




在真实场景重建、数字孪生与新一代三维表达体系中,3DGS正迅速成为不可忽视的技术方向。凭借在细节保真度、重建效率和真实感上的优势,它让传统基于三维精模、倾斜摄影和网格建模的表达方式,首次在“真实还原”层面显得力不从心。
城市场景-3DGS与倾斜融合
但在真实的工程系统中,几乎不存在只依赖3DGS的完整方案。结构化几何、可交互对象、业务逻辑以及语义与属性承载,仍然高度依赖成熟稳定的传统三维模型体系。工程实践的主流路径,也始终是扩展既有模型应用,而非用3DGS全面替代。
因此,一个关键问题随之出现:能否将3DGS与传统三维模型放在同一场景中协同渲染?
答案是肯定的:但难点并不在“能不能画”,而在于是否画得正确、稳定且具备长期工程可维护性。因为3DGS与传统模型,本质上代表的是两套截然不同的空间假设与渲染哲学,它们的融合,更像是一场发生在渲染架构层级的正面碰撞,而非简单的技术拼接。
坐标体系的碰撞
在3DGS与传统三维模型的融合中,坐标体系是最先出问题、也最容易被忽视的一环。
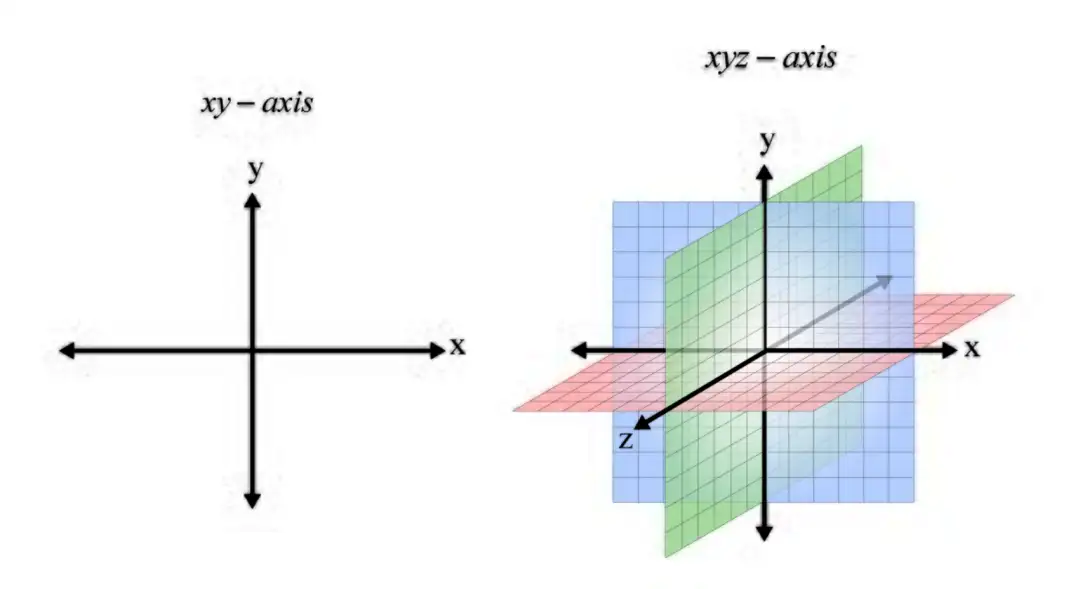
3DGS通常来自COLMAP、Nerfstudio等重建流程,本质上工作在以相机群为中心的局部空间中:
- 原点无语义
- 轴向不固定
- 单位虽多为米,但不保证遵循Y-up/Z-up规范
而传统三维模型恰恰相反,它们始终运行在语义明确、规则稳定的世界坐标系统里,原点、轴向、单位与左右手规则都是系统级前提。
如果在数据阶段没有完成严格的坐标对齐,就将两者直接放入同一场景,漂浮、倾斜、比例失真几乎不可避免。
在shader中“临时掰正”画面,或许能骗过Demo,但在多模型、多数据源的工程系统里只会迅速失控。
坐标问题必须在数据阶段解决,而不是在渲染阶段掩盖。
只有当3DGS与传统模型真正共享同一个World Space,后续关于深度、遮挡与排序的问题才值得继续讨论。
深度与遮挡的摩擦
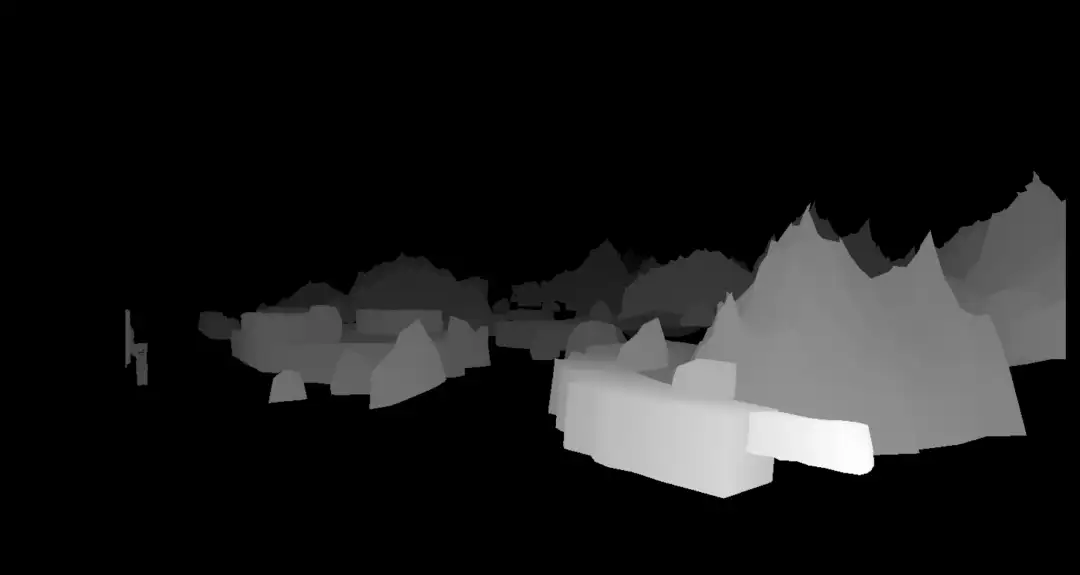
在坐标体系统一之后,第二个必然遇到的问题是深度关系。
在传统的模型渲染中,这个问题几乎不需要开发者关心:
- 模型是不透明的
- GPU会自动记录每个像素的“距离”
- 近的物体自然遮住远的物体
这套机制就是我们常说的深度缓冲(Depth Buffer)。
如果简单地将3D Gaussian Splatting当作普通透明物体插入渲染队列,在实际场景中很容易出现一系列问题:
- 穿模
- 悬浮
- 遮挡关系错误
这并不是参数没调好,而是渲染路径本身就不成立。
因此通常会将传统三维模型与3DGS拆分为不同的渲染阶段:
- 先渲染传统三维模型中的不透明几何
- 完整写入深度缓冲
- 为场景建立稳定、可信的几何结构
- 再渲染3DGS
- 仅读取深度信息
这种策略的核心思想是:几何先行,真实细节后置。结构由Mesh决定,真实感由3DGS补充,而不是相互竞争深度主导权。
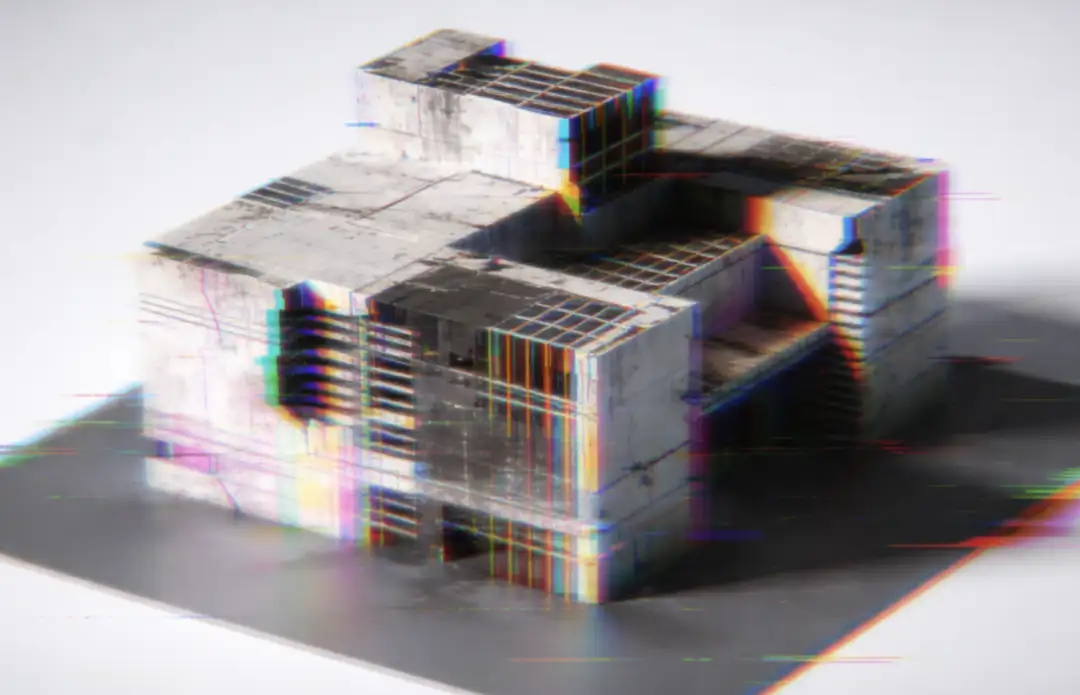
排序的难点

如果说深度测试是传统三维模型世界能够成立的根本规则,那么在融合渲染体系中,排序几乎决定了3DGS是否还是真正的3D。
传统三维模型面对的是拓扑明确、数量有限的几何体,可见性主要依赖深度测试即可稳定解决;即便存在透明物体,也只是少量对象的顺序调整,问题规模始终可控。
而3DGS面对的是海量半透明高斯椭球:
每一个splat都参与颜色与透明度累积,渲染结果对绘制顺序高度敏感,顺序不再是优化项,而是正确性本身。
任何试图让3DGS服从传统renderOrder、或直接塞进透明队列的方案,都会在规模和正确性上同时失效,
最终表现为:
- 体积层次错乱
- 远近反转
- 画面发灰
- 甚至“糊成一团”
因此,在可落地的工程实践中,3DGS必须被视为与传统三维模型并行的渲染体系,而非从属关系:
传统模型继续依赖深度测试,负责建立稳定、可信的空间结构;
3DGS则必须拥有独立的排序体系,在GPU上通过视空间深度、分桶排序或层级裁剪等方式解决自身的可见性问题。
两者只在最终合成阶段以受控方式交互,例如基于深度进行裁剪或遮挡判断,而不是共享同一个透明队列。
只有在这种关系下,3DGS才能呈现出连续、可信的体积感,而不是退化为失序的点云效果。
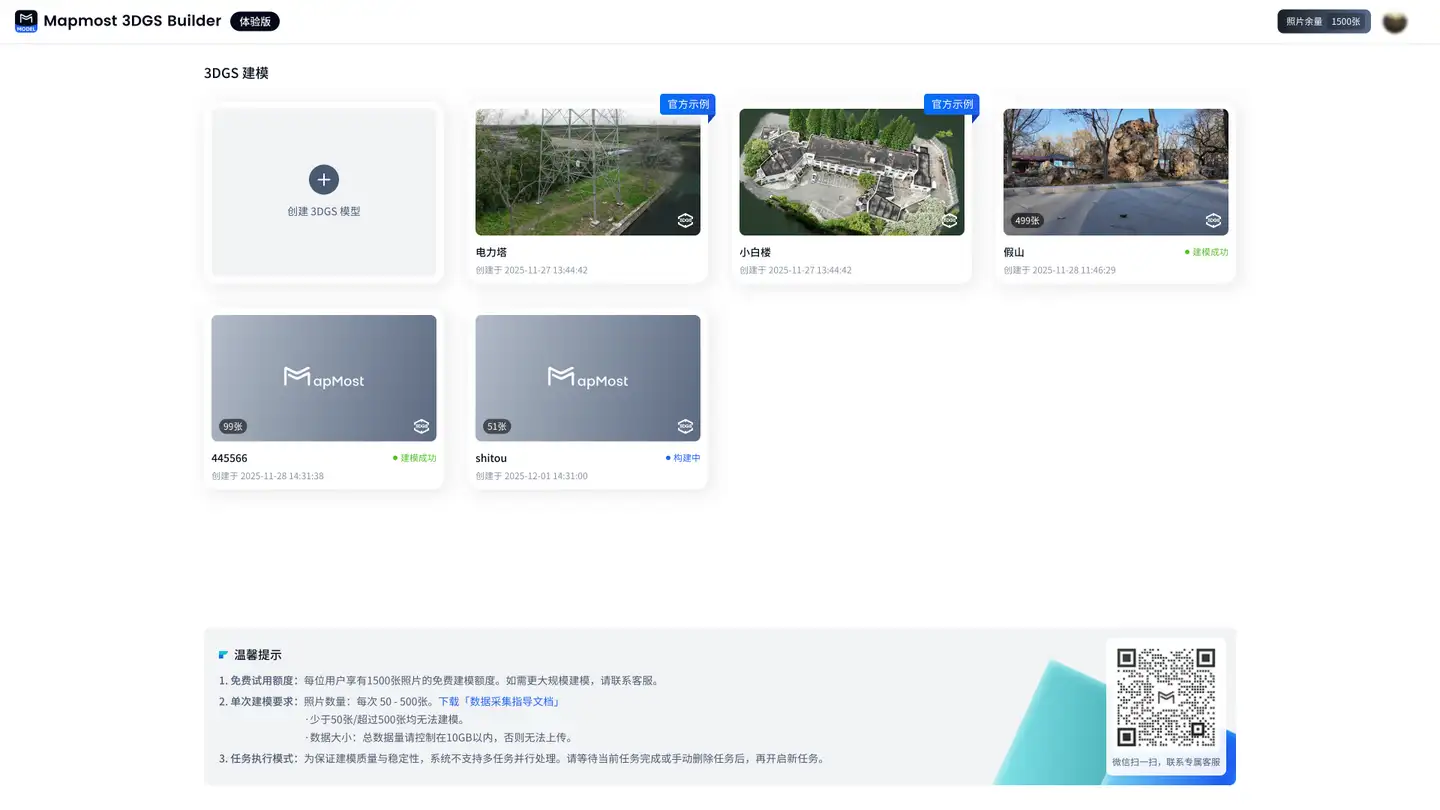
Mapmost的实现
在Mapmost的技术体系中,强调在数据阶段完成坐标体系统一,通过稳定的几何深度计算为3DGS提供可靠的遮挡基础,并采用独立的排序与LOD策略保障大规模场景下的渲染稳定性。
使用Mapmost SDK for WebGL,可实现3DGS与倾斜模型、通用三维模型的融合表达,满足智慧园区、智慧交通等数字孪生应用开发需求。

3DGS与倾斜融合加载效果
申请试用,请至Mapmost官网联系客服
Mapmost 3DGS Builder在线体验版已上线~
欢迎体验: studio.mapmost.com/3dgs

















 2085
2085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









