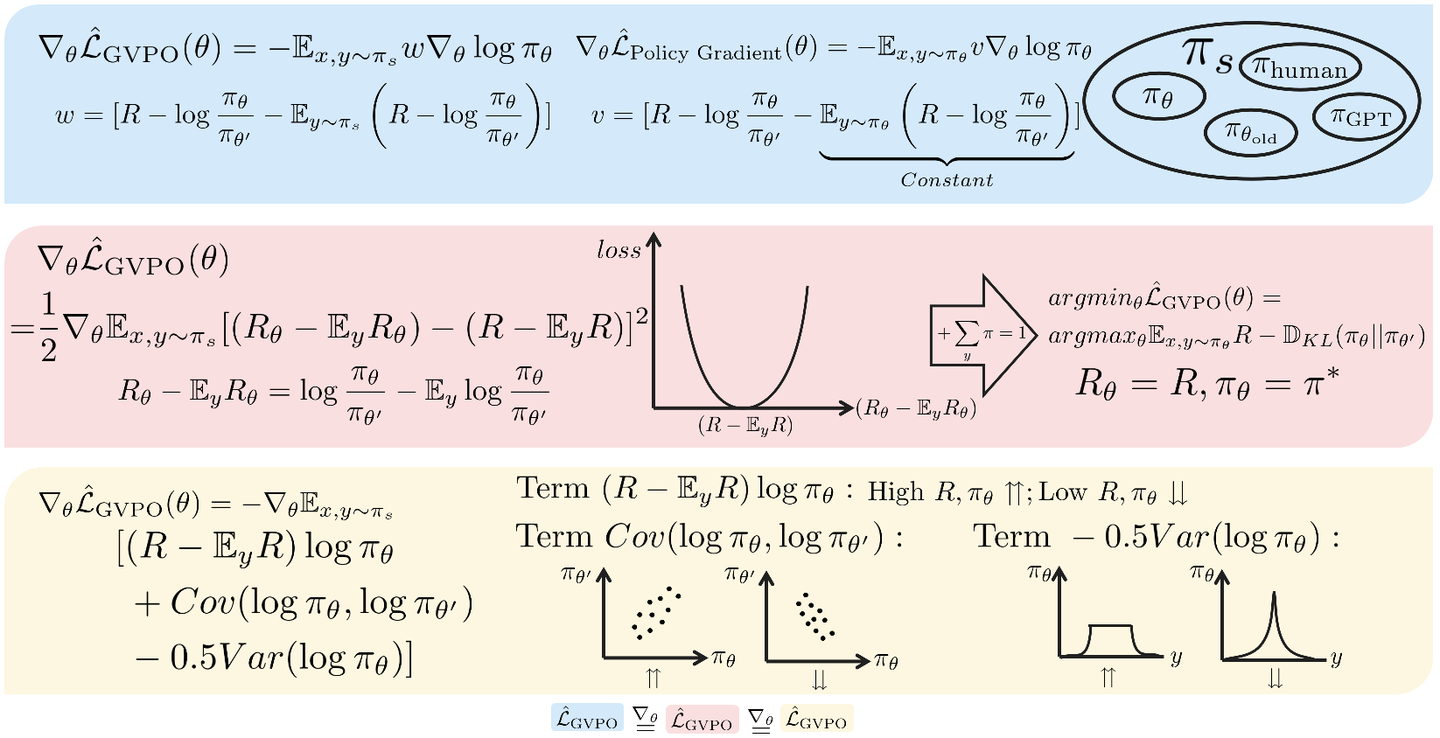
本文的封面概括了GVPO的核心内容:
- 蓝色部分。我们从梯度权重 w 出发设计了GVPO loss,通过与policy gradient对比,体现了GVPO具有采样丰富性的优势。
- 红色部分。GVPO可以表示成真实reward和隐式reward的MSE形式。从MSE形式可以进一步推导出GVPO理论唯一最优解的优良性质。
- 黄色部分。通过拆解GVPO loss,可以从正则项的角度说明GVPO的稳定性。
此外,GVPO的实现十分简单,文章中展示了在verl框架下如何只修改几行代码实现GVPO。
论文:GVPO: Group Variance Policy Optimization for Large Language Model Post-Training
链接:https://arxiv.org/abs/2504.19599
感谢熊辉教授,洪定乾老师和各位合作者对本工作的支持。
欢迎讨论:-)


















 1258
1258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









