



无人艇路径跟踪:从零基础入门PID与MPC控制算法实现
一、引言
随着无人技术的快速发展,无人艇在海洋探测、物流运输、军事侦察等领域的应用越来越广泛。无人艇的路径跟踪技术是保证其准确、高效执行任务的关键。本文将围绕PID控制算法和模型预测控制(MPC)算法,详细介绍如何实现无人艇的路径跟踪。
二、PID+ILOS Simulink仿真
-
PID控制算法简介:PID(比例-积分-微分)控制器是一种广泛应用于工业控制的算法,它根据当前状态与目标状态的偏差,通过比例、积分和微分三个环节的调整,输出控制信号。
-
ILOS(视轴对准算法)应用:在无人艇路径跟踪中,ILOS可以用来提供方向指导。结合PID算法,可以通过调节偏差的反馈和修正方向信号来实现对航线的追踪。
三、MPC运动学路径跟踪代码
-
MPC算法原理:模型预测控制(MPC)是一种基于模型的优化控制算法,通过预测模型输出未来的状态,并选择最优的控制序列以最小化目标函数。
-
运动学路径跟踪代码实现:使用Casadi求解器,在Matlab中实现MPC算法的运动学路径跟踪代码。通过设定目标路径和当前状态,计算输出控制信号,实现对无人艇的路径跟踪。
四、MPC运动学+动力学路径跟踪代码
-
动力学模型引入:除了运动学模型外,引入无人艇的动力学模型可以更准确地预测和控制其运动状态。
-
代码实现:在Matlab中,使用Casadi求解器实现MPC运动学+动力学的路径跟踪代码。通过综合考虑运动学和动力学模型,计算更精确的控制信号,提高路径跟踪的精度和稳定性。
五、PID+LOS三种路径跟踪(折线、正弦曲线、圆弧)Python代码实现
-
路径设计:设计折线、正弦曲线和圆弧三种路径。
-
PID+LOS控制策略实现:在Python中编写代码,实现PID+LOS控制策略对这三种路径的跟踪。通过调整PID参数,实现对不同路径的精确跟踪。
六、反步法设计反馈控制器及稳定性证明
-
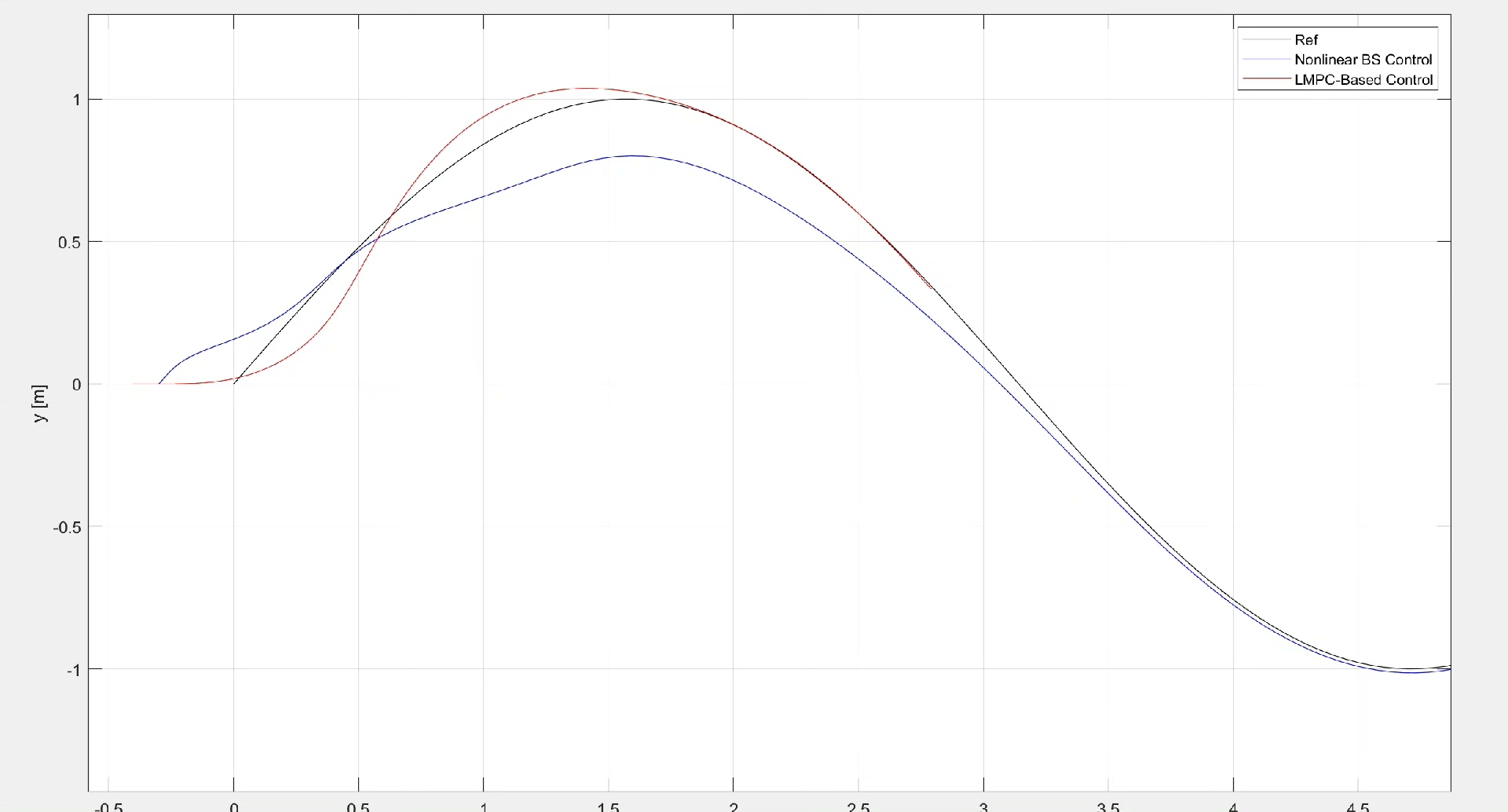
反步法设计:反步法是一种非线性控制的设计方法。通过设计反馈控制器,实现对无人艇的路径-轨迹跟踪。
-
稳定性证明:对设计的反馈控制器进行稳定性分析,证明其可以实现对无人艇的稳定路径跟踪。
七、结论
本文详细介绍了如何使用PID控制和MPC算法实现无人艇的路径跟踪。通过Simulink仿真、Matlab编程和Python编程,展示了从零基础入门这些控制算法的过程。同时,介绍了反步法设计反馈控制器的方法,并对其稳定性进行了证明。这些技术将为无人艇的路径跟踪提供有效的解决方案。
无人艇路径跟踪,非常适合零基础入门mpc和pid控制算法实现usv路径跟踪,自己编写的
内容如下:
1.PID+ILOS simulink仿真
2.mpc运动学路径跟踪代码,casadi求解,matlab实现
3.mpc运动学+动力学路径跟踪代码,casadi求解,matlab实现
PID+LOS三种路径跟踪,折线,正弦曲线,圆弧,python代码实现
5.backingstep control反步法设计反馈控制器,实现路径-轨迹跟踪(有稳定性证明)。



















 1058
1058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









