 Odrive0.5.1-FOC电机控制核心代码实现
Odrive0.5.1-FOC电机控制核心代码实现





00 前言
研究FOC电机控制核心代码 Odrive motor.cpp(.hpp)Foc代码实现
01 bool Motor::arm()
这段代码是 ODrive 电机 PWM 驱动的 "预启动(Arming)" 逻辑,它的核心作用是 准备 PWM 输出但不立即激活,确保电机在安全条件下启动。
bool Motor::arm() {
// Reset controller states, integrators, setpoints, etc.
axis_->controller_.reset(); // 重置位置/速度环控制器(如清空PID积分器)
reset_current_control(); // 重置电流环控制器(如清空Iq/Id积分器)
// Wait until the interrupt handler triggers twice. This gives
// the control loop the correct time quota to set up modulation timings.
if (!axis_->wait_for_current_meas())
return axis_->error_ |= Axis::ERROR_CURRENT_MEASUREMENT_TIMEOUT, false;
next_timings_valid_ = false; // 标记"下一次PWM调制信号尚未准备好"
safety_critical_arm_motor_pwm(*this); // 安全关键操作:解锁PWM硬件
return true;
}// 重置电流环控制器(如清空Iq/Id积分器)
void Motor::reset_current_control() {
current_control_.v_current_control_integral_d = 0.0f;
current_control_.v_current_control_integral_q = 0.0f;
current_control_.acim_rotor_flux = 0.0f;
current_control_.Ibus = 0.0f;
}02 void Motor::update_current_controller_gains()
这段代码是 ODrive 电流环控制器参数(PID 增益)的自动调谐逻辑。它基于电机的 相电阻(phase resistance) 和 相电感(phase inductance) 动态计算电流环的 比例增益(P gain) 和 积分增益(I gain)。这是 ODrive 实现 高性能电流控制 的关键部分。
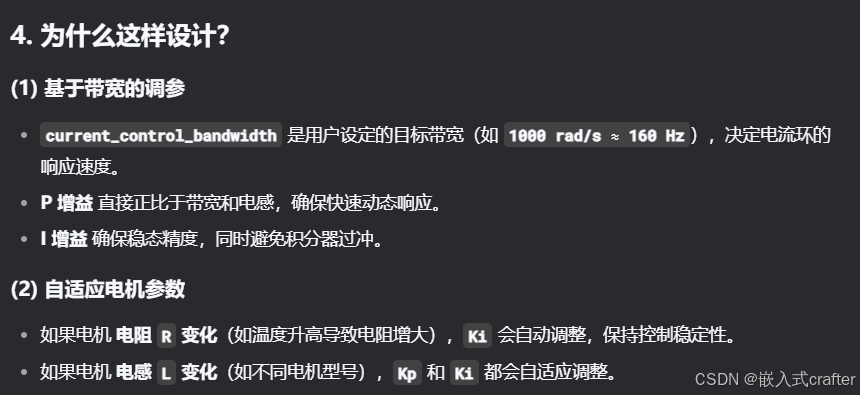
根据电机参数(phase_inductance 和 phase_resistance)和控制带宽(current_control_bandwidth),自动计算电流环的 P 增益 和 I 增益。这是一种基于模型的控制器调参(Model-Based Tuning),确保电流环的动态响应最优。
当电机相电阻(phase_resistance) 或 相电感(phase_inductance) 发生变化时调用(例如温度变化导致电阻变化,或更换电机后参数不同)。
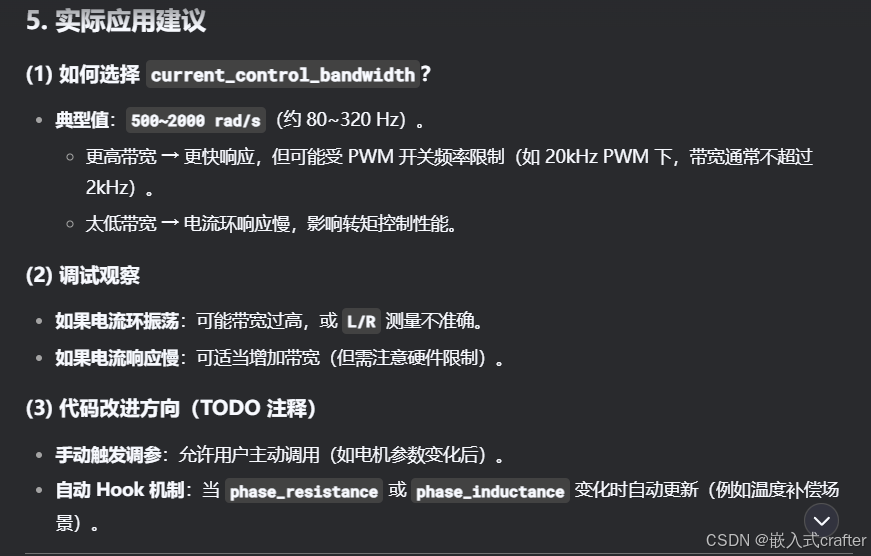
开发者提到未来可能支持手动触发调参 或 自动 Hook 机制(目前需外部调用)。
// @brief Tune the current controller based on phase resistance and inductance
// This should be invoked whenever one of these values changes.
// TODO: allow update on user-request or update automatically via hooks
void Motor::update_current_controller_gains() {
// Calculate current control gains
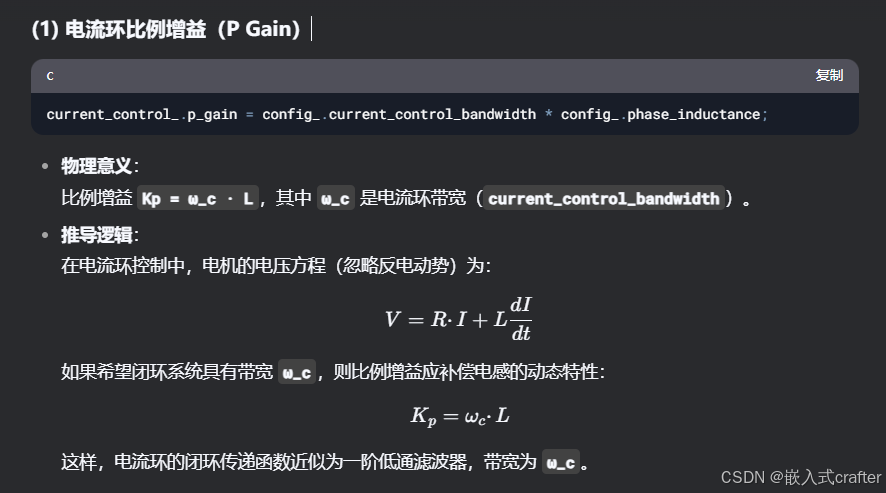
current_control_.p_gain = config_.current_control_bandwidth * config_.phase_inductance;
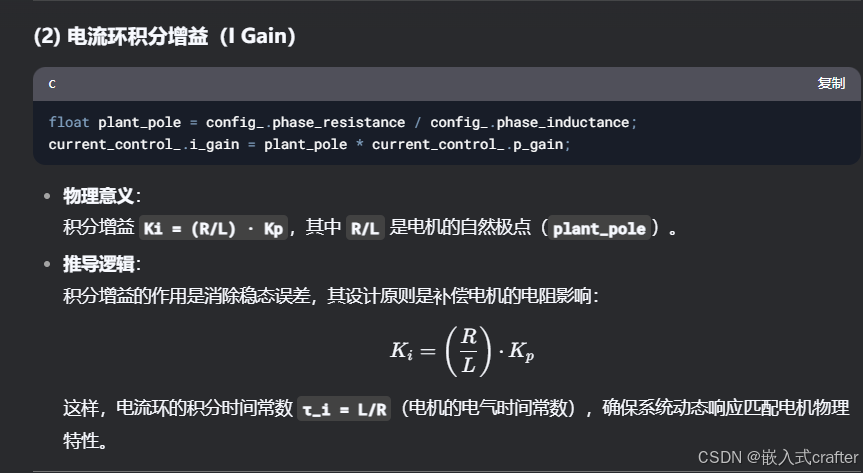
float plant_pole = config_.phase_resistance / config_.phase_inductance;
current_control_.i_gain = plant_pole * current_control_.p_gain;
}
关键变量解析
|
变量
|
物理意义
|
单位
|
|
config_.current_control_bandwidth
|
电流环控制带宽(目标闭环带宽)
|
rad/s
|
|
config_.phase_inductance
|
电机相电感(L)
|
H (Henry)
|
|
config_.phase_resistance
|
电机相电阻(R)
|
Ω (Ohm)
|
|
current_control_.p_gain
|
电流环比例增益(Kp)
|
V/A (或等效单位)
|
|
current_control_.i_gain
|
电流环积分增益(Ki)
|
V/(A·s)
|
|
plant_pole
|
电机电气系统极点(-R/L)
|
rad/s
|
03 void Motor::DRV8301_setup()
这段代码是 ODrive 中配置 DRV8301 栅极驱动器(Gate Driver) 的关键部分,主要完成:
- 自动计算电流采样增益:根据硬件参数(如分流电阻阻值)和用户设定的电流范围,选择最优的 DRV8301 内部放大器增益。
- 配置过流保护(OCP):设置硬件过流触发阈值,防止电机或驱动器损坏。
- 初始化 DRV8301 寄存器:通过 SPI 写入配置参数,确保栅极驱动器正常工作。
关键变量/参数
|
变量/参数
|
说明
|
|
hw_config_.shunt_conductance
|
分流电导(= 1 / 分流电阻阻值),单位:S(西门子)
|
|
config_.requested_current_range
|
用户设定的最大电流测量范围(如 ±75A)
|
|
max_output_swing = 1.35V
|
DRV8301 电流采样放大器的最大线性输出范围
|
|
kMargin = 0.90
|
安全裕量,避免放大器饱和
|
|
kTripMargin = 1.0
|
过流触发阈值相对于线性范围的倍数
|
解析都在代码注释中:
// @brief Set up the gate drivers
void Motor::DRV8301_setup() {
// for reference:
// 20V/V on 500uOhm gives a range of +/- 150A
// 40V/V on 500uOhm gives a range of +/- 75A
// 20V/V on 666uOhm gives a range of +/- 110A
// 40V/V on 666uOhm gives a range of +/- 55A
constexpr float kMargin = 0.90f; // 安全裕量,避免放大器饱和.通过合理选择增益和预留裕量,确保电流信号始终处于放大器的线性工作区间
constexpr float kTripMargin = 1.0f; // 过流触发阈值相对于线性范围的倍数
constexpr float max_output_swing = 1.35f; // DRV8301 电流采样放大器的最大线性输出范围
float max_unity_gain_current = kMargin * max_output_swing * hw_config_.shunt_conductance; // [A]
float requested_gain = max_unity_gain_current / config_.requested_current_range; // [V/V]
// DRV8301 支持的增益选项:10V/V、20V/V、40V/V、80V/V。
std::array<std::pair<float, DRV8301_ShuntAmpGain_e>, 4> gain_choices = {
std::make_pair(10.0f, DRV8301_ShuntAmpGain_10VpV),
std::make_pair(20.0f, DRV8301_ShuntAmpGain_20VpV),
std::make_pair(40.0f, DRV8301_ShuntAmpGain_40VpV),
std::make_pair(80.0f, DRV8301_ShuntAmpGain_80VpV)
};
// 反向查找(从大到小),选择 不大于理论值的最小增益(即保证测量范围 ≥ 用户需求)。
auto gain_snap_down = std::lower_bound(gain_choices.crbegin(), gain_choices.crend(), requested_gain,
[](std::pair<float, DRV8301_ShuntAmpGain_e> pair, float val){
return pair.first > val;
});
if(gain_snap_down == gain_choices.crend())
--gain_snap_down;
//电流采样的倒数增益(用于将 ADC 电压值转换为实际电流值)。 例如:若增益=20V/V,则phase_current_rev_gain_ = 1/20 = 0.05。
phase_current_rev_gain_ = 1.0f / gain_snap_down->first;
//电流控制器的最大允许电流(由硬件增益决定)。
current_control_.max_allowed_current = max_unity_gain_current * phase_current_rev_gain_;
// 硬件过流触发阈值(略高于max_allowed_current,防止误触发)。
current_control_.overcurrent_trip_level = (kTripMargin / kMargin) * current_control_.max_allowed_current;
// 配置 DRV8301 寄存器
DRV_SPI_8301_Vars_t* local_regs = &gate_driver_regs_;
DRV8301_enable(&gate_driver_);
DRV8301_setupSpi(&gate_driver_, local_regs);
local_regs->Ctrl_Reg_1.OC_MODE = DRV8301_OcMode_LatchShutDown; //过流保护模式(此处设为锁存关闭,触发后需手动复位)。
// Overcurrent set to approximately 150A at 100degC. This may need tweaking.
local_regs->Ctrl_Reg_1.OC_ADJ_SET = DRV8301_VdsLevel_0p730_V; //过流阈值电压(0.73V 对应 MOSFET Vds 检测电平,约 150A 时触发)。
local_regs->Ctrl_Reg_2.GAIN = gain_snap_down->second; //写入最终选择的放大器增益值。
//通过 SPI 接口将配置写入 DRV8301,并读取回传值确保配置成功。
local_regs->SndCmd = true;
DRV8301_writeData(&gate_driver_, local_regs);
local_regs->RcvCmd = true;
DRV8301_readData(&gate_driver_, local_regs);
}04 bool Motor::check_DRV_fault()
检查 DRV8301 是否触发硬件故障(如过流、过热、欠压等)。
通过
DRV8301_getFaultType() 可获取的具体故障可能包括:
- GVDD_UV:栅极驱动电压欠压
- PVDD_UV:电源电压欠压
- OTSD:过热关断
- OCP:过流保护触发
- FETHA_OC/FETLA_OC:半桥高/低侧 MOSFET 过流
故障处理流程
硬件响应:DRV8301 检测到故障后,会自动关闭 PWM 输出(具体行为由 OC_MODE 配置决定,如锁存关闭或自动恢复)。
软件响应:check_DRV_fault() 检测到故障后,ODrive 会记录错误码(如 axis_->error_ |= Axis::ERROR_DRV_FAULT)。通常需要手动复位或重新初始化 DRV8301 才能恢复运行。
bool Motor::check_DRV_fault() {
//TODO: make this pin configurable per motor ch
GPIO_PinState nFAULT_state = HAL_GPIO_ReadPin(gate_driver_config_.nFAULT_port, gate_driver_config_.nFAULT_pin);
if (nFAULT_state == GPIO_PIN_RESET) {
// Update DRV Fault Code
gate_driver_exported_.drv_fault = (GateDriverIntf::DrvFault)DRV8301_getFaultType(&gate_driver_);
// Update/Cache all SPI device registers
// DRV_SPI_8301_Vars_t* local_regs = &gate_driver_regs_;
// local_regs->RcvCmd = true;
// DRV8301_readData(&gate_driver_, local_regs);
return false;
};
return true;
}05 void Motor::set_error(Motor::Error error)
这段代码是 ODrive 电机控制系统中错误处理的核心函数,用于设置电机错误状态并触发安全保护机制。
- 典型调用场景
- 过流保护触发时
- 温度过高时
- 通信超时或传感器故障时
void Motor::set_error(Motor::Error error){
error_ |= error;
axis_->error_ |= Axis::ERROR_MOTOR_FAILED; //记录错误类型到电机和轴(Axis)的错误寄存器。
safety_critical_disarm_motor_pwm(*this); //立即安全关闭 PWM 输出(disarm)。
update_brake_current(); //更新刹车电流状态(如启用动态制动)。
}

















 3636
3636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









