




Chapt 4. 旋量代数在机器人学中的应用
4.1 串联机器人正运动学的指数积(PoE, Product of Exponetial)公式
4.1.1 回顾:机器人正运动学的Denavit-Hartenberg (D-H)参数公式
D-H 建模法: D-H 建模方法是由 Denavit 和 Hartenberg (ASME, 1955) 提出的一种建模方法,主要用在机器人运动学上。此方法在机器人的每个连杆上建立一个坐标系,通过齐次坐标变换实现两个连杆上的坐标变换,建立多连杆串联系统中首末坐标系的变换关系。
D-H 建模方法的几个要点如下:
a. 建立连杆坐标系;
b.确定四个参数α\alphaα, aaa, ddd, θ\thetaθ;
c. 列D-H参数表;
d.由参数表得到变换矩阵;
D-H 建模方法中,每个连杆使用 4 个参数 α\alphaα, aaa, ddd, θ\thetaθ 来描述,2 个描述连杆本身,另外 2 个描述与相邻连杆的位姿(连接或几何关系)。
对于转动关节,其中 θ\thetaθ 为关节变量,其他三个参数固定不变,为连杆参数;对于移动关节,ddd 为关节变量,其他三个为关节参数。
根据连杆坐标系和关节对应关系的不同,D-H 建模法可以分为传统 D-H (Classic DH) 和改进 D-H (Modified DH),二者的主要区别如下表所示。
| 区别 | Classic D-H | Modified D-H |
|---|---|---|
| 连杆固定坐标系的位置 | 后一个关节坐标系 | 前一个关节坐标系 |
| XXX 轴的确定方式 | 当前坐标系 ZZZ 轴和前一个坐标系 ZZZ 轴的向量积 | 后一个坐标系 ZZZ 轴与当前坐标系 ZZZ 轴的向量积 |
| 坐标系间的参数变换顺序 | θ\thetaθ, ddd, aaa, α\alphaα | α\alphaα, aaa, θ\thetaθ, ddd |
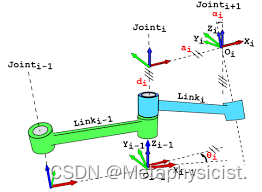
Classic D-H:
Classic DH 的关节和坐标系关系中各个参数的含义如下:
θi\theta_{i}θi: Xi−1X_{i-1}Xi−1 到 XiX_{i}Xi 绕Zi−1Z_{i-1}Zi−1旋转的角度;
did_{i}di: Xi−1X_{i-1}Xi−1 到 XiX_{i}Xi 沿 Zi−1Z_{i-1}Zi−1 方向的距离;
aia_{i}ai:Zi−1Z_{i-1}Zi−1 到 ZiZ_{i}Zi 沿 Xi−1X_{i-1}Xi−1 方向的距离;
αi\alpha_{i}αi: Zi−1Z_{i-1}Zi−1 到 ZiZ_{i}Zi 绕 Xi−1X_{i-1}Xi−1 旋转的角度
坐标系 Oi−1O_{i-1}Oi−1 与关节 iii 对齐,其 D-H 参数矩阵为:
ii−1T=[cosθi−sinθicosαisinθisinαiaicosθisinθicosθicosαi−cosθisinαiaisinθi0sinαicosαidi0001] _{i}^{i-1}T = \begin{bmatrix} \cos{\theta_{i}} & -\sin{\theta_{i}} \cos{\alpha_{i}} & \sin{\theta_{i}} \sin{\alpha_{i}} & a_{i} \cos{\theta_{i}} \\ \sin{\theta_{i}} & \cos{\theta_{i}} \cos{\alpha_{i}} & -\cos{\theta_{i}} \sin{\alpha_{i}} & a_{i} \sin{\theta_{i}} \\ 0 & \sin{\alpha_{i}} & \cos{\alpha_{i}} & d_{i} \\ 0 & 0 & 0 & 1 \end{bmatrix} ii−1T= cosθisinθi00−sinθicosαicosθicosαisinαi0sinθisinαi−cosθisinαicosαi0aicosθiaisinθidi1
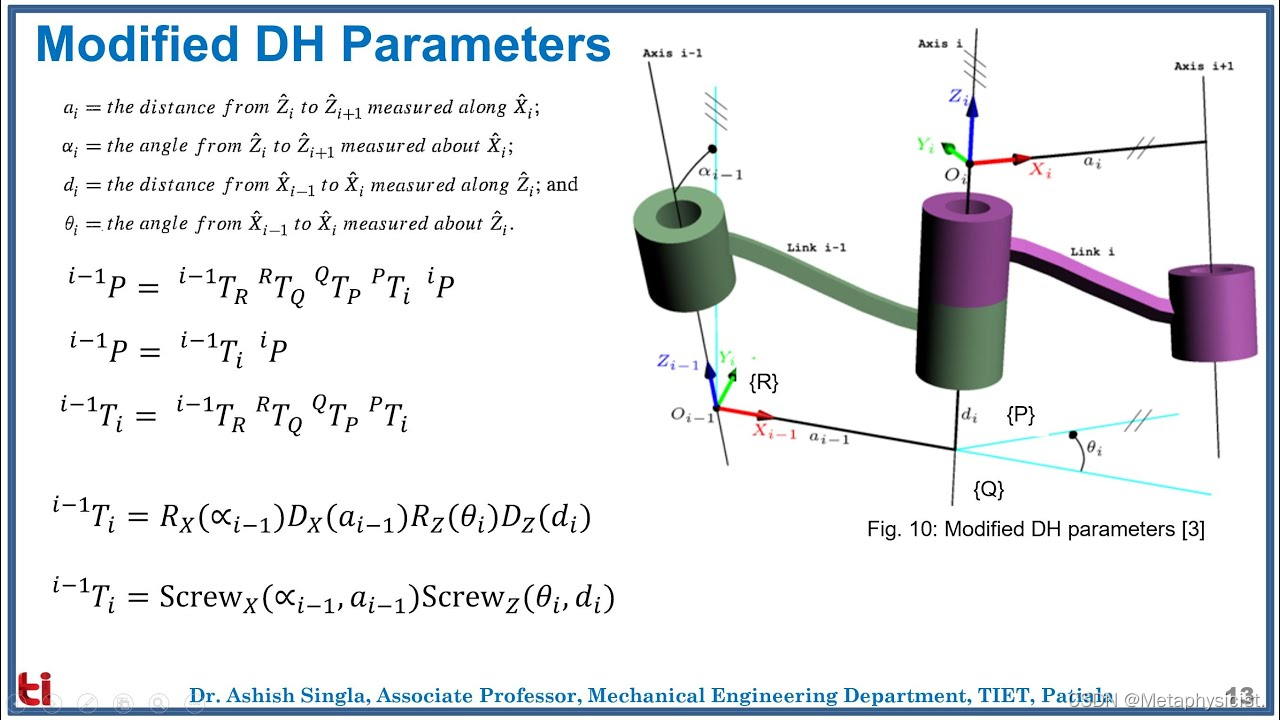
Modified DH:
Modified D-H 的关节和坐标系关系中各个参数的含义如下:
αi−1\alpha_{i-1}αi−1: Zi−1Z_{i-1}Zi−1 到 ZiZ_{i}Zi 绕 Xi−1X_{i-1}Xi−1 旋转的角度;
ai−1a_{i-1}ai−1:Zi−1Z_{i-1}Zi−1 到 ZiZ_{i}Zi 沿 Xi−1X_{i-1}Xi−1 方向的距离;
θi\theta_{i}θi:Xi−1X_{i-1}Xi−1 到 XiX_{i}Xi 绕 ZiZ_{i}Zi 旋转的角度;
did_{i}di: Xi−1X_{i-1}Xi−1到 XiX_{i}Xi沿 ZiZ_{i}Zi 方向的距离。
坐标系 Oi−1O_{i-1}Oi−1 与关节 i−1i-1i−1 对齐,其 D-H 参数矩阵为:
ii−1T=[cosθi−sinθi0ai−1sinθicosαi−1cosθicosαi−1−sinαi−1−disinαi−1sinθisinαi−1cosθisinαi−1cosαi−1dicosαi−10001] _{i}^{i-1}T = \begin{bmatrix} \cos{\theta_{i}} & -\sin{\theta_{i}} & 0 & a_{i-1} \\ \sin{\theta_{i}} \cos{\alpha_{i-1}} & \cos{\theta_{i}} \cos{\alpha_{i-1}} & -\sin{\alpha_{i-1}} & -d_{i} \sin{\alpha_{i-1}} \\ \sin{\theta_{i}} \sin{\alpha_{i-1}} &\cos{\theta_{i}} \sin{\alpha_{i-1}} & \cos{\alpha_{i-1}} & d_{i} \cos{\alpha_{i-1}} \\ 0 & 0 & 0 & 1 \end{bmatrix} ii−1T= cosθisinθicosαi−1sinθi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 4120
4120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











