 Matlab实现GA进行机器人路径规划
Matlab实现GA进行机器人路径规划




💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言
在智能制造、物流仓储、服务机器人等领域,机器人的广泛应用对路径规划提出了更高要求。机器人路径规划旨在为机器人在复杂环境中寻找一条从起始点到目标点的安全、高效路径。传统路径规划方法在处理复杂动态环境、多约束条件时存在局限性,而遗传算法(Genetic Algorithm,GA)作为一种模拟自然进化过程的智能优化算法,通过选择、交叉、变异等操作,在解空间中进行全局搜索,为机器人路径规划提供了新的解决方案,能够有效应对复杂场景下的路径规划难题。
二、遗传算法基本原理
生物进化启发
遗传算法借鉴生物进化中的自然选择、遗传和变异机制。在自然界中,生物种群通过遗传将优良性状传递给后代,同时因变异产生新的性状,适应环境的个体得以生存繁衍,不适应的则被淘汰。遗传算法将优化问题的解模拟为生物个体,通过对个体组成的种群进行操作,逐步进化出更优解 。
核心操作
- 选择:模拟自然选择中的 “适者生存”,根据个体的适应度(在路径规划中通常与路径质量相关),从当前种群中挑选个体进入下一代。适应度高的个体被选中的概率更大,常用的选择方法有轮盘赌选择、锦标赛选择等 。
- 交叉:模仿生物遗传中的基因重组,将两个父代个体的部分基因进行交换,生成新的子代个体。交叉操作能结合父代个体的优良特性,产生更具潜力的新解,常见的交叉方式有单点交叉、多点交叉和均匀交叉 。
- 变异:模拟生物的基因突变,以一定概率对个体的基因进行随机改变,为种群引入新的遗传物质,避免算法过早收敛,使算法能够探索更广阔的解空间 。
三、基于 GA 的机器人路径规划实现流程
编码方式
- 二进制编码:将机器人路径离散化为一系列的节点,每个节点的状态(如是否经过该节点)用二进制位表示,形成二进制编码串。这种编码方式简单直观,但解码时可能需要额外处理,以转化为实际的路径 。
- 实数编码:直接用实数表示路径节点的坐标,在处理连续空间问题时具有计算效率高、无需复杂解码的优势,适用于机器人在连续空间中的路径规划 。
- 路径点序列编码:将路径表示为一系列路径点的序列,每个路径点对应机器人在空间中的一个位置,这种编码方式更符合人类对路径的直观理解,便于后续的路径处理和分析 。
适应度函数设计
适应度函数用于评估个体(路径)的优劣,是引导遗传算法进化的关键。在机器人路径规划中,适应度函数通常综合考虑多个因素:
- 路径长度:较短的路径能减少机器人的运行时间和能耗,通常将路径长度的倒数作为适应度函数的一部分,路径越短,适应度越高 。
- 避障情况:对路径中与障碍物的接近程度进行惩罚,例如设置距离障碍物越近,适应度越低 。
- 平滑度:为使机器人运动更平稳,避免频繁转向,对路径的平滑度进行评估,路径越平滑,适应度越高 。
算法执行过程
- 初始化种群:随机生成一定数量的个体(路径),构成初始种群。种群规模影响算法的搜索能力和计算效率,需根据问题规模合理设置 。
- 计算适应度:依据适应度函数,计算每个个体的适应度值,评估其优劣 。
- 选择操作:采用轮盘赌选择、锦标赛选择等方法,从当前种群中选择个体进入下一代 。
- 交叉操作:按照设定的交叉概率,对选中的个体进行交叉,生成新的子代个体 。
- 变异操作:以一定的变异概率对个体进行变异,引入新的遗传信息 。
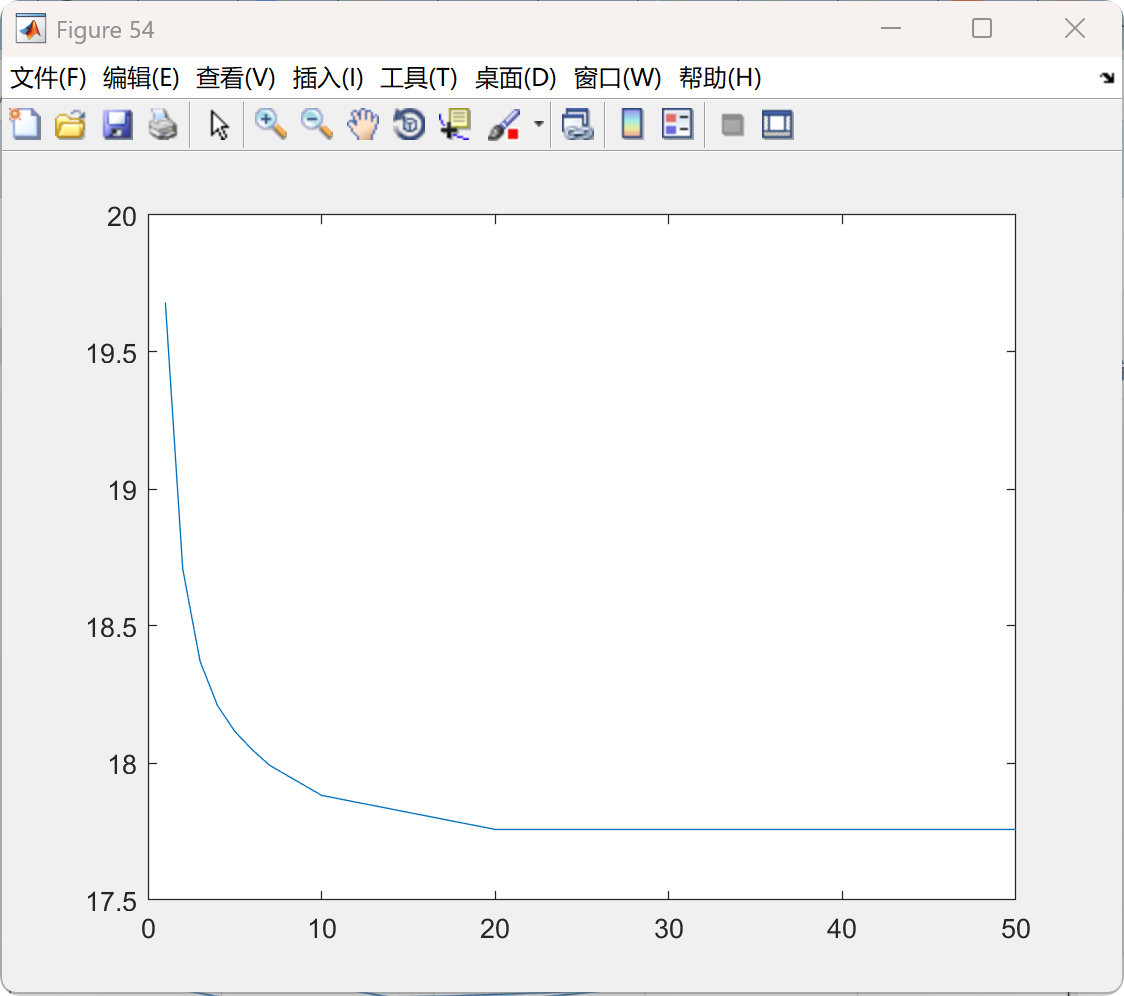
- 迭代优化:重复计算适应度、选择、交叉、变异等操作,不断更新种群,直至满足终止条件,如达到最大迭代次数、适应度值收敛等 。
- 输出结果:当算法终止时,从种群中选取适应度最高的个体,其对应的路径即为规划出的最优或近似最优路径 。
四、优势
全局搜索能力
遗传算法从多个初始解(个体)出发,通过选择、交叉、变异等操作在整个解空间中进行搜索,相比局部搜索算法,不易陷入局部最优解,能够在复杂环境中找到全局较优的路径 。
鲁棒性强
对问题的初始条件和参数设置不敏感,在不同的环境条件和约束下,都能通过进化过程找到可行解,适用于多种类型的机器人和复杂多变的环境 。
并行性好
可以同时处理多个个体(路径),适合在并行计算环境下运行,能够有效提高算法的运行效率,缩短路径规划的时间 。
五、挑战
计算复杂度高
随着问题规模的增大,解空间呈指数级增长,遗传算法需要评估大量个体,计算量剧增,导致算法运行时间较长,对计算资源要求较高 。
参数敏感性
算法性能受种群规模、交叉概率、变异概率等参数影响较大。不同的问题和场景下,最优参数组合不同,需要通过大量实验来调整参数,增加了算法应用的难度 。
路径质量与计算时间的矛盾
为获得更优的路径,需要增加种群规模和迭代次数,但这会延长计算时间,难以满足实时性要求较高的应用场景 。
六、改进方向与应用前景
改进方向
- 混合算法:将遗传算法与其他算法(如 A * 算法、蚁群算法)相结合,发挥不同算法的优势,提高路径规划的效率和质量 。
- 自适应参数调整:设计自适应机制,根据算法运行过程中的状态动态调整种群规模、交叉概率和变异概率等参数,提高算法的适应性和效率 。
- 并行计算优化:进一步优化遗传算法的并行计算策略,充分利用多核处理器、分布式计算等技术,加快算法运行速度 。
应用前景
遗传算法在机器人路径规划领域具有广阔的应用前景。在工业机器人领域,可优化生产线上机器人的作业路径,提高生产效率;在服务机器人领域,如家庭服务机器人、物流配送机器人,能帮助其在复杂室内外环境中规划安全高效的路径;在无人驾驶领域,为车辆在动态交通环境中规划行驶路线 。随着技术的不断发展,遗传算法将在机器人路径规划中发挥更重要的作用,推动机器人技术的进一步发展 。
综上所述,遗传算法为机器人路径规划提供了一种有效的解决方案,尽管面临一些挑战,但通过不断改进和创新,其在机器人领域的应用将更加广泛和深入 。
📚2 运行结果
部分代码:
clc;
clear all;
close all;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
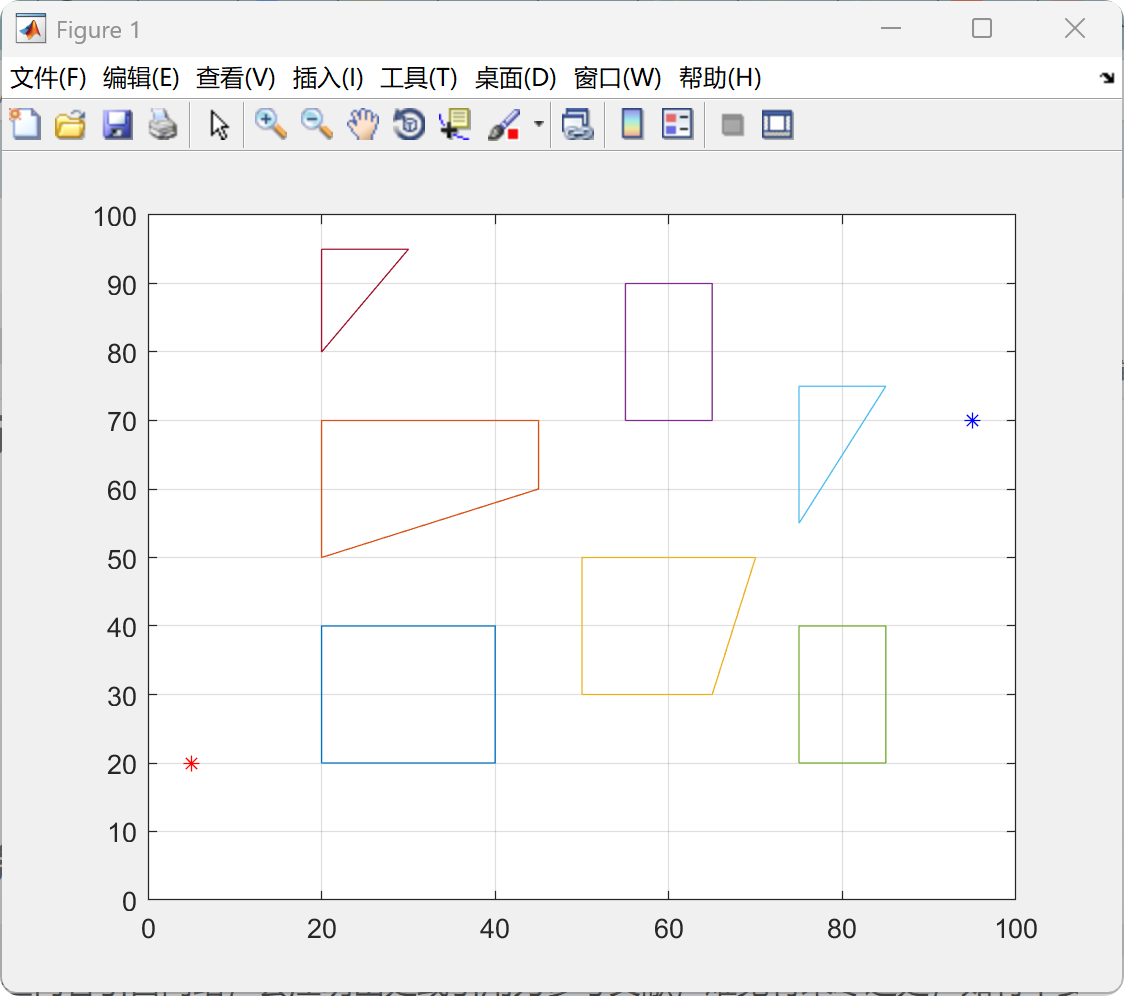
p_start=[5;20];
p_end=[95;70];
plot(p_start(1,1),p_start(2,1),'r*');
hold on
plot(p_end(1,1),p_end(2,1),'b*');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
B1=[20,20,40,40,20;
20,40,40,20,20];
B2=[20,20,45,45,20;
50,70,70,60,50];
B3=[50 50 70 65 50;
30 50 50 30 30];
B4=[55 55 65 65 55;
70 90 90 70 70];
B5=[75 75 85 85 75;
20 40 40 20 20];
B6=[75 75 85 85 75;
55 75 75 75 55];
B7=[20 20 30 20;
80 95 95 80];
plot(B1(1,:),B1(2,:),B2(1,:),B2(2,:),B3(1,:),B3(2,:),B4(1,:),B4(2,:),...
B5(1,:),B5(2,:),B6(1,:),B6(2,:),B7(1,:),B7(2,:));
xlim([0 100])
ylim([0 100])
grid on
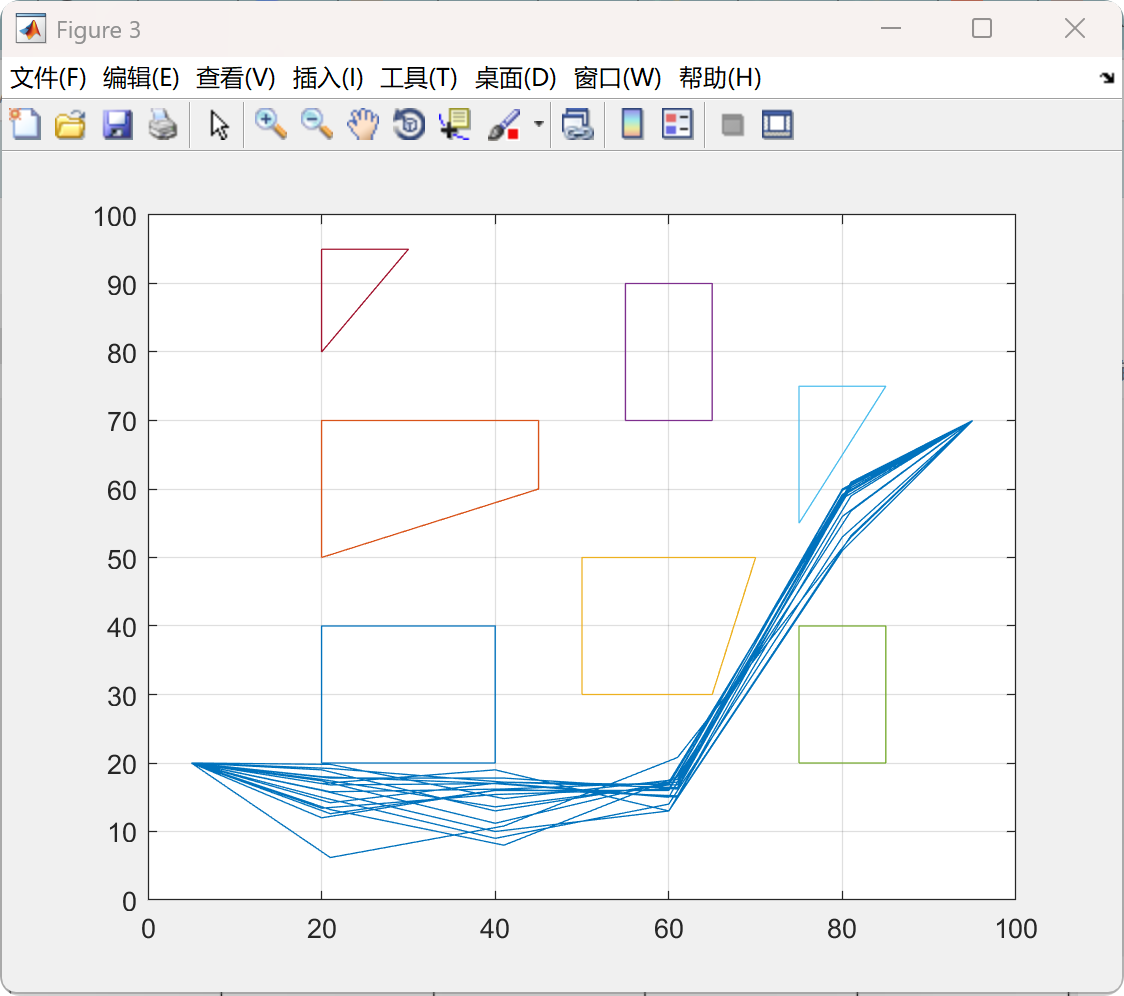
x = ran_point;
popu = ini_pop_maker(x,p_start,p_end);
%%% plotting ini_pop %%%%
hold on
% for i = 1:50
% line([popu(i , 1:2:12)] , [popu(i , 2:2:12)]);
% end
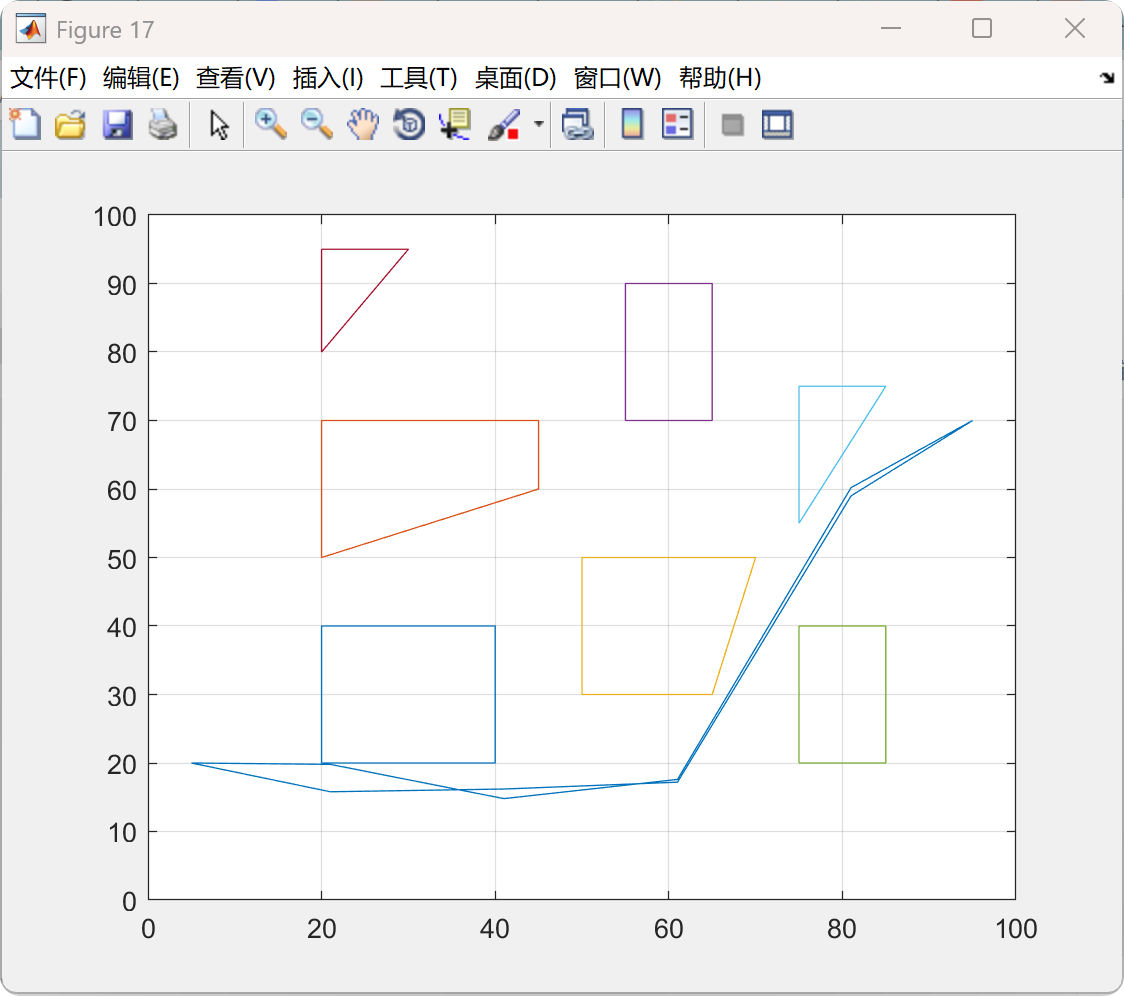
%%% organizing by fittness func %%%
% the safety of the psth is considered in "collision_detector" function by
% adding a bigger border to the main barriers
% by looking at the code we learn that closest path is also the smoothest
% one so the fitness function is just considering the closest path
straight_dist = sqrt((p_start(1,1)-p_end(1,1))^2 + (p_start(2,1)-p_end(2,1))^2)
for i = 1:50
fitness_value(i,1) = fit_calc(popu(i,:));
end
ini_popu = [popu , fitness_value];
ranked_popu = sortrows(ini_popu , 13);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]谢德瀚,高金凤,贾国强,等.融合改进A*与DWA算法的机器人路径规划[J/OL].电子科技,1-13[2025-04-23].https://doi.org/10.16180/j.cnki.issn1007-7820.2026.01.009.
[2]完颜丹丹,孙士保,赵威.结合改进A*和改进DWA的电力巡检机器人路径规划方法[J/OL].机械设计与制造,1-7[2025-04-23].https://doi.org/10.19356/j.cnki.1001-3997.20250417.031.
🌈4 Matlab代码实现


















 3031
3031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









