




1.概况与组成
1) 概况
“智能网联汽车驾驶模拟器”-PanoDrive是基于PanoSim和PanoCar的内核,运用高精度车辆动力学实时解算和虚拟环境技术,针对智能驾驶算法开发、车辆性能分析与评估等应用场景而设计的一套软硬结合的智能驾驶仿真系统。PanoDrive基于PanoSim和PanoCar,通过对驾驶场景、传感器、交通流和实验案例的仿真,为车辆动力学计算和算法开发提供了精确支持;同时,PanoDrive集成了驾驶模拟座舱、实时仿真机、方向盘转向与踏板系统、视景显示系统等,为驾驶员提供逼真的操控感和沉浸式驾驶体验,为智能驾驶算法与车辆性能的多维度分析与验证提供了安全高效的软硬件平台;可支持软实时和硬实时模式,为智能驾驶技术与产品的开发、验证、测试与培训等提供了高效、精确、可扩展的仿真平台。
2) 组成
(1) 结构框图
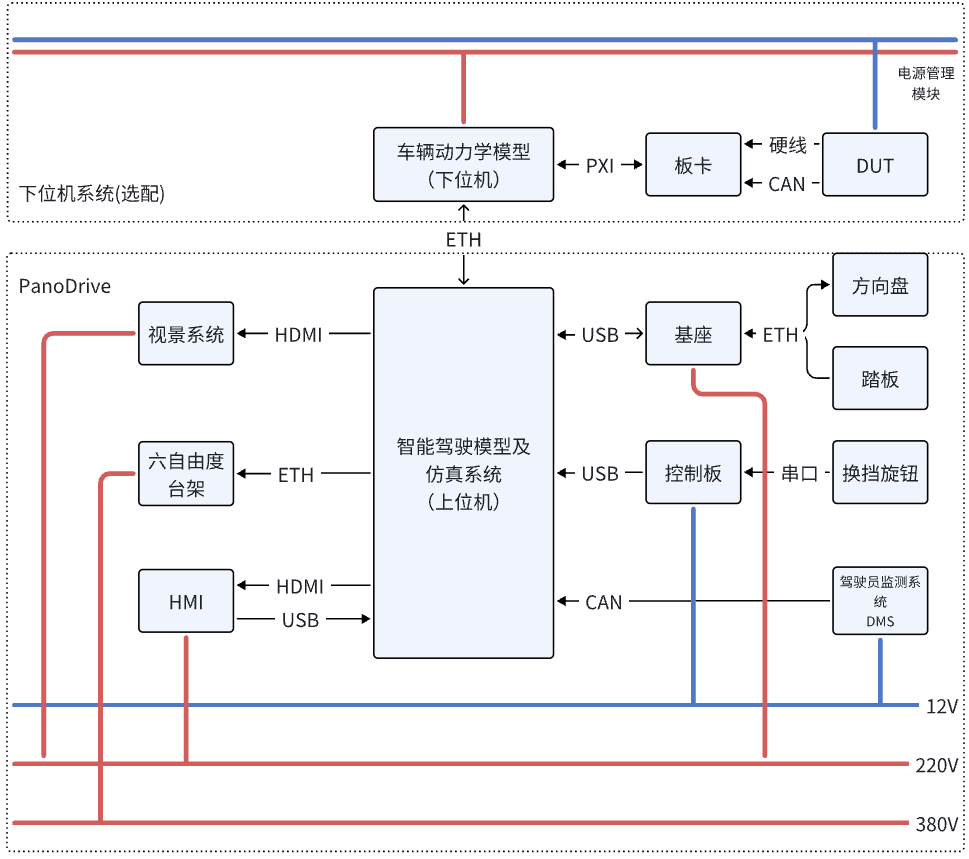
图1 PanoDrive结构框图
(2) 软件组成
-
智能驾驶模型及仿真系统
PanoDrive内置是汽车自动驾驶一体化仿真与测试平台,集高精度车辆动力学模型、高逼真汽车行驶环境与交通模型、车载环境传感器模型和丰富的测试场景于一体,支持与Matlab/Simulink联合无缝仿真,提供包括离线仿真、实时硬件在环仿真(MIL/SIL/HIL/VIL)和驾驶模拟器等在内的一体化解决方案。

图2 自动驾驶一体化仿真工具链
-
车辆动力学模型
PanoDrive内嵌高精度复杂车辆动力学模型,不仅模型精度高,而且数值计算效率高、可长时间稳定仿真,具有很强的数值稳定性与鲁棒性;模型代码易移植,运算效率、实时性强。

图3 车辆动力学模型
(3) 硬件组成
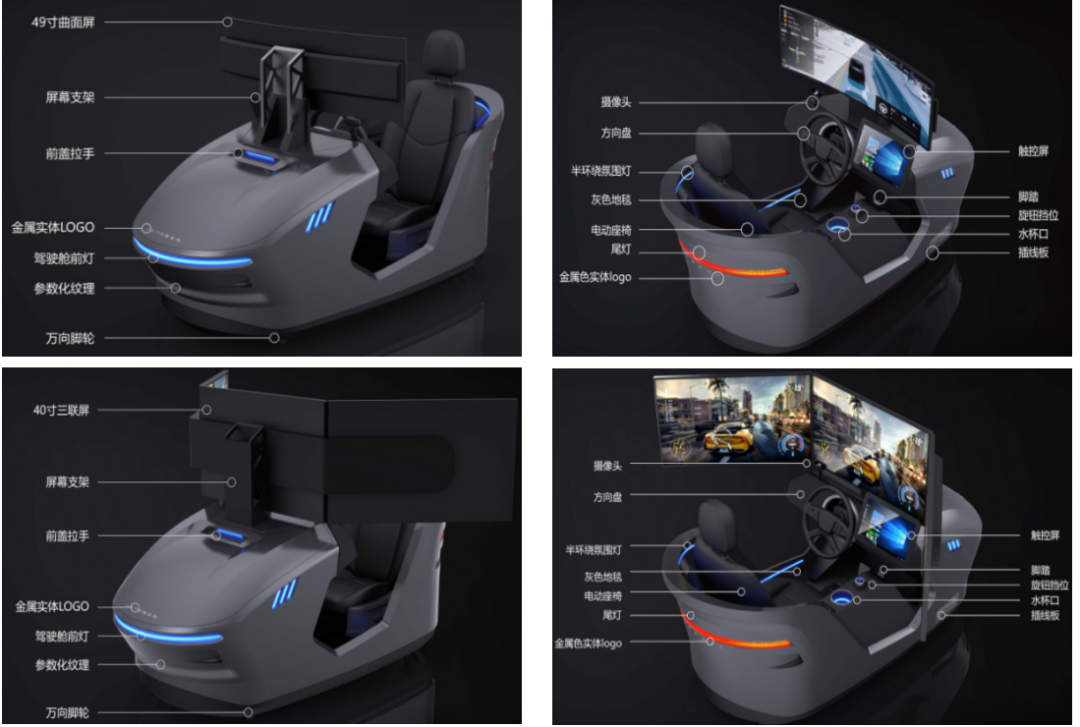
图4 PanoDrive硬件组成
-
驾驶模拟座舱
座舱外壳选用玻璃钢作为主要材料,功能全面,整体设计兼具工业风和科技风,同时支持定制座舱外观。
表1 座舱外壳

-
前视屏幕
支持采用三联屏或者曲面屏作为前视野屏幕,实时显示模拟软件的前视图。
表2 三联屏参数(单块屏幕)

表3 曲面屏参数表


图5 曲面屏与三联屏
-
HMI显示屏幕
HMI显示屏幕是可触摸式,用于展示仿真软件生成的交互信息以及车辆控制功能触发。

图6 HMI屏幕
表4 HMI显示器参数

-
力反馈转向系统
采用高性能直驱反馈电机及高精度动力学计算,支持实时调整转向力反馈,相应速度快,可以真正还原更真实的驾驶体验,同时支持用户自定义力感调节。在自动驾驶模式下,仿真软件可以控制方向盘进行自动转向,并实时获取转向系统信息。
表5 力反馈转向系统
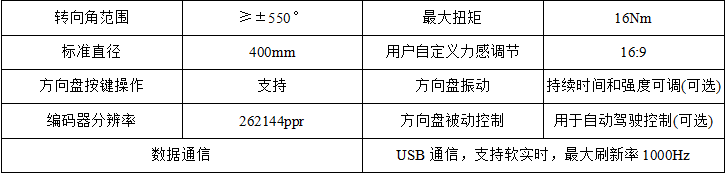

图7 力反馈转向系统
-
换挡系统
使用车辆真实换挡旋钮,功能与实车一致,具有N/D/R/P四个挡位,可与仿真软件通信。
表6 换挡系统


图8 换挡系统
-
力反馈踏板系统
力反馈踏板系统由加速踏板和制动器组成踏板,具有高品质的力反馈效果,踏板集成了压力传感器和角度传感器,可以实时获取踏板角度数据和压力数据,并将数据实时传输到驾驶仿真软件进行控制加速和减速。
表7 踏板系统
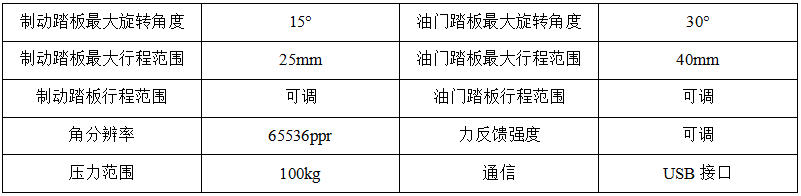

图9 力反馈踏板系统
-
高性能电脑(可选)
用于运行仿真软件及高精度动力学计算。
表8 高性能电脑


图10 高性能电脑
-
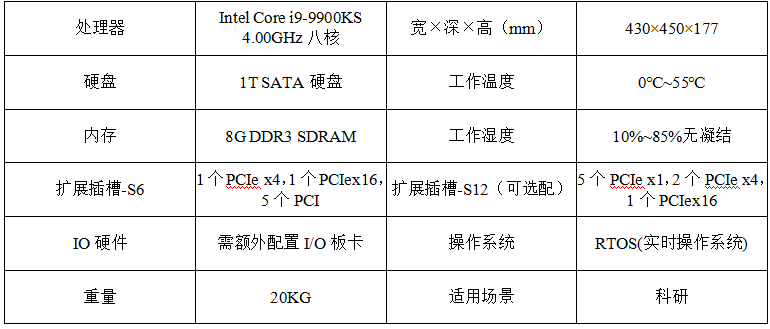
实时机(可选)
用于运行高精度动力学解算及用户硬件设备连接,确保用户硬件设备运行满足实时要求。
表9 实时机参数
-
环幕(可选)
可根据需求自由搭配大型环幕、巨幕投影等场景展示方式;依据真实驾驶位置匹配最佳视场角FOV,实现半包围的沉浸感。
-
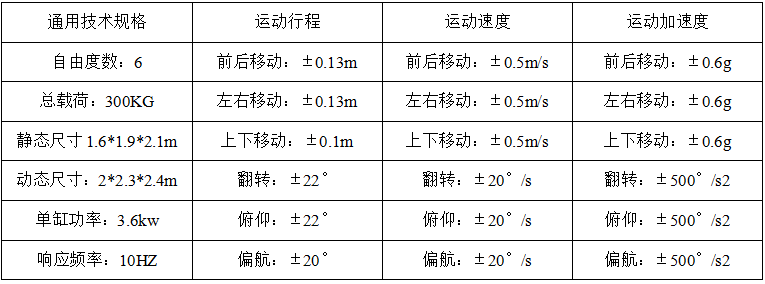
6轴台架(可选)
采用27自由度高精度车辆动力学模 型,结合6自由度体感子系统,实现精准的车辆姿态计算与反馈体验。
表10 六自由台架参数


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









