



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
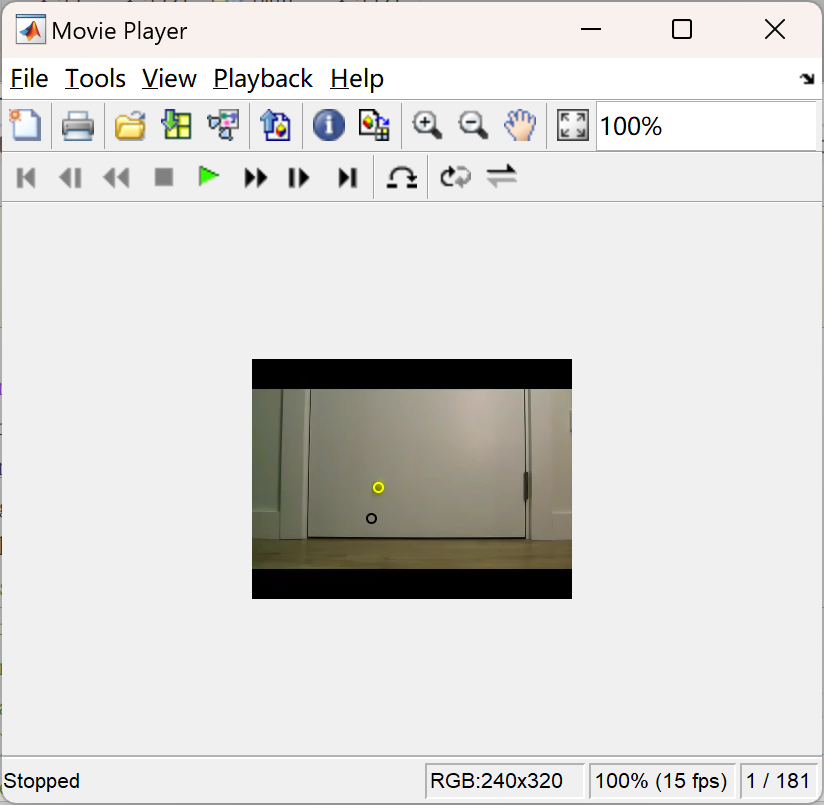
使用卡尔曼滤波进行2D对象跟踪是一种常见的方法,特别适用于动态系统中目标位置的估计和预测。首先,需要对目标进行初始化,包括确定初始位置、速度和加速度等状态信息,以及建立系统模型和测量模型。 当新的测量值可用时,利用测量模型对预测状态进行修正,通过测量值与预测值之间的残差来更新状态估计,并优化状态的不确定性。通过使用卡尔曼滤波进行2D对象跟踪,可以实现对运动目标的准确估计和预测,从而在复杂环境中实现可靠的目标跟踪和定位。
📚2 运行结果
主函数部分代码:
clc;
clear all;
close all;
%% Video Initialization
video_name = 'sample3.mp4'; %Video name
vid = VideoReader(video_name);
nframes = vid.NumberOfFrames; %Number of frames
Height = vid.Height; % Height :)
Width = vid.Width; % Width :)
thr = 10; % Threshold for generating binary image of the noise
%% Kalman Filter Definition
% First, we define the state of interest. In this case, we define the
% following variables for our states: state(t) = [X Y dx dy (d^2)x (d^2)y](t)
% X(t+1) = 1/2(a)T^2 + V(t)T + X(t); where a and V denotes the acceleration
% and velocity respectively.
% V(t+1) = aT + V(t)
% a(t+1) = a(t) ; assuming constant acceleration
%State(t+1) = A.State(t) + B.u + <State Uncertainty|State Noise>
dt=0.5;
% A = [1 0 dt 0 (dt^2)/2 0;
% 0 1 0 dt 0 (dt^2)/2;
% 0 0 1 0 dt 0;
% 0 0 0 1 0 dt;
% 0 0 0 0 1 0;
% 0 0 0 0 0 1];
A = [1 0 dt 0;
0 1 0 dt;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]巩书青,章国宝,朱宏伟.基于核相关滤波器的强噪声焊缝跟踪[J/OL].激光技术:1-13[2024-04-22].http://kns.cnki.net/kcms/detail/51.1125.TN.20240318.1404.004.html.
[2]康忠健,高崇,邵在康,等.基于强跟踪滤波器的水中高频振荡放电参数分析[J/OL].电工技术学报:1-11[2024-04-22].https://doi.org/10.19595/j.cnki.1000-6753.tces.230777.

















 968
968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









