 欧拉空间与矩阵表示二维空间
欧拉空间与矩阵表示二维空间





标准空间:欧拉空间是对现实空间的规则抽象和推广(从n<=3推广到有限n维空间)。
一个标准二维空间由互相垂直的两个标准单位向量e⃗1=(1,0)和 e⃗2=(0,1)\vec e_1=(1,0) 和 \ \vec e_2=(0,1)e1=(1,0)和 e2=(0,1)所定义,在e⃗1\vec e_1e1向量方向上的移动单位为e⃗1\vec e_1e1向量的模∥e⃗1∥\|\vec e_1\|∥e1∥,在e⃗2\vec e_2e2向量方向上的移动单位为e⃗2\vec e_2e2向量的模∥e⃗2∥\|\vec e_2\|∥e2∥。用矩阵表示这个二维空间:
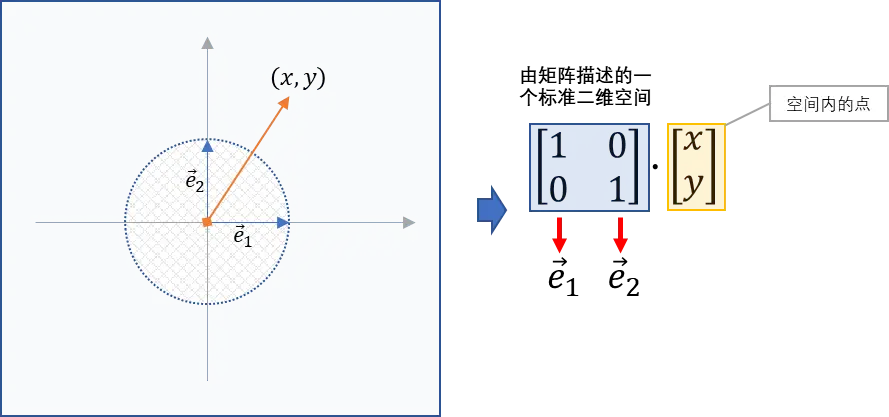
从列视角看待下式矩阵与向量的乘法:
[1001]⋅[xy]=[10]x+[01]y=[x0]+[0y]=[xy]=x⋅e⃗1+y⋅e⃗2\begin{bmatrix} 1&0 \\ 0&1 \end{bmatrix} \cdot \begin{bmatrix} x \\ y \end{bmatrix} = \begin{bmatrix} 1\\0\end{bmatrix}x + \begin{bmatrix} 0 \\1 \end{bmatrix}y = \begin{bmatrix} x \\0 \end{bmatrix} + \begin{bmatrix} 0\\y \end{bmatrix} = \begin{bmatrix} x \\y \end{bmatrix} = x \cdot \vec e_1 + y \cdot \vec e_2[1001]⋅[xy]=[10]x+[01]y=[x0]+[0y]=[xy]=x⋅e1+y⋅e2
在e⃗1=(1,0)和 e⃗2=(0,1)\vec e_1=(1,0)和 \ \vec e_2=(0,1)e1=(1,0)和 e2=(0,1)所定义的空间中,(x,y)(x,y)(x,y)这个坐标释意为描述一个在e⃗1\vec e_1e1向量方向上的移动单位为x⋅∥e⃗1∥x \cdot \|\vec e_1\|x⋅∥e1∥,和在e⃗2\vec e_2e2向量方向上移动yyy个$ |\vec e_2|单位后的点。构成空间的两个向量的模都是1,所以在两向量中分别移动单位后的点。构成空间的两个向量的模都是1,所以在两向量中分别移动单位后的点。构成空间的两个向量的模都是1,所以在两向量中分别移动x,y单位后的结果向量在该空间中为描述单位后的结果向量在该空间中为描述单位后的结果向量在该空间中为描述(x,y)$。
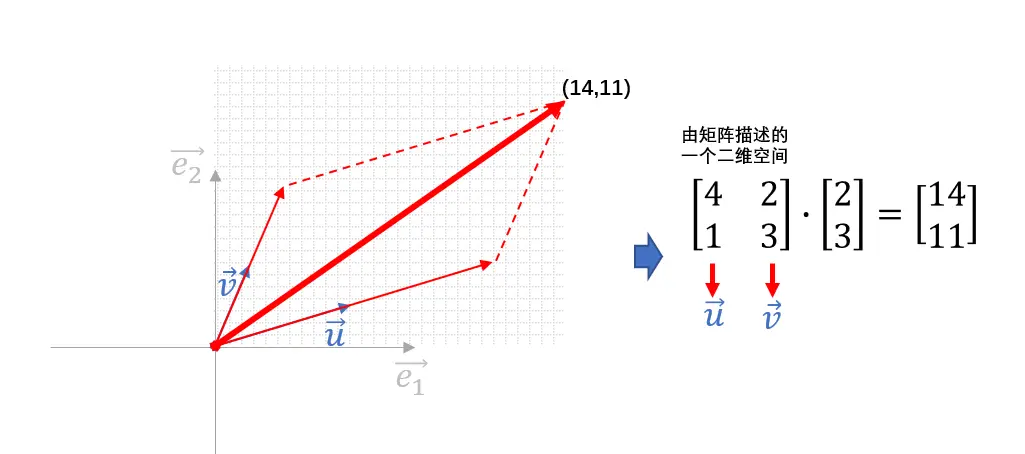
在欧拉空间中,任意nnn个线性无关向量组都可以建立一个空间,如两线性无关向量u⃗ , v⃗\vec u \ , \ \vec vu , v建立了一个空间:[4213]\begin{bmatrix} 4&2 \\ 1&3 \end{bmatrix}[4123],其中u⃗ , v⃗两向量的分量值是基于标准欧式空间给出的描述\color{red}{ \small 其中}\color{red}{\vec u \ , \ \vec v} \color{red}{\small 两向量的分量值是基于标准欧式空间给出的描述}其中u , v两向量的分量值是基于标准欧式空间给出的描述。我们可以知道,一个标准二维空间的点(2,3)(2,3)(2,3),坐标(2,3)(2,3)(2,3)是在这个标准二维空间中e⃗1\vec e_1e1方向上移动2个单位,e⃗2\vec e_2e2方向上移动3个单位的点对象的位置描述,这个点在u⃗ , v⃗\vec u \ , \ \vec vu , v建立的空间体系中的描述坐标应该是:
[4213]⋅[23]=2⋅[41]+3⋅[23]=[1411]=2⋅u⃗+2⋅v⃗\begin{bmatrix} 4&2 \\ 1&3 \end{bmatrix} \cdot \begin{bmatrix} 2 \\ 3\end{bmatrix} = 2 \cdot \begin{bmatrix} 4\\1\end{bmatrix} + 3 \cdot \begin{bmatrix} 2 \\ 3 \end{bmatrix} = \begin{bmatrix} 14 \\ 11 \end{bmatrix} = 2 \cdot \vec u + 2 \cdot \vec v[4123]⋅[23]=2⋅[41]+3⋅[23]=[1411]=2⋅u+2⋅v
在标准二维空间的基础上,建立一个非标准二维空间u⃗ , v⃗\vec u \ , \ \vec vu , v,并在非标准二维空间内刻画一个描述在标准二维空间内点(2,3)(2,3)(2,3)



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











