






 本文介绍树莓派连接pixhawk的两种方法,即USB连接和串口线连接。详细说明了两种连接方式的连线方法、启动命令及相关配置,还提到了串口线连接时需打开树莓派串口功能,遇到权限问题的解决办法。最后作者提出连接后获取不到GPS和时延过高的遗留问题。
本文介绍树莓派连接pixhawk的两种方法,即USB连接和串口线连接。详细说明了两种连接方式的连线方法、启动命令及相关配置,还提到了串口线连接时需打开树莓派串口功能,遇到权限问题的解决办法。最后作者提出连接后获取不到GPS和时延过高的遗留问题。
树莓派连接pixhawk有两种方法
一种是通过USB连接,一种是串口线连接,网上很多都推荐使用串口连接的方式,具体什么原因我还没搞明白,我也是个小白,这篇博文主要用于记录一下使用两种连线分别需要采用的接口设置
一、USB连接
这种方式的连线比较简单,pixhawk侧面有一个插线口,插上后连接树莓派USB口即可。
启动方法:假设你已经看过我的这篇博文安装好mavros了https://blog.youkuaiyun.com/Lin_QC/article/details/88900139
我们进入mavros目录
cd mavros_ws
我们执行 roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:57600
此时可以看到获得了心跳,说明连接成功

同时需要注意的是 上述的指令后半段 fcu_url:=/dev/ttyACM0:57600 是一个可选项,如果不加,会执行px4.launch文件里设置的默认设备口,也就是说我们可以通过编辑px4.launch文件来配置默认启动口。
使用 sudo find / -name px4.launch 可以找到该文件,打开它编辑fcu 可以进行配置
二、串口线连接
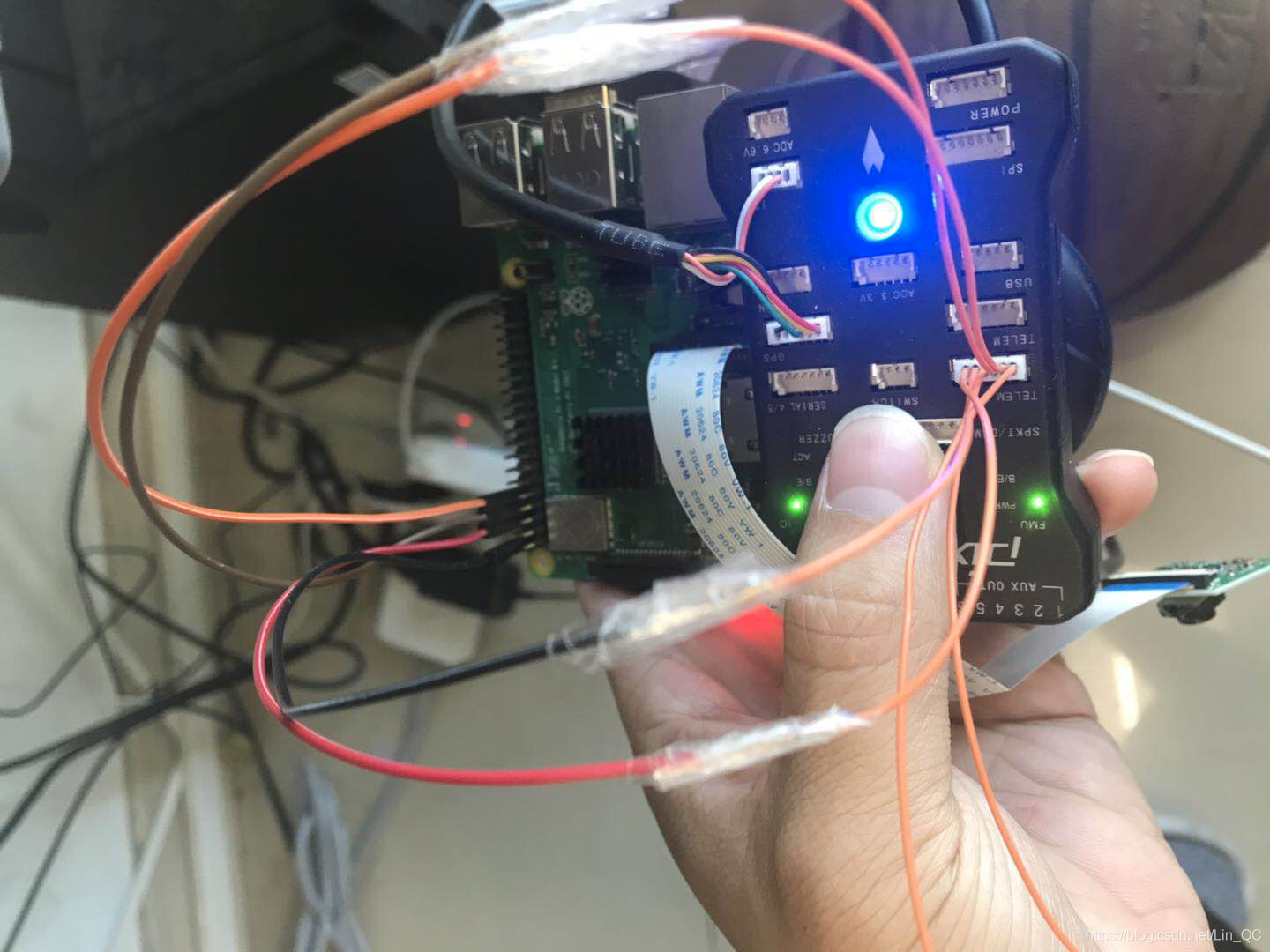
连接如图所示:
连线是一头是杜邦线用于插在树莓派上,一头是端子线用于插在pixhawk上,很多市场可以定制这样的,当然我的是自己缠的,也凑合,只是做个测试

本人手工连线图
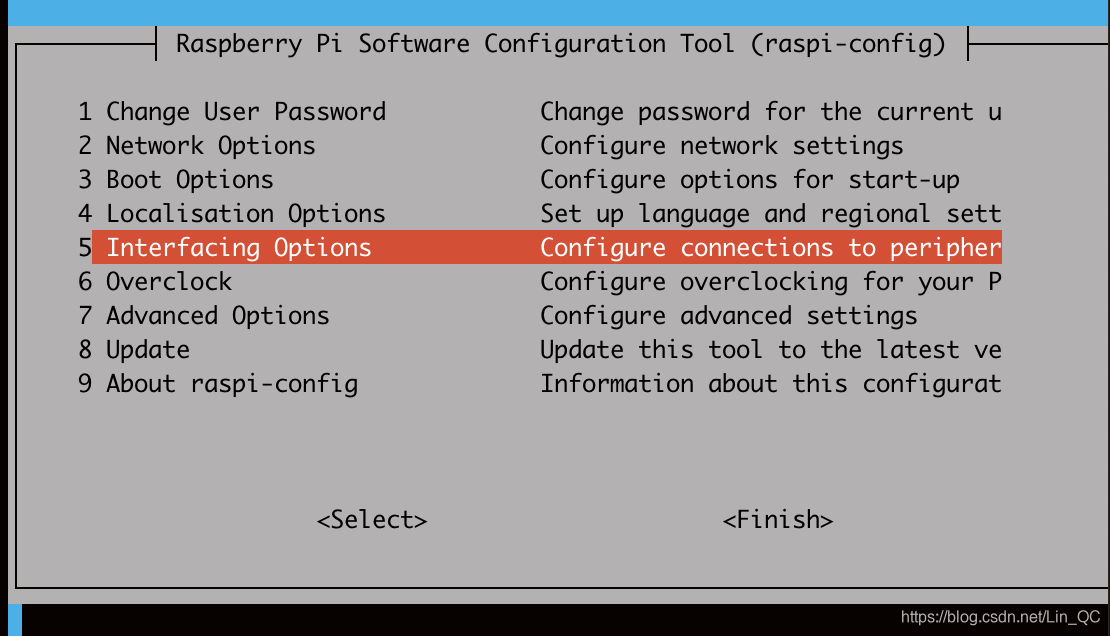
首先,我们需要打开树莓派的serial串口功能,输入 sudo raspi-config
选择interface Options
激活Serial功能
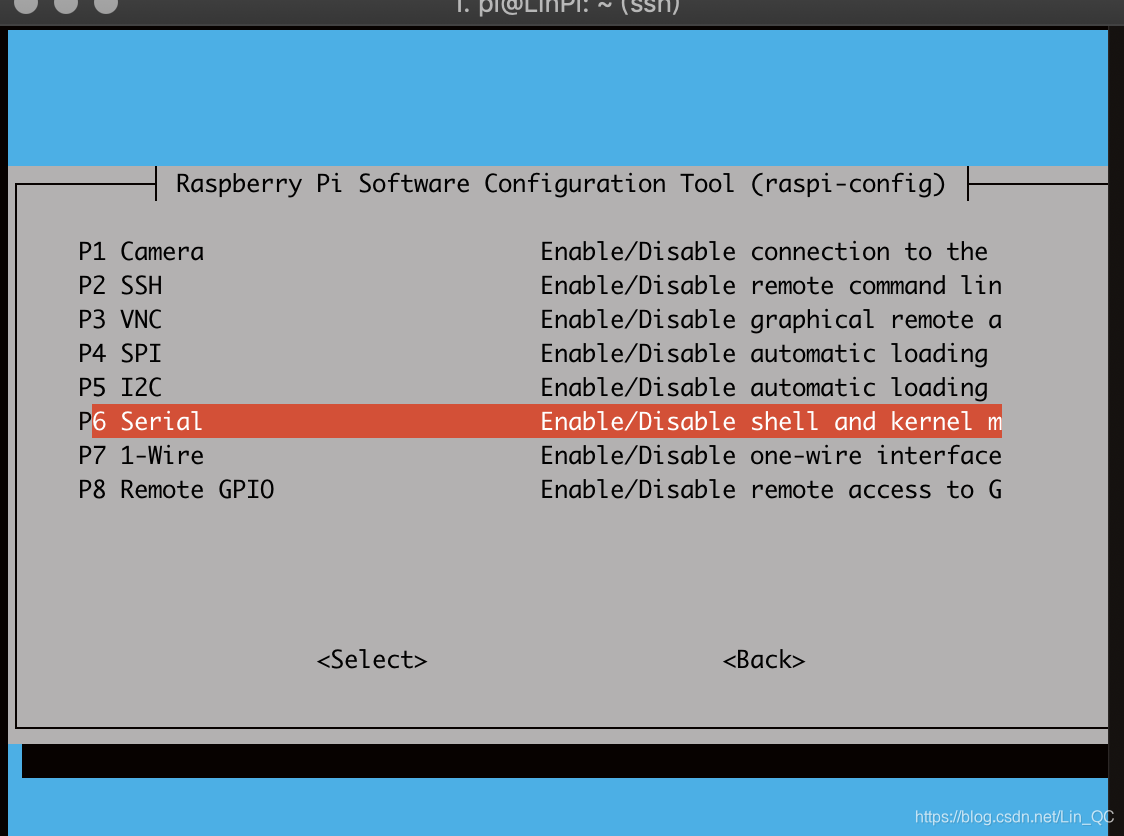
Finish结束
再次进入 mavros_ws
这一次fcu进行了更改
输入的启动命令为
roslaunch mavros px4.launch fcu_url:=/dev/serial0:57600
tips:如果遇到了 报错 DeviceError:serial:open: Permission denied
改变一下串口权限即可
sudo chmod a+rw /dev/serial0
最后,我自己也遗留了两个问题 ,我的飞控上是安装了M8N GPS的,可是连接后一直提示 No GPS fixed ,获取不到home position
![]()
同时,在使用serial0连接时,一直显示时延过高,可是当我调整波特率后,改为官网说的921600,却卡死了
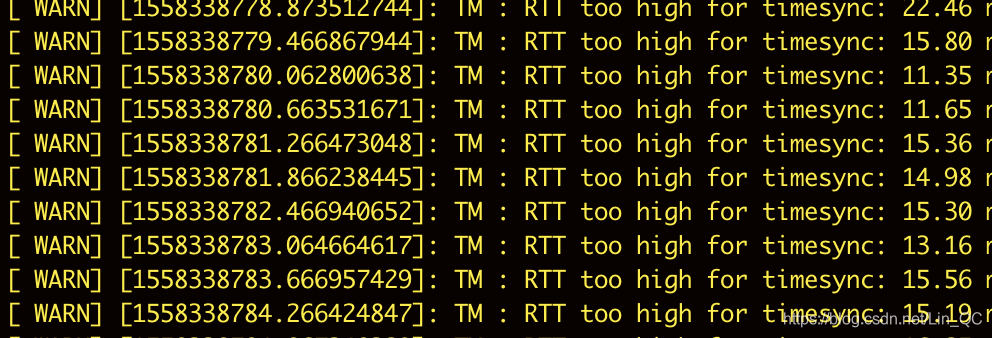
对以上问题有解决的,欢迎交流

















 1万+
1万+






 到【灌水乐园】发言
到【灌水乐园】发言







