



项目上有台伺服电机,其电机驱动器支持CAN总线通讯。在前期实现时通过控制器与驱动器建立CAN通讯,然后在程序中通过CAN报文的收发实现电机的运动,这两天又重新仔细阅读了电机的手册,发现其支持CANOPEN,且配置了EDS文件。边阅读手册,边配置,记录下过程。
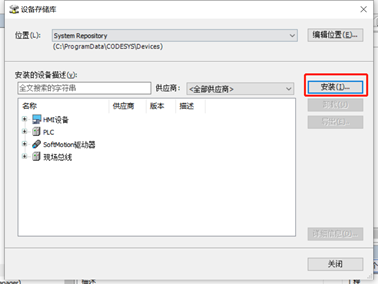
1、安装EDS文件
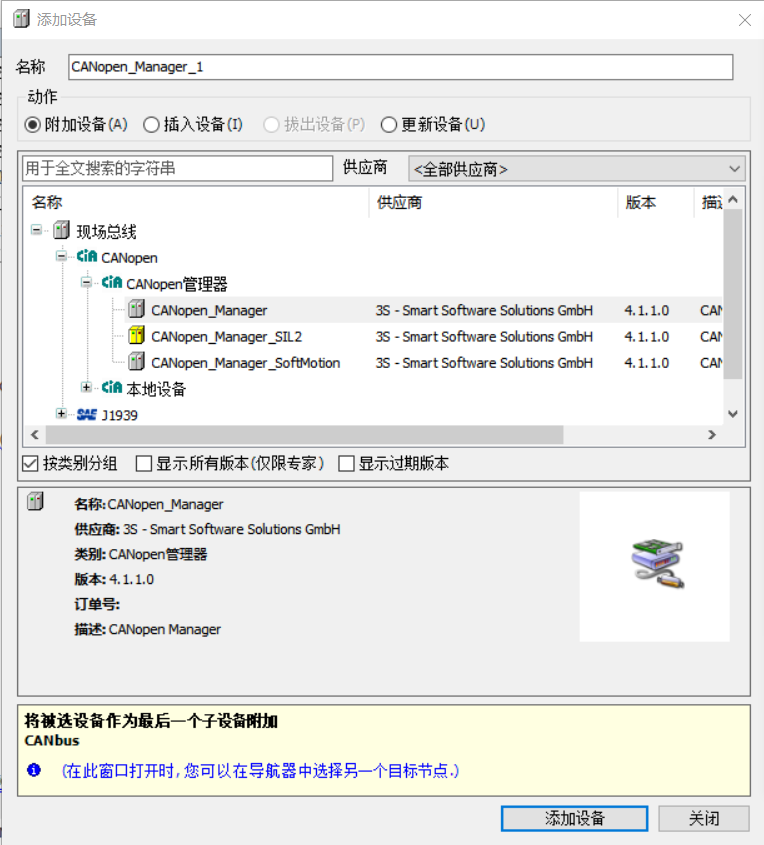
2、在项目工程中, 添加 CANbus 管理设备和使用的 CANopen 子设备。
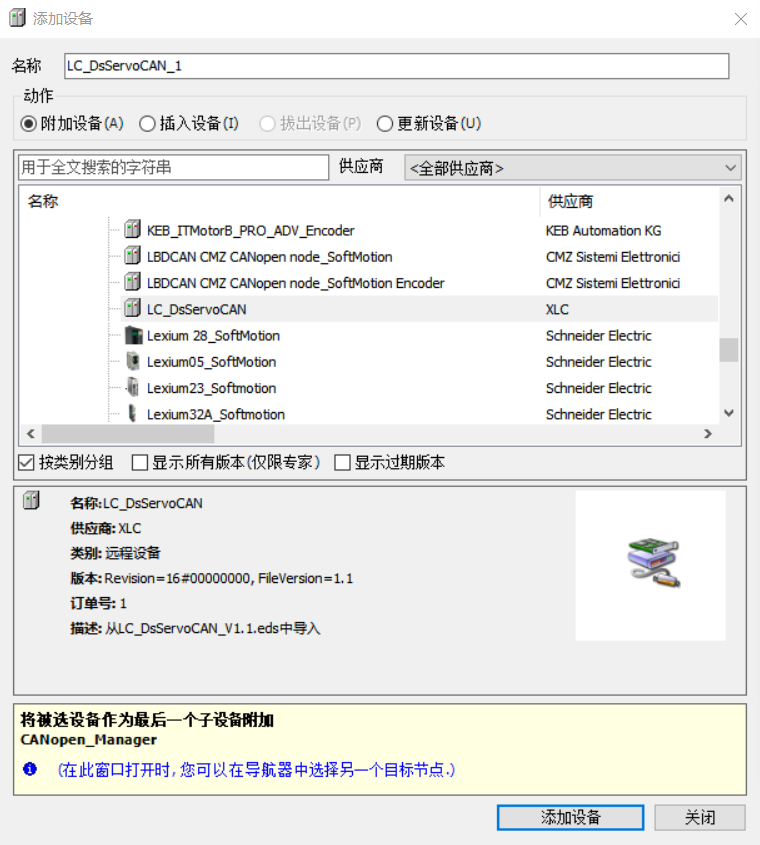
3、添加CANopen设备
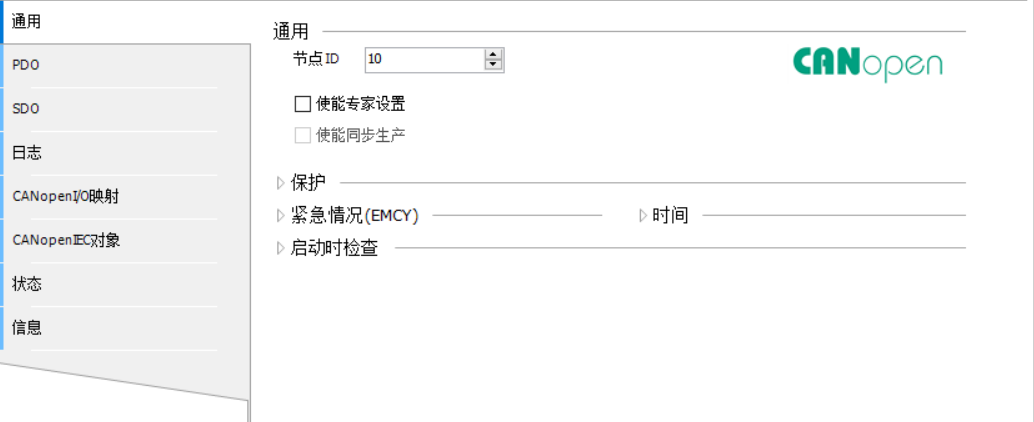
 4、配置CANOPEN设备ID
4、配置CANOPEN设备ID
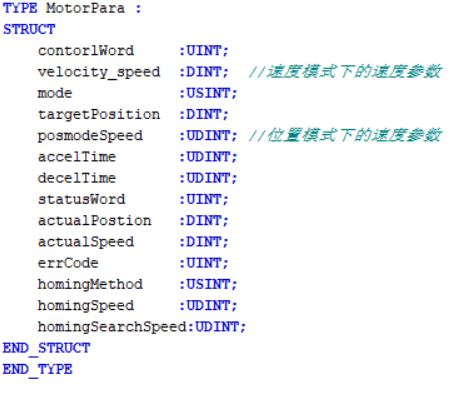
5、在程序中定义关于电机参数的结构体
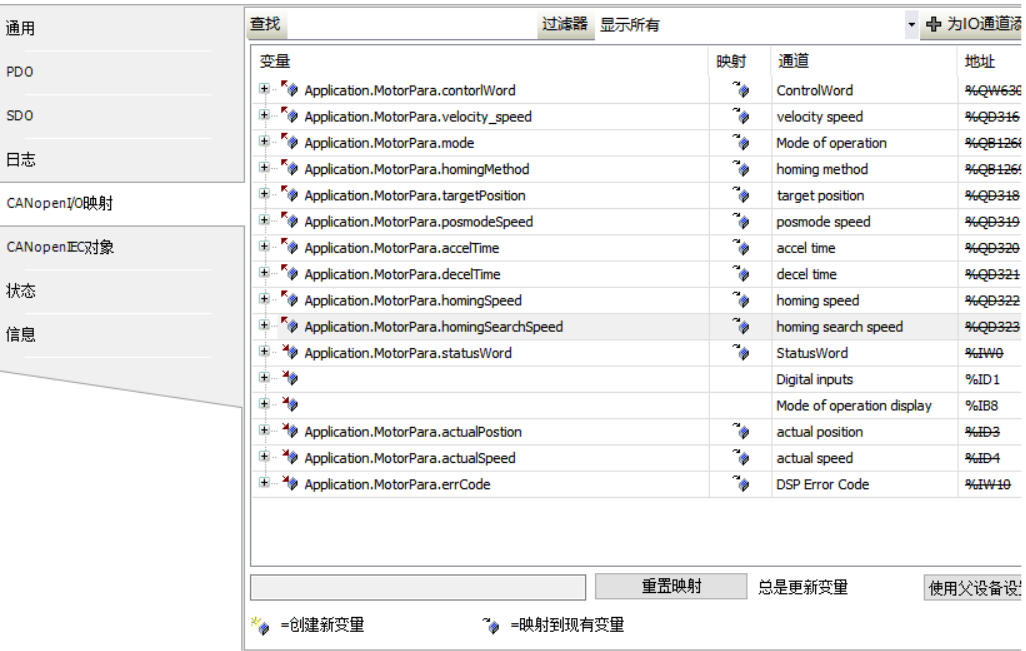
6、将定义的电机参数变量与通道映射。
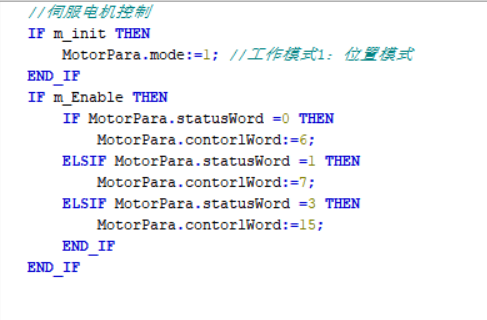
7、接下来在程序中对各参数进行逻辑处理,即可实现对电机的控制

















 5902
5902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









