clc
close all
clear all
%================================参数设置=============================================%
global boundary setstart setfinal node delta_H danger_xi danger_yi danger_zi danger_ri weight setstart_2 setfinal_2 ;
%node=12;%离终点最近的起始点到终点的节点个数(偶数)
delta_H=[20 40];%起飞(落地)高度、飞行过程最低高度
danger_xi=[207.1 393.9];%设置威胁区域坐标
danger_yi=[333.3 414.1];
danger_zi=[389.9 349.2];
danger_ri=[30 50];%设置威胁半径
weight=[1 0.05 0.6];%路径长度、离地面高度、夹角所占权重
boundary=[500 0];%设置环境上下限
%setfinal_ALL=[444 459 483];
setstart=[15.15 30.3 295.9];
setfinal=[449.5 459.6 422];
%==============确定节点数=================%
L_ALL=sqrt(((setfinal-setstart).^2)*ones(3,1));
L_FEN=17;%设置节点间的间隔距离
node=floor(L_ALL/L_FEN);
if mod(node,2)==1
node=node+1;
end;
%====================================================================================%
%======================================地形绘图=======================================%
SETenvironment;
surf(X,Y,Z);
box on;
rotate3d on;
xi=linspace(0,500,100);
yi=linspace(0,500,100);
[XI,YI]=meshgrid(xi,yi);
ZI=interp2(X,Y,Z,XI,YI,'cubic');
surf(XI,YI,ZI) %光滑曲面+等高线
hold on;
% for i=1:2
%
% h(i)=surf(X,Y,Z);
% alpha(h(i),0.2*i)
% Z=Z-100;
%
% end
%=====================================威胁区域绘图====================================%
[x,y,z]=sphere(200);
for k=1:size(danger_xi,2)
surf(danger_ri(k)*x+danger_xi(k),danger_ri(k)*y+danger_yi(k),danger_ri(k)*z+danger_zi(k));
hold on;
end
%====================================================================================%
maxCycle=20;%算法迭代次数
%/* Problem specific variables*/
D=3;
NP=40;
FoodNumber=NP/2;
limit=NP*D;
ub=ones(1,D)*(boundary(1)-10);
lb=ones(1,D)*(boundary(2)+10);
setfinal_2=setfinal+[0 0 delta_H(1)];
setstart_2=setstart+[0 0 delta_H(1)];
runtime=node+1;
objfun='UAV2';
GlobalMins=zeros(1,runtime);
GlobalParams_s=[setstart_2;zeros(node+1,3);setfinal_2];
for r=1:2*runtime
Range = repmat((ub-lb),[FoodNumber 1]);
Lower = repmat(lb, [FoodNumber 1]);
Foods = rand(FoodNumber,D) .* Range + Lower;
%====================================================================================%
if r<=node/2%Step1:将奇数位置的节点双向规划(基于X坐标均分)
X_ave=setstart_2(1):((setfinal_2(1)-setstart_2(1))/(node/2+1)):setfinal_2(1);
X_ave=X_ave(2:end-1);
if rem(r,2)~=0
Foods(:,1)=X_ave((r+1)/2);
ObjVal=feval(objfun,Foods,GlobalParams_s(r,:),GlobalParams_s(node+4-r,:));
else
Foods(:,1)=X_ave(node/2+1-r/2);
ObjVal=feval(objfun,Foods,GlobalParams_s(r+1,:),GlobalParams_s(node+5-r,:));
end
else
if r>node/2&&r<=runtime%Step2:将偶数位置的节点单向插缝规划(基于Step1所产生节点间的Y坐标中值)
feckParams_s=[0;0;GlobalParams_s(1:(end-2),2)];
feckParams_s=(GlobalParams_s(:,2)-feckParams_s)/2;
feckParams_s=[feckParams_s(3:end);0;0];
Y_ave=GlobalParams_s(:,2)+feckParams_s;
Foods(:,2)=Y_ave(2*(r-node/2)-1);
ObjVal=feval(objfun,Foods,GlobalParams_s(2*(r-node/2)-1,:),GlobalParams_s(2*(r-node/2)+1,:));
elseif r>runtime&&r<=runtime+node/2%Step3:重新将奇数位置的节点单向插缝规划(基于Step2所产生节点间的X坐标中值)
feckParams_s=[0;GlobalParams_s(4:end,1);0;0];
feckParams_s=(feckParams_s-GlobalParams_s(:,1))/2;
X_ave=GlobalParams_s(:,1)+feckParams_s;
Foods(:,1)=X_ave(2*(r-runtime));
ObjVal=feval(objfun,Foods,GlobalParams_s(2*(r-runtime),:),GlobalParams_s(2*(r-runtime)+2,:));
else%Step4:重新将偶数位置的节点单向插缝规划(基于Step3所产生节点间的Y坐标中值)
feckParams_s=[0;0;GlobalParams_s(1:(end-2),2)];
feckParams_s=(GlobalParams_s(:,2)-feckParams_s)/2;
feckParams_s=[feckParams_s(3:end);0;0];
Y_ave=GlobalParams_s(:,2)+feckParams_s;
Foods(:,2)=Y_ave(2*(r-node/2-runtime)-1);
ObjVal=feval(objfun,Foods,GlobalParams_s(2*(r-node/2-runtime)-1,:),GlobalParams_s(2*(r-node/2-runtime)+1,:));
end
end
%====================================================================================%
Fitness=calculateFitness(ObjVal);
%reset trial counters
trial=zeros(1,FoodNumber);
%/*The best food source is memorized*/
BestInd=find(ObjVal==min(ObjVal(find(ObjVal>0))));
BestInd=BestInd(end);
GlobalMin=ObjVal(BestInd);
GlobalParams=Foods(BestInd,:);
iter=1;
while (iter <= maxCycle),
%雇佣蜂先采一批蜜源回去供观察蜂观察
%%%%%%%%% EMPLOYED BEE PHASE %%%%%%%%%%%%%%%%%%%%%%%%
for i=1:(FoodNumber)
Param2Change=fix(rand*D)+1;
neighbour=fix(rand*FoodNumber)+1;
while(neighbour==i)%即如果随机生成的整数与i相等则再生成一个,直到不相等为止
neighbour=fix(rand*FoodNumber)+1;
end;
sol=Foods(i,:);
%与第个蜜源相对应的采蜜蜂依据如下公式寻找新的蜜源
sol(Param2Change)=Foods(i,Param2Change)+(Foods(i,Param2Change)-Foods(neighbour,Param2Change))*(rand-0.5)*2;%(rand-0.5)*2 即产生一个[-1:1]的随机数
ind=find(sol<(lb));%如果超出边界,则将值转变为边界值
sol(ind)=lb(ind);
ind=find(sol>(ub));
sol(ind)=ub(ind);
%evaluate new solution
if r<=node/2
if rem(r,2)~=0
ObjValSol=feval(objfun,sol,GlobalParams_s(r,:),GlobalParams_s(node+4-r,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(r+1,:),GlobalParams_s(node+5-r,:));
end
else
if r>node/2&&r<=runtime
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2)-1,:),GlobalParams_s(2*(r-node/2)+1,:));
elseif r>runtime&&r<=runtime+node/2
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-runtime),:),GlobalParams_s(2*(r-runtime)+2,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2-runtime)-1,:),GlobalParams_s(2*(r-node/2-runtime)+1,:));
end
end
FitnessSol=calculateFitness(ObjValSol);
% /*a greedy selection is applied between the current solution i and its mutant
if (FitnessSol>Fitness(i)) %/*If the mutant solution is better than the current solution i, replace the solution with the mutant and reset the trial counter of solution i*/
Foods(i,:)=sol;
Fitness(i)=FitnessSol;
ObjVal(i)=ObjValSol;
trial(i)=0;
else
trial(i)=trial(i)+1; %/*if the solution i can not be improved, increase its trial counter*/
end;
end;
%%%%%%%%%%%%%%%%%%%%%%%% CalculateProbabilities %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
prob=(0.9.*Fitness./max(Fitness))+0.1;%"."运算为矩阵运算
%prob=Fitness./sum(Fitness);
%%%%%%%%%%%%%%%%%%%%%%%% ONLOOKER BEE PHASE %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
i=1;
t=0;
while(t<FoodNumber)
if(rand<prob(i))
t=t+1;
Param2Change=fix(rand*D)+1;%随机生成[1:D]上的一个整数
neighbour=fix(rand*(FoodNumber))+1;
%/*Randomly selected solution must be different from the solution i*/
while(neighbour==i)
neighbour=fix(rand*(FoodNumber))+1;
end;
sol=Foods(i,:);
sol(Param2Change)=Foods(i,Param2Change)+(Foods(i,Param2Change)-Foods(neighbour,Param2Change))*(rand-0.5)*2;
% /*if generated parameter value is out of boundaries, it is shifted onto the boundaries*/
ind=find(sol<(lb));%如果超出边界,则将值转变为边界值
sol(ind)=lb(ind);
ind=find(sol>(ub));
sol(ind)=ub(ind);
%evaluate new solution
if r<=node/2
if rem(r,2)~=0
ObjValSol=feval(objfun,sol,GlobalParams_s(r,:),GlobalParams_s(node+4-r,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(r+1,:),GlobalParams_s(node+5-r,:));
end
else
if r>node/2&&r<=runtime
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2)-1,:),GlobalParams_s(2*(r-node/2)+1,:));
elseif r>runtime&&r<=runtime+node/2
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-runtime),:),GlobalParams_s(2*(r-runtime)+2,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2-runtime)-1,:),GlobalParams_s(2*(r-node/2-runtime)+1,:));
end
end
FitnessSol=calculateFitness(ObjValSol);
% /*a greedy selection is applied between the current solution i and its mutant*/
if (FitnessSol>Fitness(i)) %/*If the mutant solution is better than the current solution i, replace the solution with the mutant and reset the trial counter of solution i*/
Foods(i,:)=sol;
Fitness(i)=FitnessSol;
ObjVal(i)=ObjValSol;
trial(i)=0;
else
trial(i)=trial(i)+1; %/*if the solution i can not be improved, increase its trial counter*/
end;
end;
i=i+1;
if (i==(FoodNumber)+1)
i=1;
end;
end;
%/*The best food source is memorized*/
ind=find(ObjVal==min(ObjVal(find(ObjVal>0))));
ind=ind(end);
if (ObjVal(ind)<GlobalMin)
GlobalMin=ObjVal(ind);
GlobalParams=Foods(ind,:);%储存最小函数值对应参数
end;
%%%%%%%%%%%% SCOUT BEE PHASE %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%侦察蜂用于防止算法陷入局部最优
ind=find(trial==max(trial));
ind=ind(end);
if (trial(ind)>limit)
Bas(ind)=0;
sol=(ub-lb).*rand(1,D)+lb;%随机生成各参数值(即食物)
if r<=node/2
if rem(r,2)~=0
ObjValSol=feval(objfun,sol,GlobalParams_s(r,:),GlobalParams_s(node+4-r,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(r+1,:),GlobalParams_s(node+5-r,:));
end
else
if r>node/2&&r<=runtime
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2)-1,:),GlobalParams_s(2*(r-node/2)+1,:));
elseif r>runtime&&r<=runtime+node/2
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-runtime),:),GlobalParams_s(2*(r-runtime)+2,:));
else
ObjValSol=feval(objfun,sol,GlobalParams_s(2*(r-node/2-runtime)-1,:),GlobalParams_s(2*(r-node/2-runtime)+1,:));
end
end
FitnessSol=calculateFitness(ObjValSol);%计算适宜度
Foods(ind,:)=sol;%即超过‘limit’限制的食物被随机生成的食物代替
Fitness(ind)=FitnessSol;
ObjVal(ind)=ObjValSol;
end;
fprintf('代数=%d GlobalMin=%g\n',iter,GlobalMin);
iter=iter+1;
end ;% End of ABC
GlobalMins(r)=GlobalMin;
if r<=node/2
if rem(r,2)~=0
GlobalParams_s(r+2,:)=GlobalParams;
else
GlobalParams_s(node+3-r,:)=GlobalParams;
end
else
if r>node/2&&r<=runtime
GlobalParams_s(2*(r-node/2),:)=GlobalParams;
elseif r>runtime&&r<=runtime+node/2
GlobalParams_s(2*(r-runtime)+1,:)=GlobalParams;
else
GlobalParams_s(2*(r-node/2-runtime),:)=GlobalParams;
end
end
end; %end of runs
%=====================================路径绘图========================================%
scatter3([setstart(1) setfinal(1)],[setstart(2) setfinal(2)],[setstart(3) setfinal(3)],'*','r');
% line([setfinal(1) GlobalParams_s(node+2,1) ],[setfinal(2) GlobalParams_s(node+2,2)],[setfinal(3) GlobalParams_s(node+2,3)],'Color','k','LineWidth',1);
% line([setstart(1) GlobalParams_s(1,1) ],[setstart(2) GlobalParams_s(1,2)],[setstart(3) GlobalParams_s(1,3)],'Color','k','LineWidth',1);
% scatter3(GlobalParams_s(:,1),GlobalParams_s(:,2),GlobalParams_s(:,3),'*','r');
% line(GlobalParams_s(:,1),GlobalParams_s(:,2),GlobalParams_s(:,3),'Color','k','LineWidth',1);
%====================================================================================%
%hold on;
save all
CBI;%路径平滑绘图
%================================计算路径长度=========================================%
C=GlobalParams_s;
A=0;
for i=1:(size(C,1)-1)
A=A+sqrt(((C(i+1,:)-C(i,:)).^2)*ones(3,1));
end
A%输出规划航迹长度
min=sqrt(((setstart-setfinal).^2)*ones(3,1))%输出起始两点间的直线距离
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
- 159.
- 160.
- 161.
- 162.
- 163.
- 164.
- 165.
- 166.
- 167.
- 168.
- 169.
- 170.
- 171.
- 172.
- 173.
- 174.
- 175.
- 176.
- 177.
- 178.
- 179.
- 180.
- 181.
- 182.
- 183.
- 184.
- 185.
- 186.
- 187.
- 188.
- 189.
- 190.
- 191.
- 192.
- 193.
- 194.
- 195.
- 196.
- 197.
- 198.
- 199.
- 200.
- 201.
- 202.
- 203.
- 204.
- 205.
- 206.
- 207.
- 208.
- 209.
- 210.
- 211.
- 212.
- 213.
- 214.
- 215.
- 216.
- 217.
- 218.
- 219.
- 220.
- 221.
- 222.
- 223.
- 224.
- 225.
- 226.
- 227.
- 228.
- 229.
- 230.
- 231.
- 232.
- 233.
- 234.
- 235.
- 236.
- 237.
- 238.
- 239.
- 240.
- 241.
- 242.
- 243.
- 244.
- 245.
- 246.
- 247.
- 248.
- 249.
- 250.
- 251.
- 252.
- 253.
- 254.
- 255.
- 256.
- 257.
- 258.
- 259.
- 260.
- 261.
- 262.
- 263.
- 264.
- 265.
- 266.
- 267.
- 268.
- 269.
- 270.
- 271.
- 272.
- 273.
- 274.
- 275.
- 276.
- 277.
- 278.
- 279.
- 280.
- 281.
- 282.
- 283.
- 284.
- 285.
- 286.
- 287.
- 288.
- 289.
- 290.
- 291.
- 292.
- 293.
- 294.
- 295.
- 296.
- 297.
- 298.
- 299.
- 300.
- 301.
- 302.
- 303.
- 304.
- 305.
- 306.
- 307.
- 308.
- 309.
- 310.
- 311.




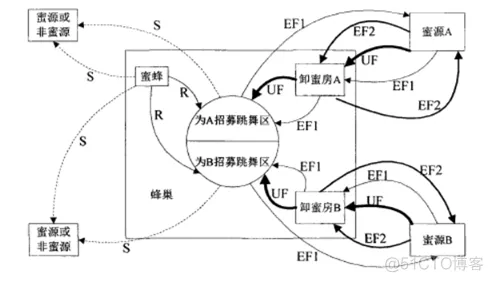
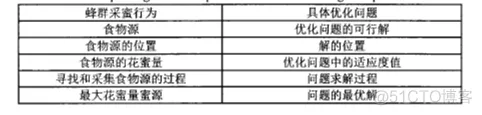
 人工蜂群算法中将人工蜂群分为引领蜂、跟随蜂和侦查蜂三类,每一次搜索过程中,引领蜂和跟随蜂是先后开采食物源,即寻找最优解,而侦查蜂是观察是否陷入局部最优,若陷入局部最优则随机地搜索其它可能的食物源。每个食物源代表问题一个可能解,食物源的花蜜量对应相应解的质量(适应度值fiti)。
人工蜂群算法中将人工蜂群分为引领蜂、跟随蜂和侦查蜂三类,每一次搜索过程中,引领蜂和跟随蜂是先后开采食物源,即寻找最优解,而侦查蜂是观察是否陷入局部最优,若陷入局部最优则随机地搜索其它可能的食物源。每个食物源代表问题一个可能解,食物源的花蜜量对应相应解的质量(适应度值fiti)。

















 1077
1077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









