



一 源码下载
二 配置环境
可再terminal中直接运行
pip install -r requirements.txt
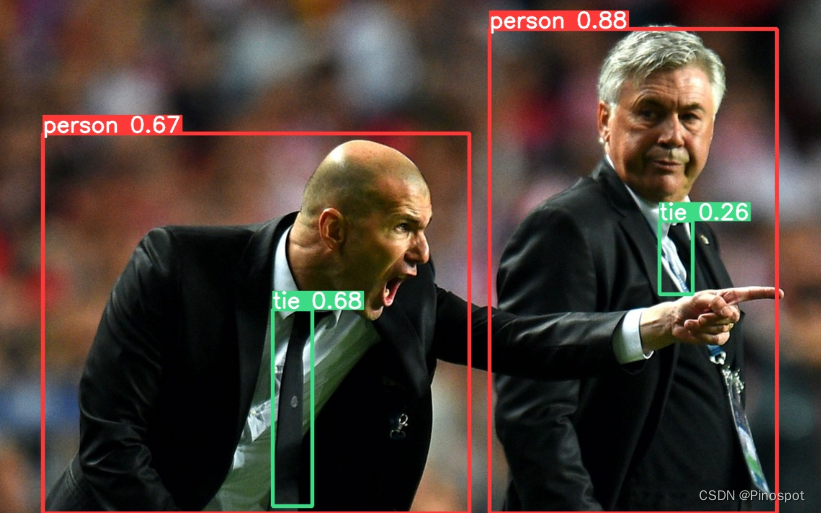
调用官方权重进行检测
detect.py,参数设置如下:

注:yolov5s.pt可在GitHub上直接下载,也可以直接运行detect.py文件,权重文件会自动下载(但是下载速度较慢)
结果会自动保存在run->detect->exp中

 本文介绍如何下载YOLOv5源码并配置运行环境。通过简单几步即可使用pip安装依赖,并利用预训练权重进行目标检测。即使下载速度较慢,也能自动完成权重文件的获取。
本文介绍如何下载YOLOv5源码并配置运行环境。通过简单几步即可使用pip安装依赖,并利用预训练权重进行目标检测。即使下载速度较慢,也能自动完成权重文件的获取。
可再terminal中直接运行
pip install -r requirements.txt
调用官方权重进行检测
detect.py,参数设置如下:
注:yolov5s.pt可在GitHub上直接下载,也可以直接运行detect.py文件,权重文件会自动下载(但是下载速度较慢)
结果会自动保存在run->detect->exp中
您可能感兴趣的与本文相关的镜像

Yolo-v5
YOLO(You Only Look Once)是一种流行的物体检测和图像分割模型,由华盛顿大学的Joseph Redmon 和Ali Farhadi 开发。 YOLO 于2015 年推出,因其高速和高精度而广受欢迎
 2872
1245
2872
1245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























