



原理
我们以MG995等舵机为例,舵机有三个PIN,分别是VCC,GND,PWM,PWM引脚需要一个20ms周期信号,通过不同的占空比来控制不同角度,具体参数如下
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
在舵机的控制过程中,只需要控制占空比即可。然而,如果是大角度的切换,舵机将以最大转速到达目标位置,在简单的机械臂应用中,这样的控制往往会带来非常大的惯性。
为了避免这种惯性,对舵机进行类梯形加减速控制,如下图:
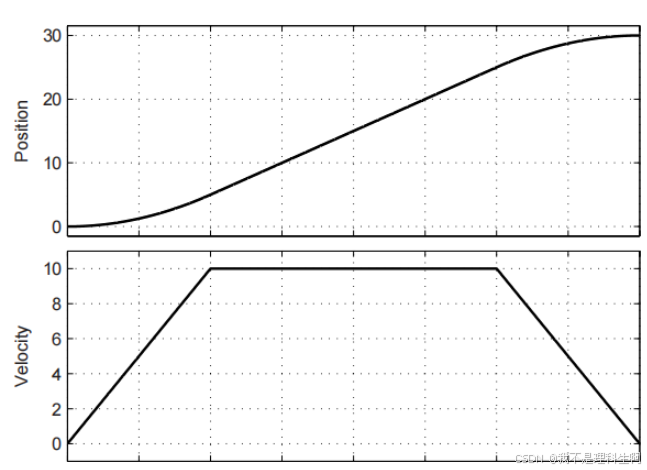
梯形加减速舵机控制
本质上是通过调节每20ms的占空比,使其逐步增加而不是直接变换,从而实现的梯形加减速控制。
每次占空比增加的数量是梯形加减速的核心。
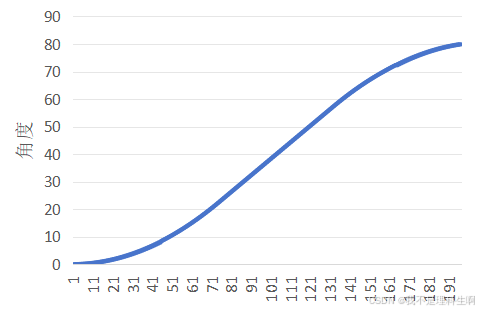
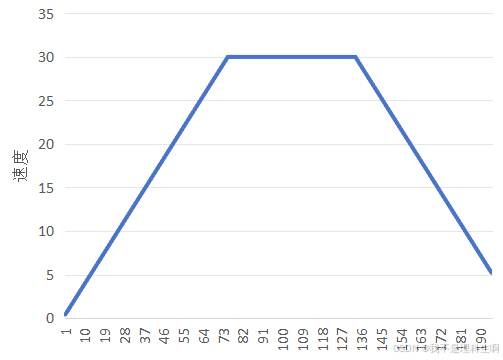
给出控制结果如下图:
代码
-
采用面向对象的方法编写C代码,首先使用一个结构体将舵机所需要的参数封装起来
typedef struct { float MaxAngle; //对应舵机转动的最大角度 float MinAngle; //对应舵机能转动的最小角度 float TargetAngle; //舵机的目标角度 float MaxOmega; //舵机的最大速度 float Omega; //舵机的速度 float Angle; //舵机的角度 float Acc; //舵机的加速度 uint8_t Dir; //舵机的方向 //#define CCW 0 #define CW 1 void (*SetPluse)(uint16_t us); //放在定时器更新中断中使用:定时器时钟配置为1Mhz,更新频率配置为50Hz }Servo_t; -
然后就是舵机的速度和角度更新函数,这个更新函数 需要放在20ms的定时器中定时调用,因为舵机控制的最小时间间隔是20ms。
uint8_t compulteNewPos(Servo_t*Node) { float AngleTo = Node->TargetAngle - Node->Angle; float AngleStop = Node->Omega * Node->Omega / 2 / Node->Acc; float Omega = Node->Omega; if (fabs(AngleTo) < 0.1 && AngleStop < 1) //在目标位置上 { Node->Angle = Node->TargetAngle; Node->Omega = 0; Node->Dir = CW; return 0; } if (AngleTo > 0) //目标在当前位置的顺时针方向 { if (AngleTo < AngleStop || Node->Dir == CCW) //应当减速 { if(Omega>0) Omega = Omega - Node->Acc * 0.02; else if(Omega <0) Omega = Omega + Node->Acc * 0.02; } else if(AngleStop< AngleTo && Node->Dir == CW)//应当加速 { Omega = Omega + Node->Acc * 0.02; Omega = min(Omega, Node->MaxOmega); } } else//目标在当前位置的逆时针方向 { if (-AngleTo < AngleStop || Node->Dir == CW) //应当减速 { if (Omega > 0) Omega =Omega - Node->Acc * 0.02; else if (Omega <0) Omega =Omega + Node->Acc * 0.02; } else if (AngleStop < -AngleTo&& Node->Dir == CCW)//应当加速 { Omega = Omega - Node->Acc * 0.02; Omega = max(Omega, -Node->MaxOmega); } } if (Omega == 0) { Node->Dir = AngleTo > 0?CW:CCW; } else { Node->Dir = Omega > 0 ? CW : CCW; } Node->Omega = Omega; Node->Angle = Node->Angle + Node->Omega * 0.02; return 1; } -
其次就是要对其他的一些参数设置进行封装。
/* * 将角度转换成脉冲宽度 */ uint16_t Angle2Pluse(Servo_t* Node) { return (Node->Angle - Node->MinAngle) / (Node->MaxAngle - Node->MinAngle) * 2000.0 + 500.0; } /* * 设置目标角度 */ void Servo_MoveTo(Servo_t* Node,float anlge) { Node->TargetAngle = anlge; } /* * 设置加速度 */ void Servo_SetAcc(Servo_t* Node, float acc) { Node->Acc = fabs(acc); } /* * 设置最大速度 */ void Servo_SetMaxOmega(Servo_t* Node, float max) { Node->MaxOmega = fabs(max); }

















 1216
1216

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









