



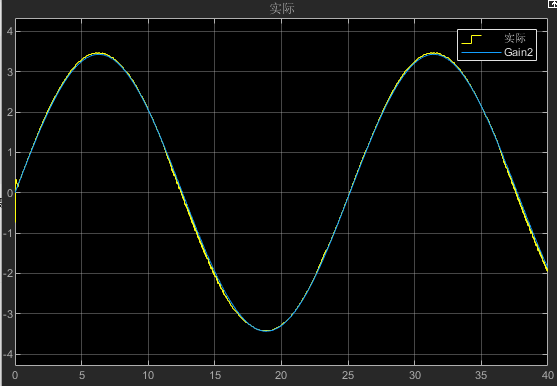
1.加速度跟踪曲线震荡严重
把我自己做的缓冲带去掉就好了,跟的非常完美哈哈哈。(补图)
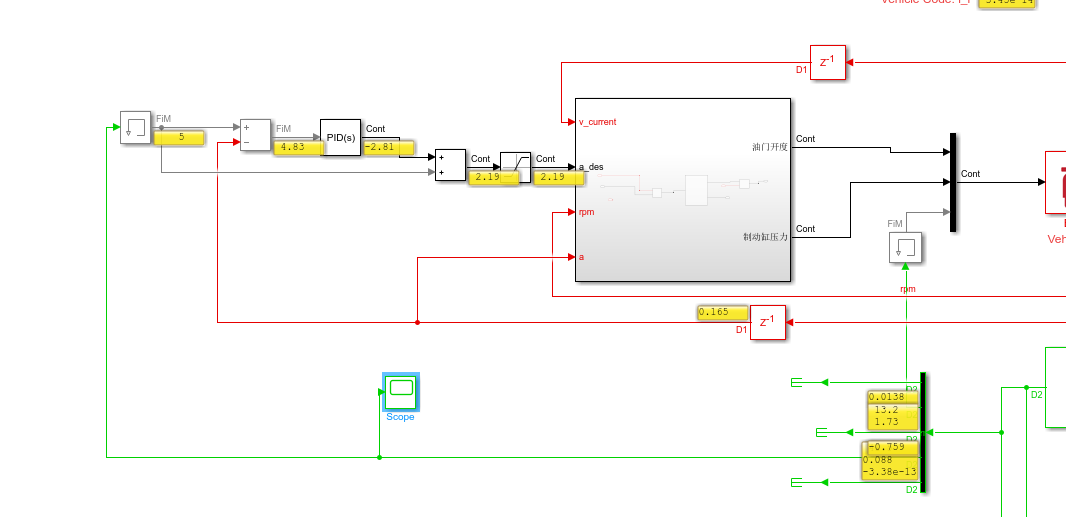
2.遗留问题:改变代码输出及carsim输入后,运行mpc代码显示“MPC solver not converged!”
因为担心是不是数据的问题,还重新跑去做了个标定表。(没解决)
解决:在接入输出信号的地方加一个“memory”。
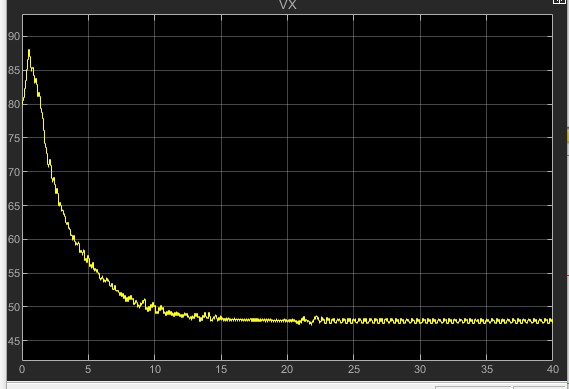
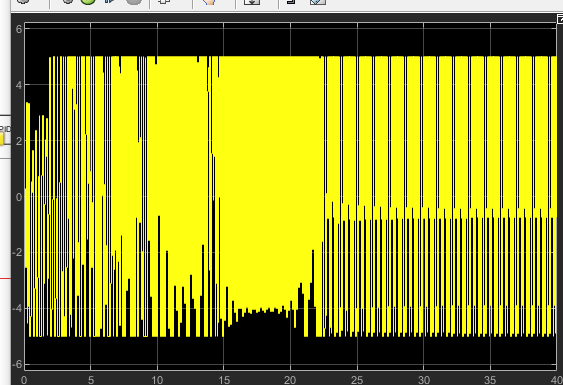
就是我有个地方不太理解,为什么都要在carsim处给个初速度(比如恒定速度啥的)才能进行跟踪,我在做加速度跟踪时有试过无速度控制,加速度就乱跑了,这次在修改代码时也试了下,结果也挺奇怪的
现在就是加速度乱飞,目前推测是mpc参数不合适的问题。不过看着CARSIM显示的动画,间距是控制住了,说明雷达模块和间距控制是起作用了的。

















 957
957

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









