



中国科学院空间应用工程与技术中心在空间科学实验领域的研究覆盖了多模态空间科学实验数据模式挖掘、领域知识抽取、跨学科知识融合与认知智能等研究内容,有效促进了空间科学实验领域的数据应用生态的体系化建设,相关研究成果已正式发表于权威学术期刊《中国科学院院刊》。 随着科学技术的不断发展,人工智能(AI)在各个科学领域都展现出了革命性的影响力,催生出了新的科学研究范式 AI4S(AI for Science),为科学研究开辟了新的道路。而在 AI4S 范式下的空间科学实验领域的研究,更将有力促进空间科学实验领域取得重大科学成果,推动AI与空间科学交叉学科的繁荣发展。
作为我国规模最大、功能最全的空间综合研究实验平台,中国空间站将支撑近千项具有前沿性与先进性的研究项目,并产出海量、高价值的科学数据,为人工智能(AI)驱动的跨学科智能认知研究奠定坚实基础。本文聚焦空间站空间科学实验领域,系统梳理了其多学科融合优势与大数据特征,深入剖析了当前面临的关键问题与挑战,进而提出未来发展的思考与建议。最终,旨在通过强化领域优势、构建开放协作生态等路径,持续推动该领域大数据挖掘与智能认知能力的深化发展。
空间科学实验领域研究已成为AI4S领域的重要前沿阵地
空间科学实验作为人工智能驱动的科学研究(AI for Science, AI4S)的关键领域,依托大规模实验数据展现显著优势,尤其在科技前沿蕴含巨大机遇。随着中国空间站建成“国家太空实验室”并长期在轨运行,其持续开展的多学科空间科学实验,将进一步强化这一优势。
-
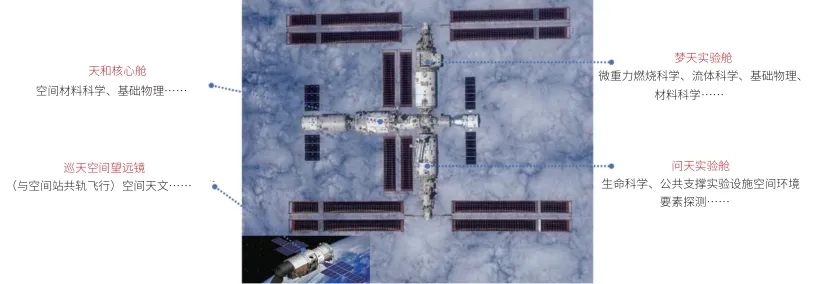
首先,该领域是AI4S范式的重要试验阵地。其研究范畴广泛覆盖空间生命科学与生物技术、微重力流体物理与燃烧科学、空间材料科学、微重力基础物理等多个学科,为AI4S研究提供了丰富而多样的应用场景。
-
其次,该领域的数据生态为AI4S研究提供了独特支撑。其数据通过统一的生态平台进行下载和分发,具备良好的统一性和规范性。相较于地面科学领域普遍存在的数据共享壁垒,空间科学更易于构建统一、面向AI应用就绪(AI-Ready)的数据中心,从而为探索新型AI范式奠定坚实基础。
-
最后,该领域固有的跨学科协同特性将有力驱动AI4S发展。作为一项系统性工程,空间科学实验需要载荷专家、技术专家与科学家紧密协作,这种跨学科团队优势天然有利于推动新型科研范式的探索。因此,AI驱动的空间科学实验研究在AI4S领域扮演着先锋角色,为科学研究与应用创新的突破性发展贡献着不可替代的力量。
数据驱动的空间科学实验研究需要空间科学实验和AI领域的交叉人才
空间科学实验领域的科学家与AI专家在专业背景和学科认知上存在显著差异,相互理解不足,构成双方深度协作的重要障碍。然而,AI4S作为典型的交叉学科,其突破性进展高度依赖于三者的紧密结合:领域科学家提出核心科学问题,AI专家提供技术支撑,并协同探索将领域知识有效融入智能模型,进而抽象提炼出适配AI能力的科学分析场景。唯有通过这种深度融合的协作模式,方能在空间科学领域催生认知智能的涌现。
构建AI4S的空间科学实验领域开放共享生态的必要性
当前AI领域的飞速发展,很大程度上得益于开放的大规模数据集与开源算法研发模式。然而,AI在科学智能(AI4S)领域面临瓶颈,其根源在于科学数据的专业性高、准入门槛高、通用性相对较低。为加速AI4S发展,构建开放共享的数据生态至关重要。这不仅将极大便利领域科学家与AI专家获取数据、吸引更广泛团队参与协作,更能有效驱动领域整体进步。同时,AI算法研发对海量数据与强大算力的需求,往往超出单一实验室的承载能力。因此,亟需打造融合云计算大算力基座、丰富场景数据资源与开源协同算法的空间科学实验研究生态与支持平台,从而推动科研模式从传统的“作坊式”向新一代AI4S范式根本性转变。
声明:本文转载自中国科学院院刊,仅供学习交流之用,如涉及作品内容、版权或其它问题,请联系 gaoziyu@heywhale.com,我们将在第一时间删除相关内容或采取必要措施

















 1563
1563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









