




“拍”一个GS模型只要几分钟,建一个GS模型可选的工具也很多,但是模型放进网页里难以旋转,永远卡不到你想看的那个角度,应该怎么办?
更进一步,如果我想把模型放到地图上的实际位置,对模型和周围地理环境有更深入的联动,这时候又该怎么办?
相信看完这篇文章,你不仅能轻松拿捏小模型的各个角度,大范围的高斯模型配准到地图也是能手到擒来。
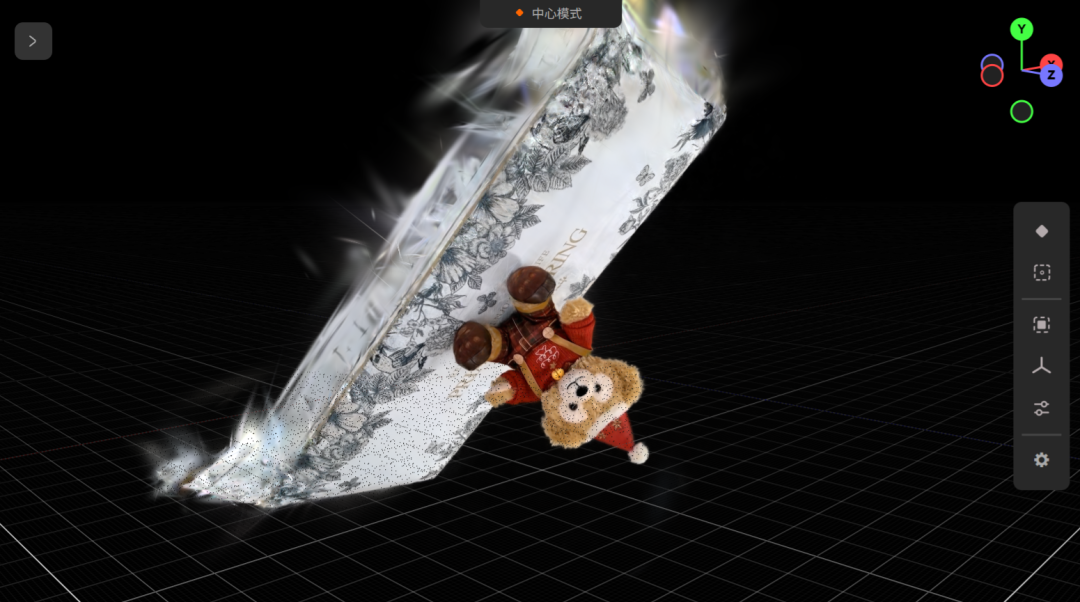
为什么小熊的角度奇奇怪怪的?
了解两个坐标系,轻松旋转查看模型
想要能自如的旋转模型,只需要了解两个坐标系。
以后不管是高斯模型、点云或OBJ等各类数据,在各式查看器中的自如观看都不在话下。
现在解密一下这两个坐标系:
- 物体坐标系:即模型自身有个XYZ三轴
- 世界坐标系:即查看器预先定义好的XYZ三轴
是不是看懵了,说啥呢。别急,让我以下面的小熊模型来详细讲解一下。
首先我们一般可以看到,查看器右上角有个很明显的XYZ轴。我们刚进入查看器后什么都别动,XYZ这个初始的方向就是世界坐标系的指向,我们只需要关心指向上方的是哪根轴就行。这个场景中就是Y轴。

下面就是关键了,我们要将模型的Y轴对齐世界坐标系的Y轴。
有人可能要问了:小熊又没有这些红红绿绿的轴,我又不知道哪个是Y轴,还对齐呢?
我们可以想象一下,Y是向上的,那这个小熊模型是不是也应该向上,那什么应该是向上的呢?
很明显吧,我们只需要把小熊的红帽子旋转向上,那小熊肯定就自然和世界坐标系对齐了。
这样一通旋转完,小熊我们就可以方便的查看啦。
大模型叠加地图
这小熊模型我随便转转看看,没啥精度要求,难度太低。要是想把东方之门、阳澄湖那么大区域的高斯模型对齐到地图,融入到GIS的测量、分析、决策与运维流程该怎么办呢?
我们首先要做的工作是配准,将模型配准到地图上。
进行配准需要了解坐标系:
众所周知,地球是个三维椭球,而我们平时看的地图都是二维平面,这里涉及到两个坐标系了;再加上模型的坐标系,就是三个坐标系了。
平常无人机图像自带的经纬度就是三维椭球的坐标系,一般来说常用的为WGS84坐标系;平面地图的坐标系一般来说常用的是墨卡托投影坐标系。在国际标准下,这两者常用的代码是EPSG:4326和EPSG:3857。
而配准一般步骤如下:
01地图选点
从地图上选取一些特征点,地图上获取的点如果是经纬度,需要将其转换到EPSG:3857坐标系下的平面坐标。

平面地图选点
02模型选点
模型侧则首先要将colmap结果点云导入进CloudCompare之类的点云处理工具,然后选取与地图上选择的相同的点,记录其坐标,即模型坐标系下坐标。

CloudCompare工具选取模型点
03变换矩阵计算
之后我们可以使用最小二乘等算法,计算两组坐标间最佳的旋转变换矩阵(上一步选取的点越多,最终配准结果越准确)。
04变换模型
最终我们还要对高斯模型的位置、旋转等相关属性应用这个矩阵才能完成配准,将模型放上地图。

模型叠加地图
如何一步完成叠加
把模型“摆”到地图上,传统做法得先闯三关坐标系、再踩四步配准坑;来一个新模型就全套重来,人工量直接拉满。
Mapmost 高斯泼溅建模平台,让这套苦差事变成“无人区”:
照片带 GPS?
平台自动读取,建完模型一秒缩放+旋转,稳稳落到真实地理位置;
照片没 GPS?
空三后的随机坐标系也能被扳正,再也不怕像“小熊”弯头转向的。
无人机拍完→上传→自动配准,整条链路零手工、零代码,真正的“一键到地”。
快来试试吧!
Mapmost 高斯泼溅建模平台,坐标系烦恼到此为止,现在就把飞机升空,剩下的交给Mapmost!
申请试用,请至Mapmost官网联系客服
Mapmost 3DGS Builder在线体验版已上线~
欢迎体验: studio.mapmost.com/3dgs

















 1531
1531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









