 OQC与Cyxtera合作,在数据中心部署量子计算机
OQC与Cyxtera合作,在数据中心部署量子计算机




 OQC与云服务公司Cyxtera合作,将量子计算机安装在数据中心,允许用户在本地数据集上运行量子算法。OQC的全栈量子计算机LUCY是一个80量子比特的系统,可以通过AWSAmazonBraket访问。公司强调量子计算需要与现有云基础设施集成,并且在数据中心内部署可以减少延迟,保护数据安全。
OQC与云服务公司Cyxtera合作,将量子计算机安装在数据中心,允许用户在本地数据集上运行量子算法。OQC的全栈量子计算机LUCY是一个80量子比特的系统,可以通过AWSAmazonBraket访问。公司强调量子计算需要与现有云基础设施集成,并且在数据中心内部署可以减少延迟,保护数据安全。
牛津量子电路(OQC)正与云服务公司Cyxtera合作,在数据中心安装量子计算机,方便用户在其本地数据集上运行量子算法。
在葡萄牙里本举行的网络峰会上,牛津量子电路(OQC)首席执行官ILana Wisby谈到了公司在量子计算方面的进步,她认为数据中心是利用这种颠覆性技术力量的最佳场景。
Wisby说:“1982年,理查德·费曼首次提出,我们需要量子计算机来解决真正的难题。我们的自然环境本质上都是由量子构成。因此,大自然比我们拥有的计算机更擅长解决其中一些问题。我们最初是牛津大学的衍生公司,是一家纯粹的量子计算服务公司。现在,我们构建了完整的全栈量子计算机,而不是量子处理器,并使用大学的专有IP。我们开发控制软件和硬件,然后将其连接到云。因此,客户可以直接在我们的系统上运行算法。”

OQC CEO ILana Wisby(图片来源:OQC)
量子计算公司总是被问到的一个问题是:你有多少量子比特?Wisby认为量子比特的数量并不是唯一的关键指标。她说:“我们需要有很多量子比特,对于完全容差的量子比特计算,我们需要数百万个量子比特。但是,如果量子比特本身的质量变差,那么简单地构建更多的量子比特是没有意义的。许多人正在构建更大的系统,但这些系统的整体运行能力越来越差。他们没有提高性能,而是在保持系统稳定时遇到了更多问题。”
目前,OQC从超导电路中制造量子比特。传统的2D电路需要越来越复杂的工程,将芯片上的控制布线路由到量子比特。这降低了量子比特的质量,工程代价高昂,并增加了错误率。其创新的核心技术Coaxmon具有3D架构,可将关键组件带离芯片外,从而大大提高了简单性、灵活性以及至关重要的可扩展性。
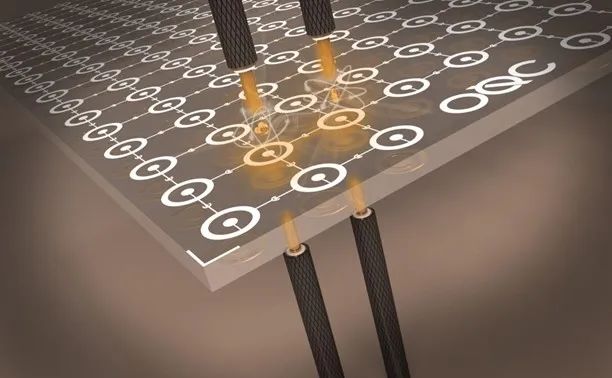
OQC的Coaxmon(图片来源:OQC)
OQC还构建了全栈量子计算机。LUCY是欧洲商用量子计算机,是一种80量子比特的量子计算机,可通过公共云和私有云访问。方法之一是登录AWS Amazon Braket,并在LUCY中运行量子算法。
Wisby认为:量子计算必须能与现有的云基础设施集成。她说:“我们正在进入下一阶段,即托管数据中心战略。我们正在数据中心部署我们的计算机,这些数据中心已经是客户的安全端点,他们的数据已经存在。为了使量子计算能够处理现有数据,低延迟连接是必须的。未来,大多数数据中心都将采用混合法,在同一场景结合数字和量子计算机。”

ILana Wisby在网络峰会现场(图片来源:网络)
OQC与Cyxtera的合作
Cyxtera是一家云服务公司,在30多个市场拥有60多个数据中心。两个月前,OQC与Cyxtera合作,在通用设施中安装了第一台量子计算机。两家公司认为,量子计算机与数据中心其余部分的托管和互连将通过减少延迟时间来提供更快的响应时间。在数据中心内启用量子算法还可以保护数据隐私和安全,因为原始数据不会离开所在场所。
Wisby说:“为了使量子计算真正达到可访问,并充分发挥其技术潜力,它必须无缝集成到企业当前的计算和数据管理基础设施中。现阶段,它还无法独立工作。通过这种开创性的合作,我们将让Cyxtera的客户直接访问我们最新的量子计算机,在他们的数据中心内,只需点击一个按钮,而无需对其操作进行任何更改。量子在减少能源使用方面存在巨大的机会,特别是在数据中心内。当然,数据中心在能量密度方面确实存在困难,我们需要很多额外的能量,从而确保我们能以可持续的方式创造更多的可能。”
编译:卉可
编辑:慕一

















 37
37


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








