




文章目录
Oja’s rule
这俩天看了Oja的俩篇论文,被其中的证明弄得云里雾里,但愿我的理解没有出太大问题吧。
Oja’s rule Wiki
Oja’s rule 知乎
- A Simplified Neuron Model as a Principal Component Analyzer
- On Stochastic Approximation of Eigenvectors and Eigenvalues of the Expectation of a Random Matrix
背景
貌似是关于神经网络,权重的无监督训练的。有趣的是,由这个出发点,可以得到一种关于stream PCA的算法,即Oja’s rule。
Hebbian learning
在Hebb的假说中,对于权重的调整为:
△
w
i
=
η
x
i
y
\bigtriangleup w_i = \eta x_iy
△wi=ηxiy
where:
y
=
∑
j
w
j
x
j
y = \mathop{\sum}\limits_{j}w_jx_j
y=j∑wjxj
在stream PCA表述为这样的算法:
X
~
k
=
X
k
−
1
+
A
k
X
k
−
1
Γ
k
\widetilde{X}_k = X_{k-1} + A_kX_{k-1}\varGamma_k
X
k=Xk−1+AkXk−1Γk
X
k
=
X
~
k
R
k
−
1
X_k = \widetilde{X}_kR_k^{-1}
Xk=X
kRk−1
where:
X
k
X_k
Xk就是每一次迭代所得的正交矩阵,
A
k
A_k
Ak为随机矩阵,在stream PCA里面,一般
A
k
=
z
k
z
k
⊤
∈
R
d
×
d
A_k = z_kz_k^{\top} \in \mathbb{R}^{d \times d}
Ak=zkzk⊤∈Rd×d,
Γ
k
\varGamma_k
Γk是一个对角矩阵,每个对角元素表示对应列向量的学习率。
R
k
−
1
R_k^{-1}
Rk−1怎么说呢,
X
k
=
Q
R
X_k=QR
Xk=QR这个
Q
R
QR
QR分解,
R
k
−
1
R_k^{-1}
Rk−1就是
R
R
R的逆。
当只需要最大特征值所对应的特征向量的时候:
x
~
k
=
x
k
−
1
+
γ
k
A
k
x
k
−
1
\widetilde{x}_k = x_{k-1} + \gamma_kA_kx_{k-1}
x
k=xk−1+γkAkxk−1
x
k
=
x
~
k
/
∥
x
~
k
∥
x_k = \widetilde{x}_k/\|\widetilde{x}_k\|
xk=x
k/∥x
k∥
这个式子到底啥含义呢,为什么会这样呢?
Oja给出的分析是(大概是这样):
x
k
x_k
xk关于
γ
k
\gamma_k
γk的泰勒展式(只到一次项)是:
x
k
=
x
k
−
1
+
γ
k
[
A
k
x
k
−
1
−
(
x
k
−
1
⊤
A
k
x
k
−
1
)
x
k
−
1
]
+
γ
k
b
k
x_k = x_{k-1} + \gamma_k[A_kx_{k-1}-(x_{k-1}^{\top}A_kx_{k-1})x_{k-1}] + \gamma_kb_k
xk=xk−1+γk[Akxk−1−(xk−1⊤Akxk−1)xk−1]+γkbk
where:
b
k
=
o
(
γ
k
)
b_k = o(\gamma_k)
bk=o(γk)这个地方我有个疑问,不知道是我对论文的理解不对还是如何,我觉得如果
b
k
=
o
(
γ
k
)
b_k = o(\gamma_k)
bk=o(γk),那么前面就不必再乘上个
γ
k
\gamma_k
γk了。
还要注意的一点是,上面的推导用到了:
∥
x
k
−
1
∥
=
1
\|x_{k-1}\|=1
∥xk−1∥=1的条件。
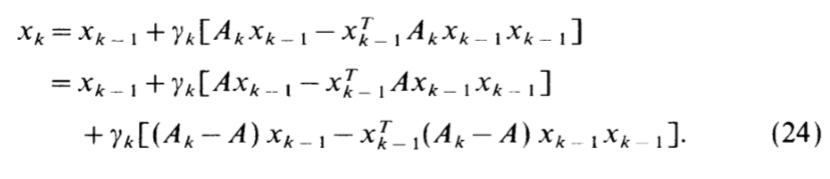
上面的式子还可以有另外一种写法:
x
k
=
x
k
−
1
+
γ
k
[
A
x
k
−
1
−
(
x
k
−
1
⊤
A
x
k
−
1
)
x
k
−
1
⊤
x
k
−
1
x
k
−
1
]
+
γ
k
[
(
A
k
−
A
)
x
k
−
1
−
(
x
k
−
1
⊤
(
A
k
−
A
)
x
k
−
1
)
x
k
−
1
]
+
γ
k
b
k
x_k = x_{k-1} + \gamma_k[Ax_{k-1}-\frac{(x_{k-1}^{\top}Ax_{k-1})}{x_{k-1}^{\top}x_{k-1}}x_{k-1}] +\gamma_k[(A_k-A)x_{k-1}-(x_{k-1}^{\top}(A_k-A)x_{k-1})x_{k-1}] + \gamma_kb_k
xk=xk−1+γk[Axk−1−xk−1⊤xk−1(xk−1⊤Axk−1)xk−1]+γk[(Ak−A)xk−1−(xk−1⊤(Ak−A)xk−1)xk−1]+γkbk
这个式子只是对上面的加项减项处理,并不难推导。注意,请想象
E
(
A
k
)
=
A
E(A_k) = A
E(Ak)=A
保留右边前俩项:
△
x
k
≈
γ
k
[
A
x
k
−
1
−
(
x
k
−
1
⊤
A
x
k
−
1
)
x
k
−
1
⊤
x
k
−
1
x
k
−
1
]
\bigtriangleup x_k \approx \gamma_k[Ax_{k-1}-\frac{(x_{k-1}^{\top}Ax_{k-1})}{x_{k-1}^{\top}x_{k-1}}x_{k-1}]
△xk≈γk[Axk−1−xk−1⊤xk−1(xk−1⊤Axk−1)xk−1]
连续情况下就可以得到形如下面的微分方程:
d
z
d
t
=
A
z
−
(
z
⊤
A
z
)
z
⊤
z
z
\frac{dz}{dt}=Az-\frac{(z^{\top}Az)}{z^{\top}z}z
dtdz=Az−z⊤z(z⊤Az)z
微分方程的内容我忘得差不多了,这个方程的解法大概是这样的:
z
:
=
∑
i
η
(
i
)
(
t
)
c
i
z := \mathop{\sum}\limits_{i}\eta^{(i)}(t)c_i
z:=i∑η(i)(t)ci
where:
c
i
c_i
ci是矩阵
A
A
A的按特征值由大到小排列的单位特征向量。
这时,上面的微分方程可以分解为
d
d
d(论文里纬度是
n
n
n)个子微分方程:
d
η
(
i
)
d
t
=
λ
(
i
)
η
(
i
)
−
(
z
⊤
A
z
)
z
⊤
z
η
(
i
)
\frac{d\eta^{(i)}}{dt}=\lambda^{(i)}\eta^{(i)}-\frac{(z^{\top}Az)}{z^{\top}z}\eta^{(i)}
dtdη(i)=λ(i)η(i)−z⊤z(z⊤Az)η(i)
令:
ζ
(
i
)
=
η
(
i
)
/
η
(
1
)
\zeta^{(i)}=\eta^{(i)}/\eta^{(1)}
ζ(i)=η(i)/η(1) (
η
(
1
)
(
t
)
≠
0
\eta^{(1)}(t) \neq \mathbf{0}
η(1)(t)̸=0),容易推得(是真的不是假的):
d
ζ
(
i
)
d
t
=
(
λ
(
i
)
−
λ
(
1
)
)
ζ
(
i
)
\frac{d\zeta^{(i)}}{dt}=(\lambda^{(i)} - \lambda^{(1)})\zeta^{(i)}
dtdζ(i)=(λ(i)−λ(1))ζ(i)
可以推得其解为:
ζ
(
i
)
(
t
)
=
e
x
p
[
(
λ
(
i
)
−
λ
(
1
)
)
t
]
ζ
(
i
)
(
0
)
\zeta^{(i)}(t)=exp[(\lambda^{(i)} - \lambda^{(1)})t]\zeta^{(i)}(0)
ζ(i)(t)=exp[(λ(i)−λ(1))t]ζ(i)(0)
从这个式子可以看到,只要
η
(
1
)
(
t
)
≠
0
\eta^{(1)} (t)\neq \mathbf{0}
η(1)(t)̸=0,那么其他成分,随着时间的增长,会趋于0,所以最后
z
z
z会成为
c
1
c_1
c1。
上面的算法的内涵就是其线性主部满足这个性质。上面微分方程还有另外一个性质:
∥
z
(
0
)
∥
=
1
\|z(0)\|=1
∥z(0)∥=1则
∥
z
(
t
)
∥
=
1
,
t
>
0
\|z(t)\|=1,t>0
∥z(t)∥=1,t>0(通过求导,导数为0可以验证!)
这也就是说,我们只要保证第一次,后面的大小也可以同样保证。当然,这些条件是在连续情况下推导的,实际在离散的情况下,我们要求
γ
k
\gamma_k
γk足够小。
主要的一些理论
论文里面一些主要的假设
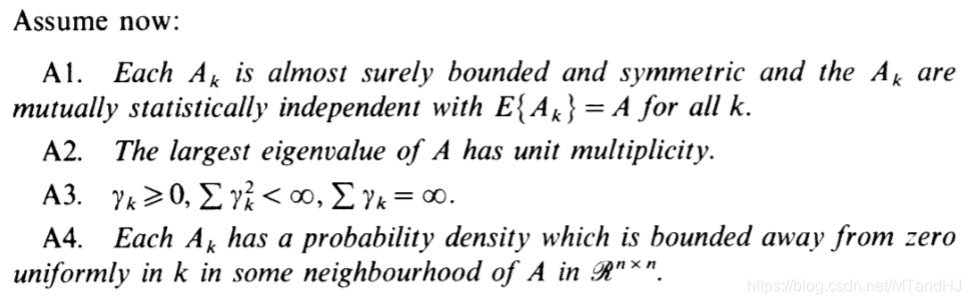

我不怎么理解的地方是这个unit multiplicity,是特征值是唯一的吗(从证明中看似乎是这样的)?
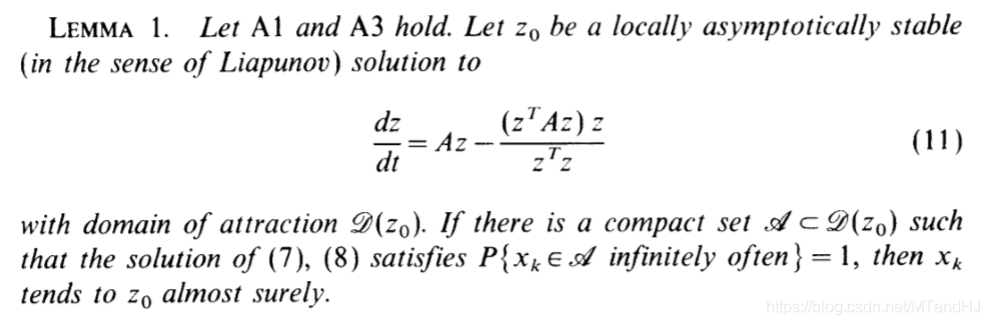
引理1
引理2

引理3

(7) (8)就是上面的
x
k
x_k
xk的迭代算法:
x
~
k
=
x
k
−
1
+
γ
k
A
k
x
k
−
1
\widetilde{x}_k = x_{k-1} + \gamma_kA_kx_{k-1}
x
k=xk−1+γkAkxk−1
x
k
=
x
~
k
/
∥
x
~
k
∥
x_k = \widetilde{x}_k/\|\widetilde{x}_k\|
xk=x
k/∥x
k∥
定理1

下面Oja开始讨论 X k X_k Xk的迭代算法:
LEMMA 3(ALL)
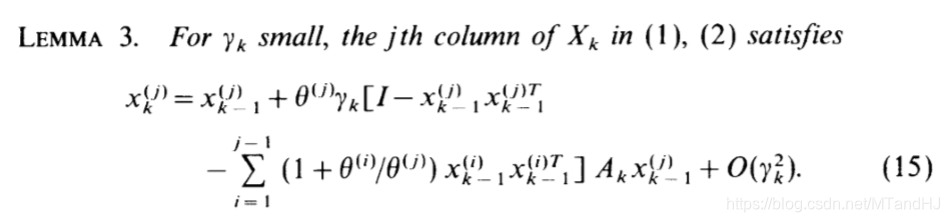
(1)(2)是关于
X
k
X_k
Xk的迭代算法。
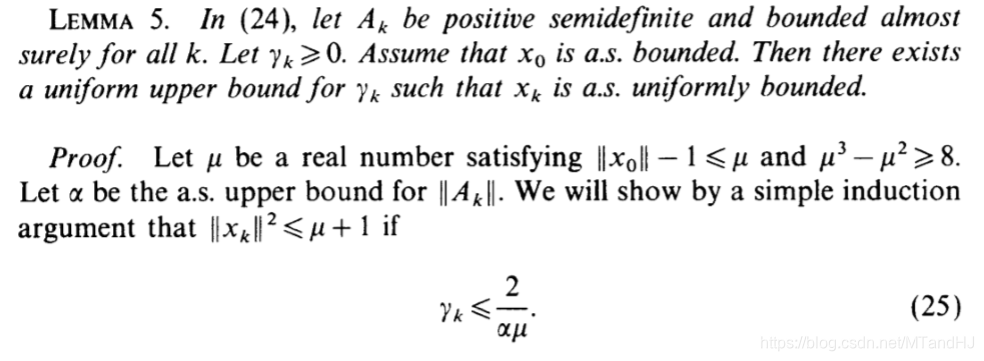
引理 4

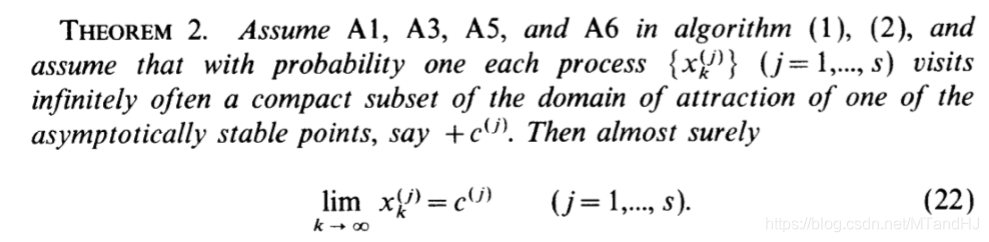
定理 2
定理 3(关于特征值)
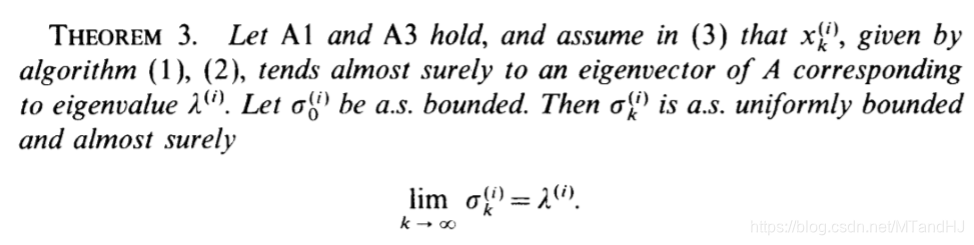
关于
σ
\sigma
σ的迭代算法,即(3):
σ
k
(
i
)
=
(
1
−
γ
k
)
σ
k
−
1
(
i
)
+
γ
k
(
x
k
−
1
(
i
)
A
k
x
k
−
1
(
i
)
)
\sigma_k^{(i)}=(1-\gamma_k)\sigma_{k-1}^{(i)}+\gamma_k(x_{k-1}^{(i)}A_kx_{k-1}^{(i)})
σk(i)=(1−γk)σk−1(i)+γk(xk−1(i)Akxk−1(i))
Oja’s rule
Oja’s rule 是对 Hebbian learning 的改进:
可以发现,其实Oja’s rule就是取了前面的线性主部。
相应的微分方程变为:
d
z
d
t
=
A
z
−
(
z
⊤
A
z
)
z
\frac{dz}{dt}=Az-(z^{\top}Az)z
dtdz=Az−(z⊤Az)z
性质有所欠缺,但是,在一定条件下依然可以保证一些良性。
引理 5(关于 γ k \gamma_k γk的选择)
定理 3

注意,当推广到求解
X
k
X_k
Xk的时候有俩种:
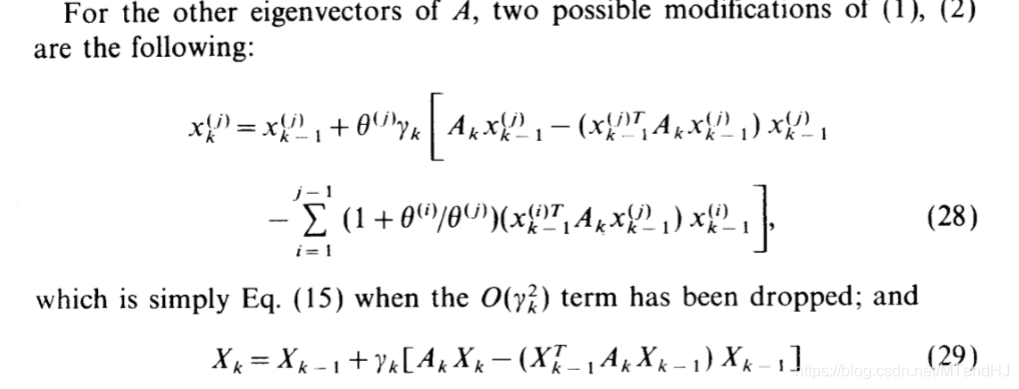
(29)的列不一定是相应的特征向量,但列所构成的子空间是一致的!
数值实验
我们先用均匀分布产生一个基础向量x,再在其上添加由标准正态分布所生成噪声,得到一串向量,来模拟数据。
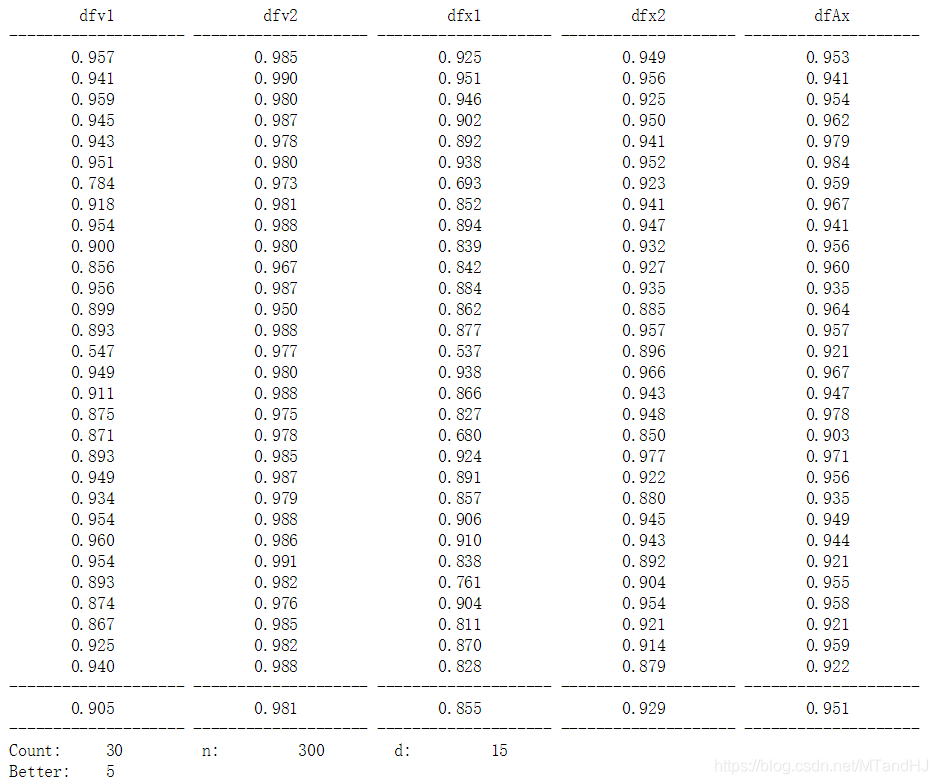
dfv1: Hebbian方法得到的向量与特征向量的cos值
dfv2: Oja方法得到的向量与特征向量的cos值
dfx1: Hebbian方法得到的向量与x的cos值
dfx2: Oja方法得到的向量与x的cos值
dfAx: x与特征向量的cos值
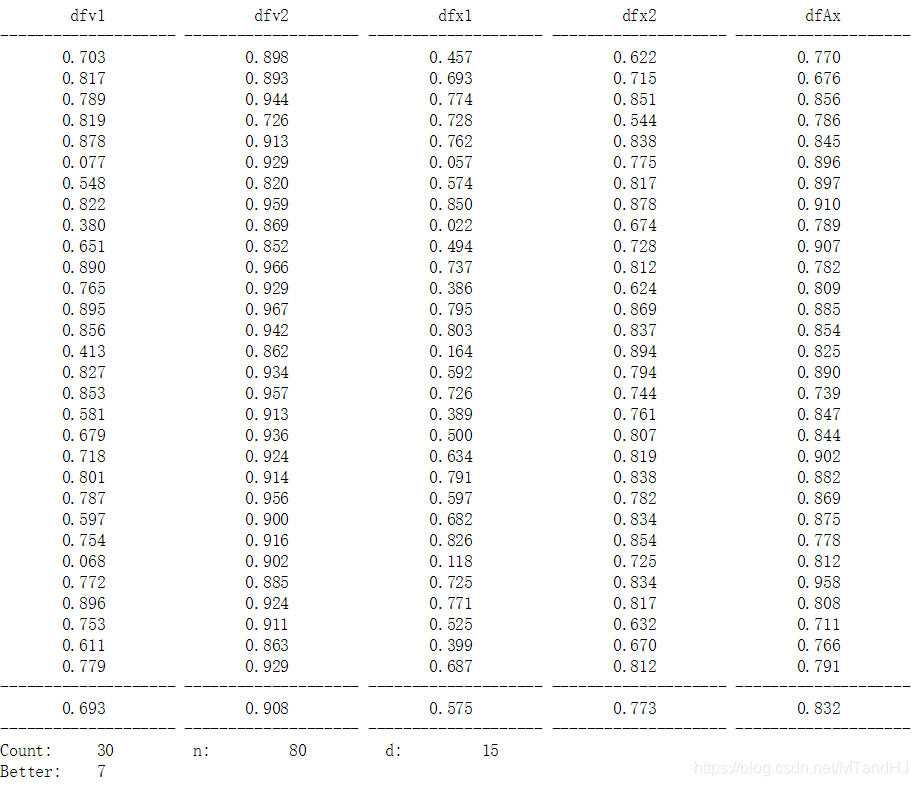
用Oja’s rule 大概80次就能到达0.90的水准,与x的差距也不大,有7次比特征向量还要好!而Hebbian learning 大概300次。当然,这可能与我对步长的调整有关系,但是说实话,我已经尽力了。
代码
import numpy as np
def Oja_rule_1(x_old, z, r): #实际上好像不是Oja's 修正Hebbian learning
x = x_old + r * np.dot(x_old, z.T.dot(z))
x = x / np.sqrt(x @ x)
return x
def Oja_rule_2(x_old, z, r):
x = x_old + r * (x_old @ (z.T @ z) - x_old @ (z.T @ z) @ x_old * x_old)
return x
def D2D(x, y): #计算cos值,Oja的论文用的是2范数
return abs(x @ y)
def Main(d, n):
x = np.array([np.random.rand() for i in range(d)])
x = x / np.sqrt(x @ x)
A = np.array([ x + [np.random.randn() for j in range(d)] for i in range(n)])
#以上是生成数据
A_vector = np.linalg.eig(A.T.dot(A))[1][:,0] #数据的主特征向量
x_new_1 = np.array([np.random.rand() for i in range(d)])
#print(x_new_1)
x_new_1 = x_new_1 / np.sqrt(x_new_1 @ x_new_1)
x_new_2 = x_new_1
for i in range(n):
z = A[i,:]
r1 = np.log(i + 2) / (i + 1) # 按照论文的理解,是不需要加乘上log部分的,可是不加log部分的效果也忒差了
r2 = 2 / max((3 * z @ z), i + 1)
z.resize(1,len(z))
x_new_1 = Oja_rule_1(x_new_1, z, r1)
x_new_2 = Oja_rule_2(x_new_2, z, r2)
x_new_2 = x_new_2 / np.sqrt(x_new_2 @ x_new_2)
dfv1 = D2D(A_vector, x_new_1)
dfv2 = D2D(A_vector, x_new_2)
dfx1 = D2D(x, x_new_1)
dfx2 = D2D(x, x_new_2)
dfAx = D2D(A_vector, x)
return dfv1, dfv2, dfx1, dfx2, dfAx
def Summary(times, d, n):
print('{0:^20} {1:^20} {2:^20} {3:^20} {4:^20}'.format('dfv1', 'dfv2', 'dfx1', 'dfx2', 'dfAx'))
print('{0:-<20} {0:-<20} {0:-<20} {0:-<20} {0:-<20}'.format(''))
M = np.array([0.] * 5)
Better = 0
for time in range(times):
result = Main(d, n)
M += result
if result[-2] > result[-1]:
Better += 1
print('{0[0]:^20.3f} {0[1]:^20.3f} {0[2]:^20.3f} {0[3]:^20.3f} {0[4]:^20.3f}'.format(result))
print('{0:-<20} {0:-<20} {0:-<20} {0:-<20} {0:-<20}'.format(''))
print('{0[0]:^20.3f} {0[1]:^20.3f} {0[2]:^20.3f} {0[3]:^20.3f} {0[4]:^20.3f}'.format(M / times))
print('{0:-<20} {0:-<20} {0:-<20} {0:-<20} {0:-<20}'.format(''))
print('{0:<10} {1:<10} {2:<10} {3:<10} {4:<10} {5:<10}'.format('Count:', times, 'n:', n, 'd:', d))
print('{0:<10} {1:<20}'.format('Better:', Better))
Summary(30, 15, 300)

















 992
992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









