




为了模仿学习新的行为,人类操作员通过演示所需任务来远程操作机器人。这通常需要一两个小时的教学,通常相当于几十到百次左右的演示。
遥操作力反馈模仿学习结构,需要双臂耦合力感知
通过人类示范来教授机器人,所以良好的遥控界面对于教授具有挑战性的灵巧行为至关重要。对于更灵巧的行为,通过双手触觉设备进行教授,遥控设备和机器人之间有位置-位置耦合。位置-位置耦合意味着输入设备将测量的姿势作为命令发送给机器人,机器人使用基于扭矩的操作空间控制来跟踪这些姿势命令。然后,机器人的姿势跟踪误差被转换成力并发送回输入设备让老师感受。这使老师能够通过力来闭合与机器人的反馈回路,这对教授的许多最困难的技能都至关重要。
“扩散策略”优势
与以前的方法相比,使用扩散策略产生机器人行为有三个主要优点:
适用于多模式演示。这意味着人类演示者可以自然地教授行为,而不必担心让机器人感到困惑。
适用于高维动作空间。这意味着机器人可以提前规划,从而避免短视、不一致或不稳定的行为。
稳定可靠的训练。这意味着可以大规模训练机器人,并确信它们能够正常工作,而无需费力的手动调整或寻找黄金检查点。

遥操作力反馈需要PNP75传感器
遥操作“力反馈”的必要性
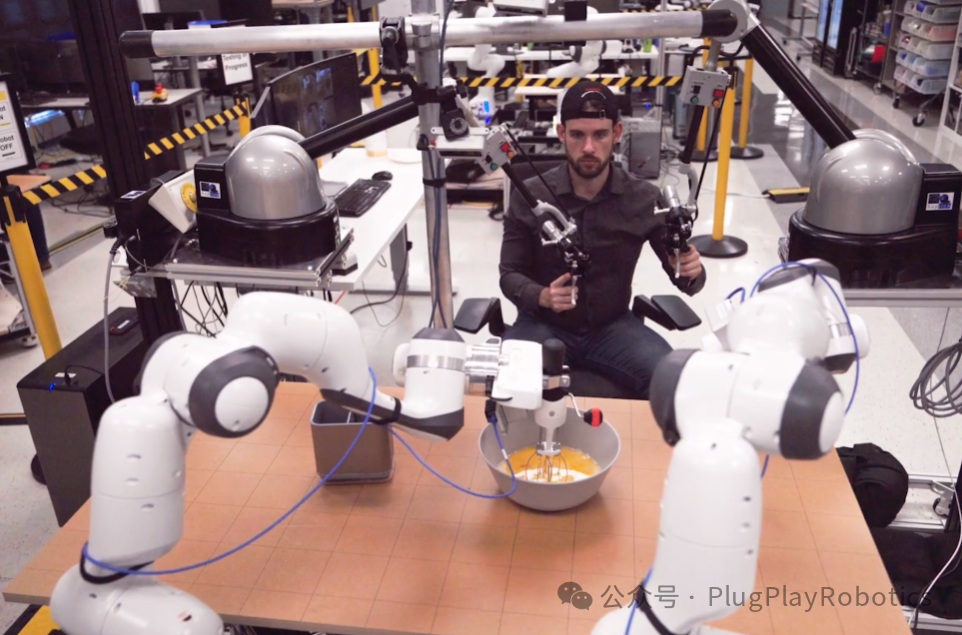
当机器人用双臂操纵物体时,提供力反馈尤为重要。一个典型示例是操作需要驱动的设备,例如手动搅拌器,如果没有这种反馈,就无法可靠地演示。
当机器人用双臂握住工具时,它会形成一个封闭的运动链。对于机器人和工具的任何给定配置,都存在大量可能的内部力,这些力无法通过视觉观察到。某些力配置(例如将夹持器拉开)本质上是不稳定的,并且很可能导致机器人的抓握滑落。如果人类演示者无法获
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1198
1198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









