



3. 特点与优势
1) 丰富且高清晰行驶场景显示
(1) 场景显示:动画显示分辨率>4K、FPS>60、延时<0.1秒
在PanoDrive中,提供高分辨率、高帧率、低延时的场景显示是实现沉浸式驾驶体验的重要组成部分。PanoDrive使用高性能显卡来支持高分辨率的渲染,优化仿真模型和渲染管线,减少计算负担。
(2) 各类场景方便可选(城市场景、高速公路、乡村、停车场等行驶场景)
在PanoDrive中,提供了一系列方便选择的驾驶场景,以满足用户在不同环境下的测试和仿真需求。以下是一些常见的测试场景,如高速公路、环岛、乡镇、停车场等。用户可以选择预定义的场景,也可以创建自定义场景。

图11 虚拟驾驶场景
2) 高精度车辆动力学模型
(1) 模型精度高
通过设定一系列测试场景来验证动力学模型模型精度。这些场景覆盖各种驾驶条件,如直线加速、转向、制动、过弯、不同路面条件(湿滑、干燥、雪地等)等, 收集每个场景下的车辆状态数据,包括但不限于速度、加速度、位置、方向、轮胎力等。最终结果表示PanoDrive内嵌的车辆动力学模型与CarSim仿真结果高度一致。
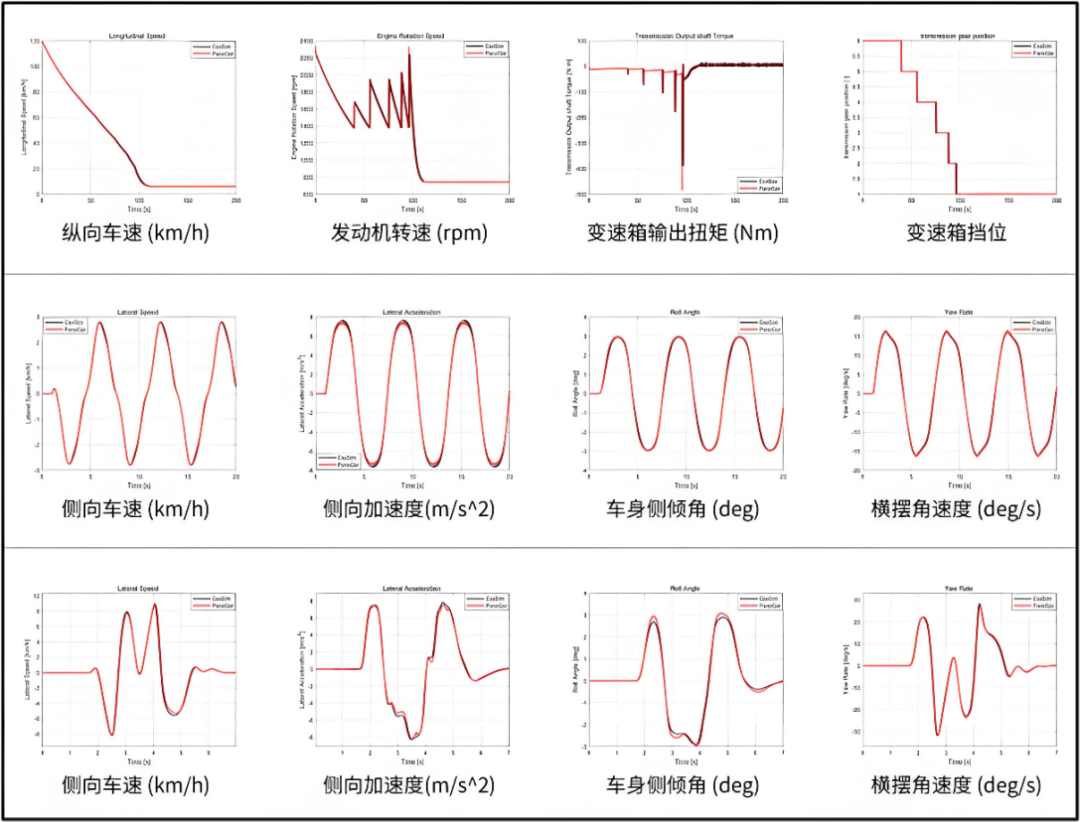
图12 仿真结果对比
(2) 多种不同车辆模型可选(不同品牌、不同类型,以及车辆参数化定制)
PanoDrive支持各种汽车制造商的车辆模型。同时可完成如传动系统、悬挂系统、轮胎系统等车辆动力学参数定制。

图13 车辆模型
3) 高逼真力感模拟
(1) 转向力感模拟精度 >95%(与实车数据对比)
通过收集真实车辆在各种驾驶条件下的转向力感数据与PanoDrive内嵌的车辆动力学模型做对比,通过图表可视化对比转向力随时间的变化曲线,据对比分析的结果,PanoDrive的转向力感模拟精度超过95%。
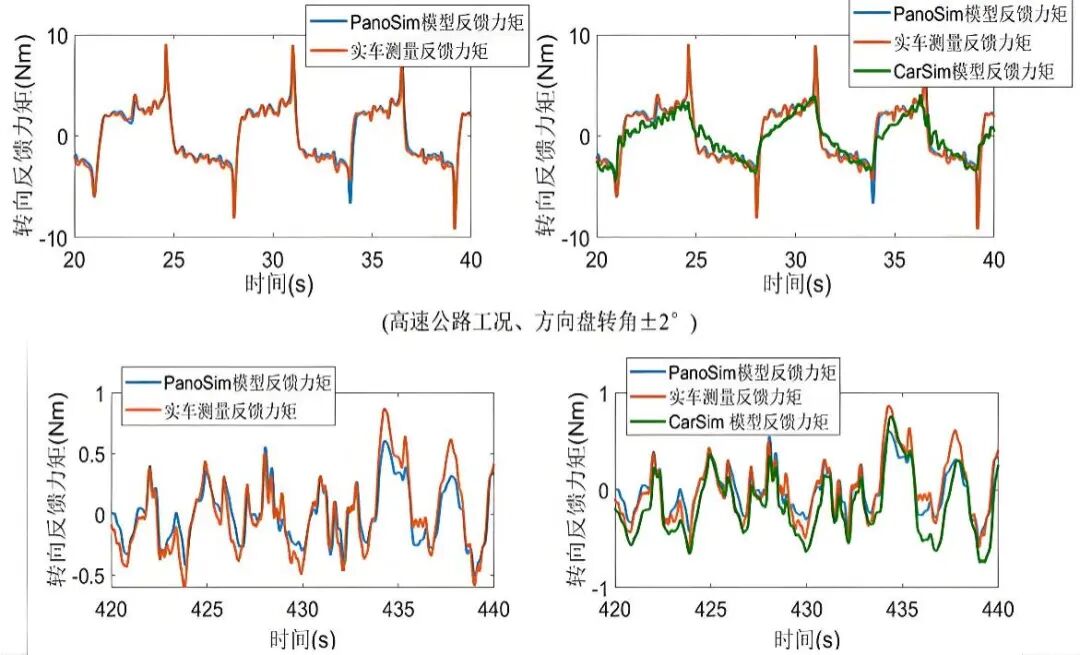
图14 转向力感精度对比
(2) 力感可调、可个性化定制
在PanoDrive中,提供的力感模拟功能不仅支持精确的仿真,还允许用户对力感进行调整和个性化定制。通过调整力矩的变化规律,可以模拟不同车辆或不同驾驶模式(如舒适、运动)下的转向响应。用户可以根据自己的驾驶习惯和偏好,定制转向力感,使之更符合个人驾驶风格。
4) 灵活可编程HMI
(1) 丰富的接口API支持多用途HMI定制
PanoDrive提供了一系列HMI编辑的API接口。通过API接口,允许用户定制驾驶环境,如灯光、雨刮、驾驶员视角、导航信息,通过HMI控制和显示。
(2) 支持ADAS等人机交互HMI模拟
PanoDrive通过API接口,用户可以集成和定制ADAS功能,如自动泊车、车道保持、自动紧急制动等开关按钮,并将车辆的实时数据(如速度、转向角、加速度等)以图表等方式显示在HMI上。同时支持接入驾驶员监控系统,如注意力监控、疲劳检测等,并在HMI上显示警示信息。
5) 支持“人在回路”与“人机共驾” 实时仿真
(1) 丰富的软硬件接口支持“人在回路”DIL实时仿真
基于公司自研的SoftRT(软实时)功能,PanoDrive的方向盘和踏板输入可以以1000HZ的频率接入仿真系统中,同时提供高性能计算机实时处理驾驶员输入并生成仿真结果,从而影响车辆的动态相应。
(2) 丰富的软硬件接口支持“人机共驾”实时仿真
在PanoDrive中,丰富的软件接口不仅仅支持用户接入开源自动驾驶栈,如Apollo、Autoware等,还支持实时设备的接入,允许用户集成自己的硬件设备,如域控制器(Domain Controller, DC)等。PanoDrive能够实现自动驾驶系统与驾驶员操作的协同工作,提高自动驾驶技术的开发效率和用户体验。
6) 与PanoSim无缝连接:
(1) 丰富的仿真工具链
-
FilderBuidler/WorldBuilder:仿真场地与场景编辑器,涵盖道路、交通设施、各类障碍物、天气光照及交通流等世界模型
-
SensorBuilder:传感器编辑器,支持各类传感器安装及仿真特性参数设置,支持面向应用的障碍物、车道线、停车位等环感信息仿真。
-
PlotBuilder:仿真数据绘图、可视化处理与动画显示。
(2) 丰富的场景数据库
-
丰富的标准测试、事故场景库
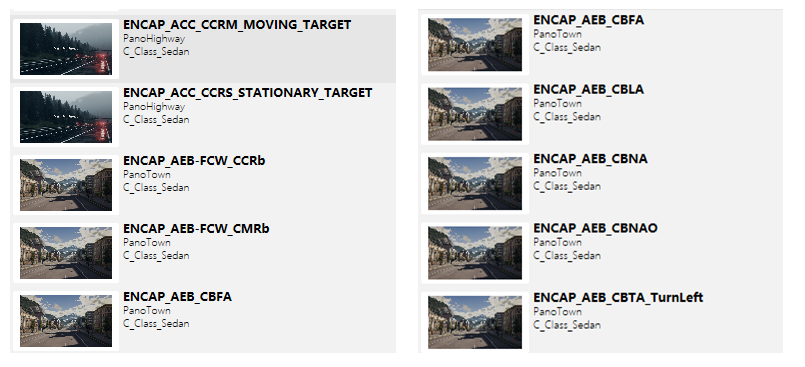
图15 测试数据库
-
丰富的AEB/ACC/LCC/AVP等自动驾驶或ADAS实例

图16 ADAS实例
7) 是PanoSim产品家族的重要组成部分:
(1) 支持SIL/MIL/HIL/VIL/DIL等XIL实时仿真
PanoDrive为用户提供了全方位的开发、测试和验证工具,能够在虚拟环境中模拟各种驾驶场景和条件,支持从算法到硬件设备的全面测试,提高自动驾驶技术的开发效率和可靠性。

图17 在环全链路仿真
(2) 人-车-路-云实时仿真、数字孪生仿真的重要组成部分
通过对物理世界的虚拟化,PanoDrive作为数字孪生的虚拟模型,模拟真实驾驶环境、车辆动态和驾驶员行为, 为驾驶员提供了一个安全、真实的虚拟驾驶环境,还为开发者提供了强大的测试和验证平台,支持智能交通系统的开发和优化。
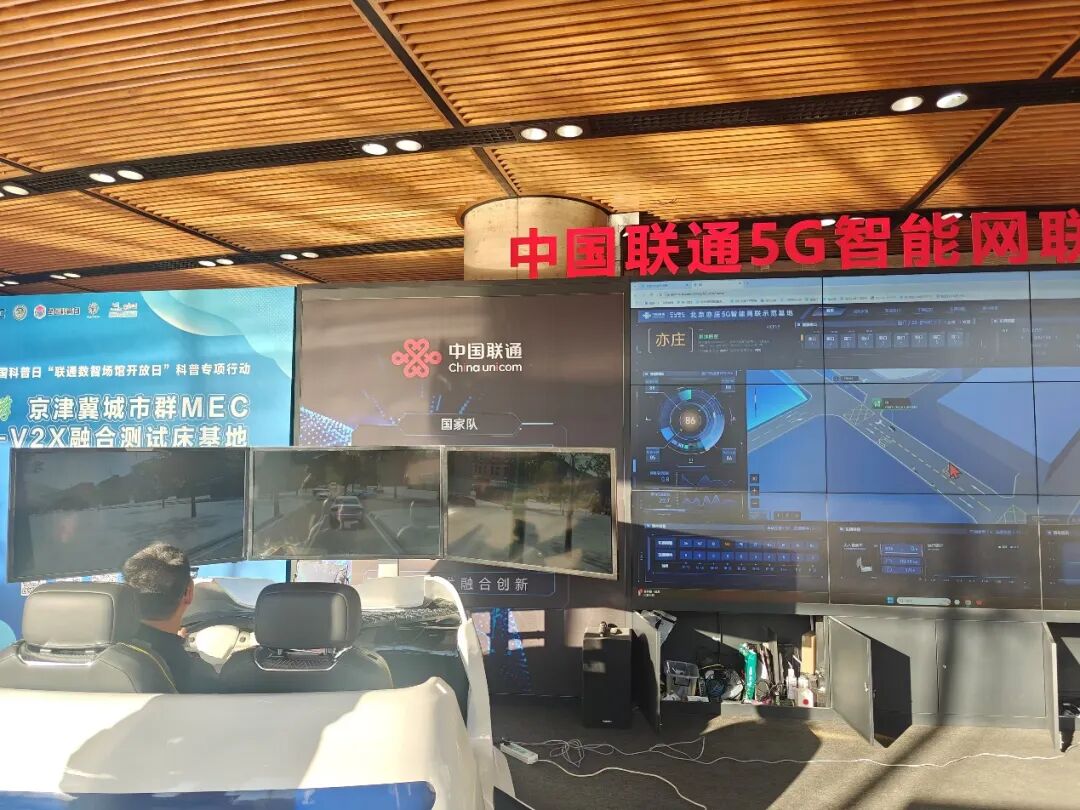
图18 人-车-路-云实时仿真


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









