




从分区训练到流式服务的最后一公里
在3DGS专栏下的《Mapmost分区训练: 让大场景3DGS的建模从此高效且高质》一文中,我们深入剖析了3DGS在应对大地理范围场景时所面临的显存与训练效率挑战,并提出通过空间分治策略实现可扩展建模。
然而,建模只是起点,高效使用才是关键。当用户期望在Web浏览器中流畅探索这些超大规模场景时,新的难题随之而来:如何让消费级显卡甚至移动设备,也能丝滑渲染远超本地显存容量的3DGS模型?

大规模3DGS模型需在Web端流畅渲染
这一问题的答案指向服务化发布——本质上是一套涵盖数据组织、网络传输与客户端渲染的全链路协同优化系统工程。
而本文将聚焦其中最基础却至关重要的环节:数据侧的高效组织。借鉴倾斜摄影模型的发展路径,我们将围绕空间索引构建与多细节层次(LOD)划分两大核心,探讨面向大规模3DGS的数据结构设计。
空间网格构建与细节层级划分
分块化空间索引:将全局场景拆解为“数据砖块”
01.分块索引的关键特性
要实现大规模3DGS场景的服务化发布,意味着我们必须将一个动辄数十GB的“庞然大物”,拆解为一系列空间有序、粒度合理、可独立调度的“数据砖块”。
这种数据分块策略的核心目标,是通过空间逻辑切割,使每个单元具备以下特性:
- 大小均衡:便于网络传输与内存管理;
- 语义局部性:单个块内包含完整的几何与外观信息;
- 嵌入空间索引:每个块可基于层次化索引结构快速查询;
- 可独立加载与剔除:支持按需流式渲染。
其价值直接对应三大工程痛点:
- 突破网络瓶颈:避免一次性传输GB级文件,实现“所见即所传”;
- 缓解显存压力:运行时仅驻留视域内数据,内存占用降低90%以上;
- 消除加载卡顿:小块并行预加载,首屏渲染从分钟级缩短至秒级。
02.现有空间数据组织范式
幸运的是,在智慧城市与高精地图等需求推动下,业界已发展出两类成熟的空间数据组织范式:
- 局部精细场景:以Cesium 3D Tiles为代表,通过四叉树/八叉树构建带LOD的tile树,结合视锥剔除与屏幕空间误差(SSE)实现高效调度;
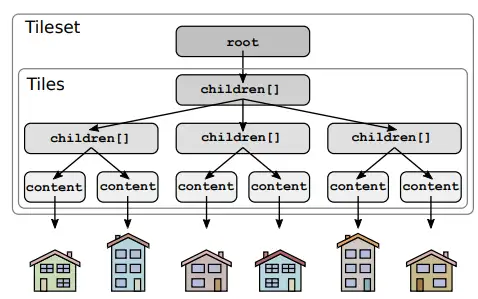
3D Tiles结构树
- 全球尺度覆盖:采用 全球地理瓦片体系(如北斗网格、Google S2、Uber H3或OGC全球瓦片规范),将地球表面划分为多层级规则网格,支持跨城市甚至全球范围的无缝索引。
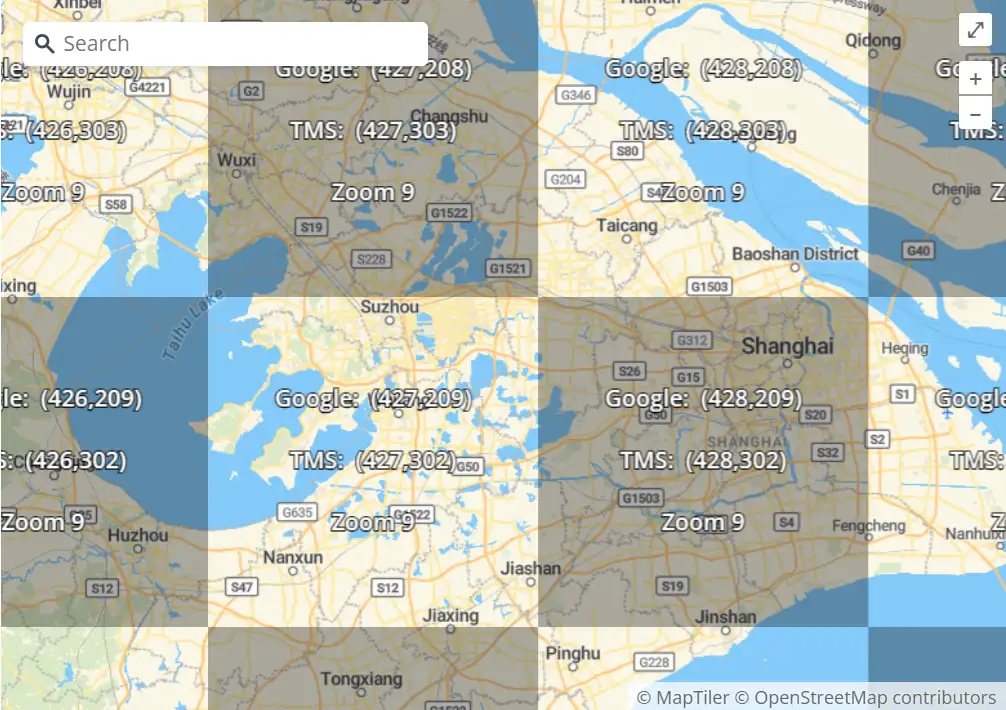
基于瓦片的地图组织方式
这些框架的共同优势在于与底层几何表示解耦:只要将数据按空间区域分块,并提供对应的包围体或地理边界,无论是三角网格、激光点云,还是3DGS中的高斯椭球,均可接入统一的索引与调度体系,为大规模3DGS的流式服务奠定基础。
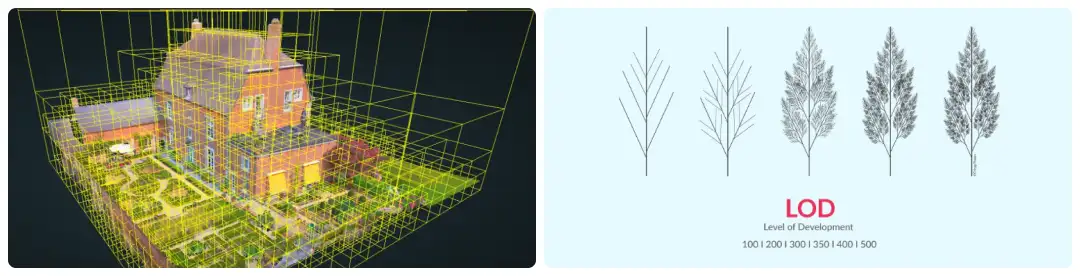
多细节层次:给模型做"智能瘦身",远近皆宜
01.分多细节层次构建的必要性
多细节层次(Level of Detail, LOD)的核心思想是 “近处精细、远处简化” ——根据相机距离与视觉贡献动态调整模型复杂度,避免将宝贵算力浪费在人眼无法感知的细节上。
对于3DGS而言,若全场景统一使用最高精度,将面临两大关键挑战:
- 视觉冗余:远处高斯点密度过高,但单个点在屏幕上的覆盖率极低,人眼难以分辨;
- 计算浪费:大量远端高斯仍参与光栅化,却仅贡献零星像素,严重拖累渲染帧率。
因此,构建高效的LOD体系,成为大规模3DGS流式服务的关键一环。
02.现有技术盘点:合并与抽稀
1. 高斯椭球合并
这是目前较为主流的层次化压缩思路。其核心是将空间邻近、视觉相似的一组高斯椭球,融合为一个更具代表性的综合椭球,在视觉影响尽可能小的前提下显著降低数据密度。
- 融合逻辑:不仅考虑位置、尺寸,还兼顾颜色、协方差方向与不透明度的一致性,确保合并后的椭球能有效“代理”原始群体的辐射贡献;
- 优势:合并通过参数重拟合,在减少数量的同时保留了区域整体的光度与几何特征,更适合处理高斯密集、纹理连续的区域。
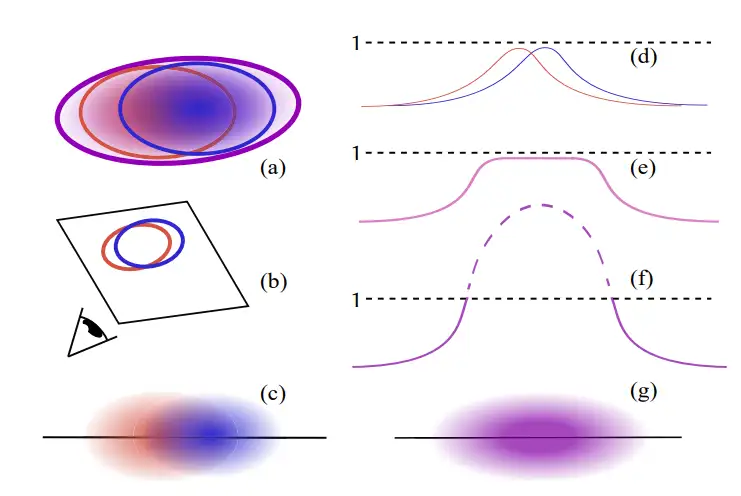
高斯椭球合并示意图(AHierarchical 3D Gaussian Representation for Real-Time Rendering of Very Large Datasets)
2. 结构化抽稀
不同于“以合代简”的思路,结构化抽稀采用重要性驱动的剪枝策略,通过评估每个高斯点对最终图像的贡献度,有选择地移除冗余项。
- 评估指标:基于梯度、透明度、视距贡献度给每个高斯点评分;
- 动态裁剪:移除低分冗余点,保留视觉关键特征;
- 优势:在相同压缩率下,结构信息保留更完整,建筑边缘更清晰。

重要性驱动的3DGS剪枝示意图(LightGaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS)
Mapmost高斯泼溅建模平台:一键发布,高效服务
在可离线部署的Mapmost高斯泼溅建模平台,让超大规模3DGS场景的服务化发布变得前所未有的轻松——只需一次点击,让专业级3D应用触手可及。
平台核心能力包括:
- 统一空间索引:基于地理一致的分块体系,支持跨区域场景无缝集成;
- 自动LOD构建:根据场景内容智能生成多级细节层次,兼顾视觉质量与运行效率;
- 全链路优化:从上传、处理到在线服务,实现分钟级发布与秒级加载。
无需手动切块、调参或部署服务,Mapmost让超大规模3DGS真正“开箱即用”。
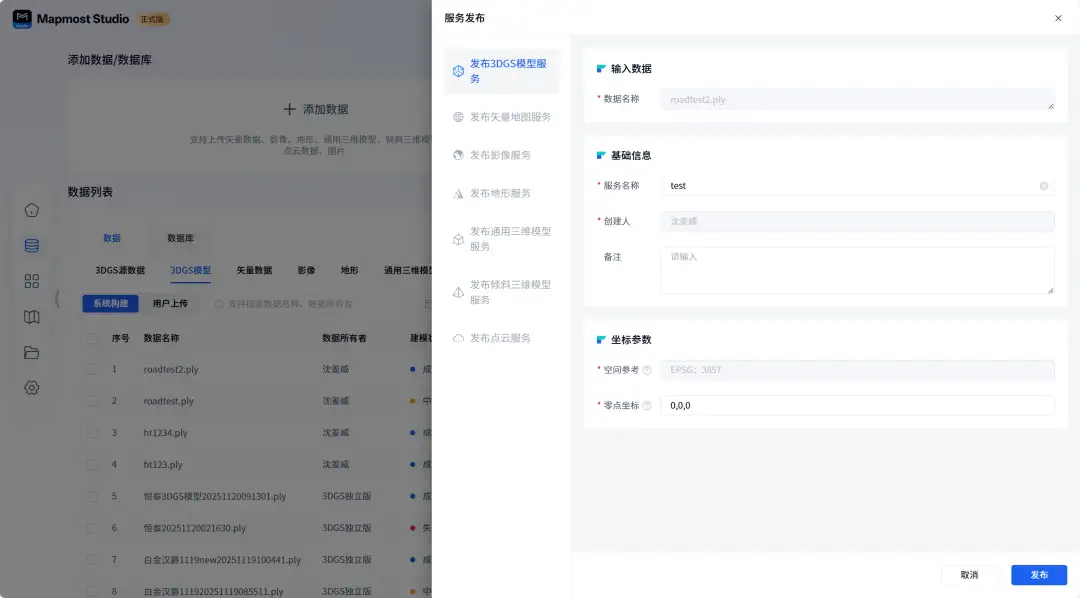
离线版建模平台服务发布参数设置
Mapmost SDK for WebGL 100km²大地理范围3DGS模型渲染
申请试用,请至Mapmost官网联系客服
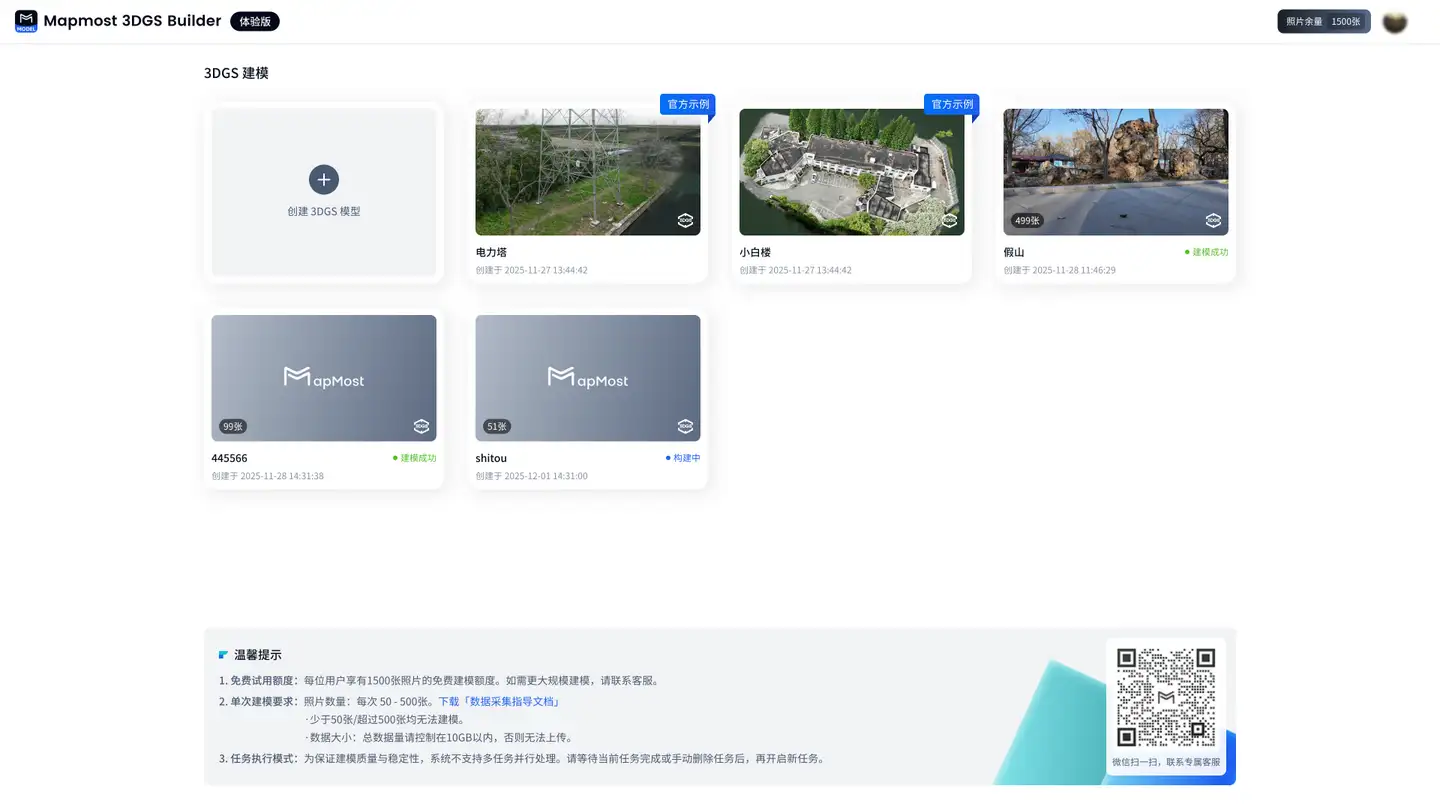
Mapmost 3DGS Builder在线体验版已上线~
欢迎体验: studio.mapmost.com/3dgs

















 2078
2078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









