




百度 2014 年提出 Deep Speech 模型(语音识别领域的里程碑模型) ,它是端到端语音识别的早期代表性方案
Deep Speech 是首个大规模应用的端到端语音识别模型,与传统 HMM-ASR 方案相比,实现了 “从语音到文本” 的直接映射,大幅简化了流程。
怎么理解端到端
端到端是 “跨任务的通用概念”,AI 任务中 “输入→输出直接映射” 的模型都可以称为端到端
| 任务类型 | 端到端模型示例 | 非端到端的传统方案 |
|---|---|---|
| 图像分类 | AlexNet、ResNet | 人工提取 HOG 特征 + SVM 分类 |
| 语音识别 | Deep Speech、Whisper | HMM+GMM(人工设计音素 + 多模块拼接) |
| 机器翻译 | Transformer(GPT) | 分词→词向量→统计机器翻译(多模块串联) |
| 目标检测 | YOLO、Faster R-CNN | 滑动窗口 + 人工特征提取 + 分类器 |
关键创新(与传统 HMM 方案的差异)
| 维度 | Deep Speech 的设计 | 传统 HMM-ASR 的设计 |
|---|---|---|
| 声学模型 | 端到端训练的深度神经网络(DNN) | HMM+GMM/ANN 混合模型(分模块训练) |
| 语音单元表示 | 完全取消音素级(Phone-level)表示,直接基于文本转录训练 | 依赖音素、音节等中间语音单元 |
| 输入特征 | 直接使用音频的频谱表示(无需 MFCC 等人工设计特征) | 依赖人工 |
| 输出形式 | 字符级(Character-level)转录(直接输出文字字符) | 通常为词级或音素级输出 |
| 训练与解码方式 | 使用 CTC(连接主义时序分类)损失函数和 CTC 解码 | 依赖 Viterbi 解码 + 语言模型后处理 |
Deep Speech 模型的架构模型
架构核心特点
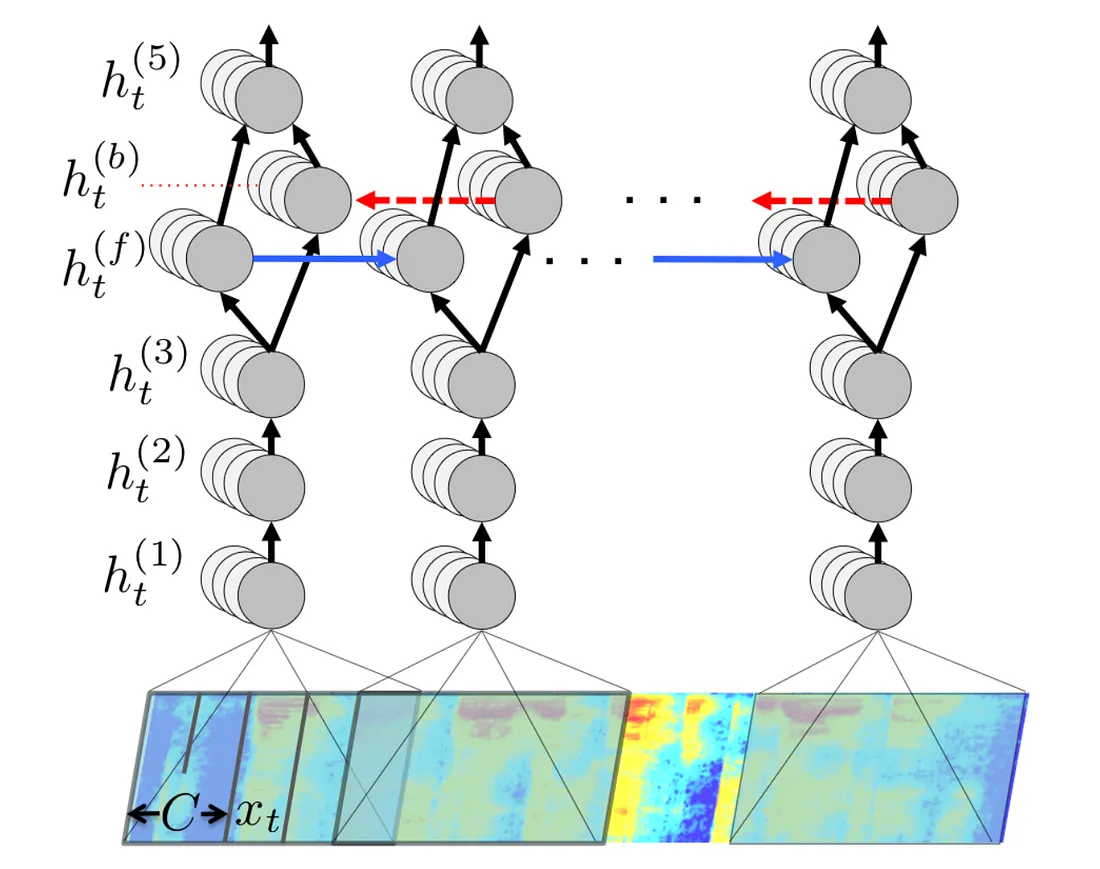
Deep Speech 的网络结构非常简洁,仅包含 5 个隐藏层,关键设计如下:
- 隐藏层组成:仅 1 层是双向循环神经网络(RNN),且并非 LSTM(是基础 RNN 结构),其余为普通深度神经网络层;
- 输入处理:每个时间步的输入是 “滑动窗口内的多帧频谱”(即包含当前帧及前后相邻帧的频谱信息),以此捕捉语音的时序关联性。
以 “训练识别‘cat’” 为例
符号定义
- X={(x(1),y(1)),(x(2),y(2)),...}\mathcal{X} = \{(x^{(1)}, y^{(1)}), (x^{(2)}, y^{(2)}), ...\}X={(x(1),y(1)),(x(2),y(2)),...}:训练数据集,每个样本是
“(输入频谱, 输出字符序列)”对; - x(i)x^{(i)}x(i):第i个样本的输入频谱序列(比如 “cat” 是第 1 个样本,记为(x^{(1)}));
- T(i)T^{(i)}T(i):第i个样本的输入长度(帧数量)(比如 “cat” 样本的T(1)=5T^{(1)} = 5T(1)=5,即 5 帧);
- xt(i)x_t^{(i)}xt(i):第i个样本的第t帧频谱(比如 “cat” 样本的第 2 帧是x2(1)x_2^{(1)}x2(1));
- y(i)y^{(i)}y(i):第i个样本的输出字符序列(比如 “cat” 样本的y(1)=[’c’,’a’,’t’]y^{(1)} = [\text{'c'}, \text{'a'}, \text{'t'}]y(1)=[’c’,’a’,’t’]);
- 注意:这里的y(i)y^{(i)}y(i)是最终字符序列,没有 “逐帧的y1(i)∼yT(i)(i)y_1^{(i)} \sim y_{T^{(i)}}^{(i)}y1(i)∼yT(i)(i)”(端到端模型不需要逐帧标签)。
“cat”(第 1 个样本,i=1i=1i=1)
- 输入:“cat” 的语音 → 切分为 5 帧频谱(记为 x1,x2,x3,x4,x5x_1, x_2, x_3, x_4, x_5x1,x2,x3,x4,x5,每帧是一个特征向量,比如长度为 100 的向量);
- 输出:字符序列y=[’c’,’a’,’t’]y = [\text{'c'}, \text{'a'}, \text{'t'}]y=[’c’,’a’,’t’](最终标签,无逐帧标签);
- x(1)x^{(1)}x(1):“cat” 的输入频谱序列(长度T(1)=5T^{(1)} = 5T(1)=5,即 5 帧);
- xt(1)x_t^{(1)}xt(1):第 1 个样本的第t帧频谱(t=1∼5t=1\sim5t=1∼5,对应x1(1),x2(1),x3(1),x4(1),x5(1)x_1^{(1)}, x_2^{(1)}, x_3^{(1)}, x_4^{(1)}, x_5^{(1)}x1(1),x2(1),x3(1),x4(1),x5(1));
- y(1)y^{(1)}y(1):输出字符序列 “cat”(无逐帧(y_t^{(1)}));
- 滑动窗口参数:C=3C=3C=3(窗口包含 “前 1 帧 + 当前帧 + 后 1 帧”):每个C×xt(1)C×x_t^{(1)}C×xt(1)是 “3 帧拼接的 300 维向量”(100×3)
步骤 1:生成第 1 个样本的C×xtC×x_tC×xt
对第 1 个样本的每帧xt(1)x_t^{(1)}xt(1)(t=1∼5t=1\sim5t=1∼5),生成滑动窗口输入:
- t=1t=1t=1:C×x1(1)=[零向量,x1(1),x2(1)]C \times x_1^{(1)} = [\text{零向量}, x_1^{(1)}, x_2^{(1)}]C×x1(1)=[零向量,x1(1),x2(1)]→ 300 维;
- x1x_1x1无 “前 1 帧”,因此补零(或复制x1x_1x1)
- t=2t=2t=2:C×x2(1)=[x1(1),x2(1),x3(1)]C×x_2^{(1)} = [x_1^{(1)}, x_2^{(1)}, x_3^{(1)}]C×x2(1)=[x1(1),x2(1),x3(1)]→ 300 维
- t=3t=3t=3:C×x3(1)=[x2(1),x3(1),x4(1)]C×x_3^{(1)} = [x_2^{(1)}, x_3^{(1)}, x_4^{(1)}]C×x3(1)=[x2(1),x3(1),x4(1)] → 300 维;
- t=4t=4t=4:C×x4(1)=[x3(1),x4(1),x5(1)]C×x_4^{(1)} = [x_3^{(1)}, x_4^{(1)}, x_5^{(1)}]C×x4(1)=[x3(1),x4(1),x5(1)] → 300 维;
- t=5t=5t=5:C×x5(1)=[x4(1),x5(1),零向量]C×x_5^{(1)} = [x_4^{(1)}, x_5^{(1)}, 零向量]C×x5(1)=[x4(1),x5(1),零向量] → 300 维
- x5x_5x5无 “后 1 帧”,因此补零
步骤 2:模型输入序列
模型的 “初始输入序列” 是:[C×x1(1),C×x2(1),C×x3(1),C×x4(1),C×x5(1)][C \times x_1^{(1)},C×x_2^{(1)},C×x_3^{(1)},C×x_4^{(1)},C×x_5^{(1)}][C×x1(1),C×x2(1),C×x3(1),C×x4(1),C×x5(1)](共 5 个时刻,每个时刻 300 维)
步骤 3:前三层全连接层的处理(特征提炼)
全连接层 1:
- 输入:每个时刻的 300 维向量(比如t=2t=2t=2的 300 维向量);
- 处理:通过权重矩阵(300×128)和偏置,计算后用 ReLU 激活;
- 输出:每个时刻的 128 维特征向量(记为h1(1)(t)h_1^{(1)}(t)h1(1)(t),t=1∼5t=1\sim5t=1∼5)
h1(i)(t)=ReLU(W1×(C×xt(i))+b1)h_1^{(i)}(t) = \text{ReLU}(W_1 \times (C×x_t^{(i)}) + b_1)h1(i)(t)=ReLU(W1×(C×xt(i))+b1)
其中W1W_1W1是 300×128 权重,CCC是滑动窗口大小,b1b_1b1是 128 维偏置
例:t=2t=2t=2的输出 h1(1)(2)=ReLU(W1×(C×x2(1))+b1)h_1^{(1)}(2) = \text{ReLU}(W_1 \times (C×x_2^{(1)}) + b_1)h1(1)(2)=ReLU(W1×(C×x2(1))+b1)。
全连接层 2:
- 输入:全连接层 1 输出的 128 维向量(h1(1)(t)(h_1^{(1)}(t)(h1(1)(t));
- 处理:权重矩阵(128×128)+ ReLU 激活;
- 输出:每个时刻的 128 维特征向量(h2(1)(t)h_2^{(1)}(t)h2(1)(t))。
h2(i)(t)=ReLU(W2×(h1(i)(t)+b2)h_2^{(i)}(t) = \text{ReLU}(W_2 \times (h_1^{(i)}(t) + b_2)h2(i)(t)=ReLU(W2×(h1(i)(t)+b2)
其中W2W_2W2是 [128, 128] 的权重矩阵,b2b_2b2是 128 维偏置。
全连接层 3:
- 输入:全连接层 2 输出的 128 维向量(h2(1)(t)h_2^{(1)}(t)h2(1)(t));
- 处理:权重矩阵(128×128)+ ReLU 激活;
- 输出:每个时刻的 128 维特征向量(h3(1)(t)h_3^{(1)}(t)h3(1)(t))。
h3(i)(t)=ReLU(W3×(h2(i)(t)+b3)h_3^{(i)}(t) = \text{ReLU}(W_3 \times (h_2^{(i)}(t) + b_3)h3(i)(t)=ReLU(W3×(h2(i)(t)+b3)
其中W3W_3W3是 [128, 128] 的权重矩阵,b3b_3b3是 128 维偏置。
经过前三层全连接层后,模型的输入序列被转换为:[h3(1)(1),h3(1)(2),h3(1)(3),h3(1)(4),h3(1)(5)][h_3^{(1)}(1), h_3^{(1)}(2), h_3^{(1)}(3), h_3^{(1)}(4), h_3^{(1)}(5)][h3(1)(1),h3(1)(2),h3(1)(3),h3(1)(4),h3(1)(5)](共 5 个时刻,每个时刻 128 维)。
步骤 4:双向 RNN 层(捕捉时序关联)
双向 RNN 的作用:在前三层全连接层提炼的 “帧级抽象特征” 基础上,同时捕捉 “过去→现在” 和 “未来→现在” 的时序关联—— 比如识别 “a”(第 3 帧)时,既要知道前面是 “c”(第 1-2 帧),也要知道后面是 “t”(第 4-5 帧),才能准确判断这个 “a” 是 “cat” 中的 “a”,而不是 “bat” 或 “car” 中的 “a”。
双向 RNN 由两个独立的单向 RNN组成(前向 RNN + 后向 RNN),共享同一输入序列,但信息流动方向相反:
| 组件 | 信息流动方向 | 核心作用 | 对应 “cat” 的处理逻辑 |
|---|---|---|---|
| 前向 RNN(Forward RNN) | 从左到右(t=1→t=5) | 捕捉 “过去→现在” 的依赖(如 c→a 的衔接) | 先看 h3(1)(1)h_3^{(1)}(1)h3(1)(1)(c 的特征)→ h3(1)(2)h_3^{(1)}(2)h3(1)(2)(c 的特征)→ h3(1)(3)h_3^{(1)}(3)h3(1)(3)(a 的特征)→ …,记住前面的发音序列 |
| 后向 RNN(Backward RNN) | 从右到左(t=5→t=1) | 捕捉 “未来→现在” 的依赖(如 a→t 的衔接) | 先看 h3(1)(5)h_3^{(1)}(5)h3(1)(5)(t 的特征)→ h3(1)(4)h_3^{(1)}(4)h3(1)(4)(t 的特征)→ h3(1)(3)h_3^{(1)}(3)h3(1)(3)(a 的特征)→ …,记住后面的发音序列 |
两个 RNN 的参数(权重、偏置)完全独立,仅输入序列相同。
RNN 层的输入
全连接层 3 输出的特征序列为:
[h3(1)(1),h3(1)(2),h3(1)(3),h3(1)(4),h3(1)(5)][h_3^{(1)}(1), h_3^{(1)}(2), h_3^{(1)}(3), h_3^{(1)}(4), h_3^{(1)}(5)][h3(1)(1),h3(1)(2),h3(1)(3),h3(1)(4),h3(1)(5)]
(5 个时刻,每个时刻 128 维特征向量,对应 “cat” 的 5 帧)
信息流动过程
用hforward(t)h_{forward}(t)hforward(t)表示前向 RNN 在 t 时刻的输出,hbackward(t)h_{backward}(t)hbackward(t)表示后向 RNN 在 t 时刻的输出,均为 128 维
1. 前向 RNN 的逐时刻计算(t=1→t=5)
前向 RNN 的输出依赖「当前时刻输入特征 + 前一时刻的前向输出」,公式为:
hforward(t)=ReLU(Wxf⋅h3(1)(t)+Whf⋅hforward(t−1)+bf)h_{\text{forward}}(t) = \text{ReLU}\left( W_{\text{xf}} \cdot h_3^{(1)}(t) + W_{\text{hf}} \cdot h_{\text{forward}}(t-1) + b_f \right)hforward(t)=ReLU(Wxf⋅h3(1)(t)+Whf⋅hforward(t−1)+bf)
- WxfW_{\text{xf}}Wxf:输入特征到前向 RNN 的权重矩阵(128×128);
- WhfW_{\text{hf}}Whf:前一时刻输出到当前时刻的权重矩阵(128×128);
- bfb_fbf:前向 RNN 的偏置(128 维);
- 初始状态 hforward(0)h_{\text{forward}}(0)hforward(0):全零向量(无过去信息时的默认值)。
具体到 “cat”:
- t=1:输入 h3(1)(1)h_3^{(1)}(1)h3(1)(1)(c 的特征)→ 输出 hforward(1)=ReLU(Wxf⋅h3(1)(1)+Whf⋅0+bf)h_{\text{forward}}(1) = \text{ReLU}(W_{\text{xf}} \cdot h_3^{(1)}(1) + W_{\text{hf}} \cdot 0 + b_f)hforward(1)=ReLU(Wxf⋅h3(1)(1)+Whf⋅0+bf) → 仅包含 c 的特征信息;
- t=2:输入 h3(1)(2)h_3^{(1)}(2)h3(1)(2)(c 的特征)→ 输出 hforward(2)=ReLU(Wxf⋅h3(1)(2)+Whf⋅hforward(1)+bf)h_{\text{forward}}(2) = \text{ReLU}(W_{\text{xf}} \cdot h_3^{(1)}(2) + W_{\text{hf}} \cdot h_{\text{forward}}(1) + b_f)hforward(2)=ReLU(Wxf⋅h3(1)(2)+Whf⋅hforward(1)+bf) → 包含 “c→c” 的连续信息;
- t=3:输入 h3(1)(3)h_3^{(1)}(3)h3(1)(3)(a 的特征)→ 输出hforward(3)=ReLU(Wxf⋅h3(1)(3)+Whf⋅hforward(2)+bf)h_{\text{forward}}(3) = \text{ReLU}(W_{\text{xf}} \cdot h_3^{(1)}(3) + W_{\text{hf}} \cdot h_{\text{forward}}(2) + b_f)hforward(3)=ReLU(Wxf⋅h3(1)(3)+Whf⋅hforward(2)+bf) → 包含 “c→c→a” 的衔接信息;
- t=4:输入 h3(1)(4)h_3^{(1)}(4)h3(1)(4)(t 的特征)→ 输出 hforward(4)h_{\text{forward}}(4)hforward(4) → 包含 “c→c→a→t” 的衔接信息;
- t=5:输入 h3(1)(5)h_3^{(1)}(5)h3(1)(5)(t 的特征)→ 输出 hforward(5)h_{\text{forward}}(5)hforward(5) → 包含完整的 “c→c→a→t→t” 前向序列信息。
2. 后向 RNN 的逐时刻计算(t=5→t=1)
后向 RNN 的输出依赖「当前时刻输入特征 + 后一时刻的后向输出」,公式为:
hbackward(t)=ReLU(Wxb⋅h3(1)(t)+Whb⋅hbackward(t+1)+bb)h_{\text{backward}}(t) = \text{ReLU}\left( W_{\text{xb}} \cdot h_3^{(1)}(t) + W_{\text{hb}} \cdot h_{\text{backward}}(t+1) + b_b \right)hbackward(t)=ReLU(Wxb⋅h3(1)(t)+Whb⋅hbackward(t+1)+bb)
- WxbW_{\text{xb}}Wxb:输入特征到后向 RNN 的权重矩阵(128×128);
- WhbW_{\text{hb}}Whb:后一时刻输出到当前时刻的权重矩阵(128×128);
- bbb_bbb:后向 RNN 的偏置(128 维);
- 初始状态 hbackward(6)h_{\text{backward}}(6)hbackward(6):全零向量(无未来信息时的默认值)。
具体到 “cat”:
-
t=5:输入 h3(1)(5)h_3^{(1)}(5)h3(1)(5)(t 的特征)→ 输出 hbackward(5)=ReLU(Wxb⋅h3(1)(5)+Whb⋅0+bb)h_{\text{backward}}(5) = \text{ReLU}(W_{\text{xb}} \cdot h_3^{(1)}(5) + W_{\text{hb}} \cdot 0 + b_b)hbackward(5)=ReLU(Wxb⋅h3(1)(5)+Whb⋅0+bb) → 仅包含 t 的特征信息;
-
t=4:输入 h3(1)(4)h_3^{(1)}(4)h3(1)(4)(t 的特征)→ 输出 hbackward(4)=ReLU(Wxb⋅h3(1)(4)+Whb⋅hbackward(5)+bb)h_{\text{backward}}(4) = \text{ReLU}(W_{\text{xb}} \cdot h_3^{(1)}(4) + W_{\text{hb}} \cdot h_{\text{backward}}(5) + b_b)hbackward(4)=ReLU(Wxb⋅h3(1)(4)+Whb⋅hbackward(5)+bb) → 包含 “t→t” 的连续信息;
-
t=3:输入 h3(1)(3)h_3^{(1)}(3)h3(1)(3)(a 的特征)→ 输出 hbackward(3)=ReLU(Wxb⋅h3(1)(3)+Whb⋅hbackward(4)+bb)h_{\text{backward}}(3) = \text{ReLU}(W_{\text{xb}} \cdot h_3^{(1)}(3) + W_{\text{hb}} \cdot h_{\text{backward}}(4) + b_b)hbackward(3)=ReLU(Wxb⋅h3(1)(3)+Whb⋅hbackward(4)+bb) → 包含 “a→t→t” 的衔接信息;
-
t=2:输入 h3(1)(2)h_3^{(1)}(2)h3(1)(2)(c 的特征)→ 输出 hbackward(2)h_{\text{backward}}(2)hbackward(2) → 包含 “c→a→t→t” 的衔接信息;
-
t=1:输入 h3(1)(1)h_3^{(1)}(1)h3(1)(1)(c 的特征)→ 输出 hbackward(1)h_{\text{backward}}(1)hbackward(1) → 包含完整的 “c→c→a→t→t” 后向序列信息。
3. 双向 RNN 的最终输出(拼接前向 + 后向)
每个时刻 t 的双向 RNN 输出,是「前向输出 + 后向输出」的向量拼接,维度从 128 维→256 维:hbiRNN(t)=concat(hforward(t),hbackward(t))h_{\text{biRNN}}(t) = \text{concat}\left( h_{\text{forward}}(t), h_{\text{backward}}(t) \right)hbiRNN(t)=concat(hforward(t),hbackward(t))
对应 “cat” 的关键时刻 t=3(a 的特征帧):
- hbiRNN(3)=concat(hforward(3),hbackward(3))h_{\text{biRNN}}(3) = \text{concat}(h_{\text{forward}}(3), h_{\text{backward}}(3))hbiRNN(3)=concat(hforward(3),hbackward(3)) → 256 维向量;
- 其中:hforward(3)h_{\text{forward}}(3)hforward(3) 包含 “c→c→a” 的前向信息,hbackward(3)h_{\text{backward}}(3)hbackward(3) 包含 “a→t→t” 的后向信息;
- 最终,t=3 的输出同时包含 “a 前面是什么” 和 “a 后面是什么”,让模型明确这是 “cat” 中的 “a”
双向 RNN 的核心作用(为什么必须用双向?)
- 解决语音的 “上下文依赖” 问题:语音是连续的,单个帧的特征没有明确含义,必须结合前后发音才能判断。比如单独看 h3 (3)(a 的特征),无法确定是 “cat”“bat” 还是 “car”,但结合前向的 “c” 和后向的 “t”,就能唯一确定是 “cat” 中的 “a”。
- 提升字符预测的准确性:前文输出层的字符概率分布(如 t=3 预测 “a” 的概率 0.95),依赖双向 RNN 的 256 维特征 —— 因为这个特征包含了完整的上下文,模型能更自信地判断当前帧对应的字符。
- 替代传统 HMM 的时序建模:传统 HMM 需要单独建模音素的转移概率(如 c→a 的转移概率),而双向 RNN 通过学习特征序列的时序关联,直接在模型内部实现了 “时序建模”,这也是端到端模型能跳过 HMM 的关键原因之一。
步骤 5:输出层(全连接层 4)→ 字符概率分布
输出层的作用:把 RNN 的 256 维特征向量,映射为 “所有字符的概率分布”:
-
假设字符集大小为 30(26 字母 + 空格 + 撇号 + 空字符);
-
输入:双向RNN 输出的 256 维向量(hbiRNN(1)(t)h_{biRNN}^{(1)}(t)hbiRNN(1)(t));
-
处理:权重矩阵(256×30)+ Softmax 激活(把输出转换为概率,总和为 1);
-
输出:每个时刻的 30 维字符概率分布 p(ct(1)∣x(1))p(c_t^{(1)} | x^{(1)})p(ct(1)∣x(1))。
- ct(1)c_t^{(1)}ct(1)是第t时刻预测的字符
- 上标(1)(1)(1):代表第 1 个样本(即 “cat” 样本)
- x(1)x^{(1)}x(1):第 1 个样本的输入频谱序列;
- 整体含义:“在第 1 个样本的输入x(1)x^{(1)}x(1)下,第t时刻预测为字符ct(1)c_t^{(1)}ct(1)的概率”
全连接层 4 的映射分为线性变换和非线性激活两步:
步骤 1:线性变换(计算 Softmax 的输入z(t))
线性变换的公式为:
z(t)=Wo⋅hbiRNN(t)+boz(t) = W_o \cdot h_{biRNN}(t) + b_oz(t)=Wo⋅hbiRNN(t)+bo
符号解释:
- z(t):第t时刻的 30 维字符得分向量(Softmax 的输入向量,未归一化的 “对数概率” 或 “得分”);
- WoW_oWo:权重矩阵(30×256),每一行对应一个字符的权重;
- hbiRNN(t)h_{biRNN}(t)hbiRNN(t):第t时刻的RNN 输出(256×1 列向量);
- bob_obo:偏置向量(30×1 列向量),每一行对应一个字符的偏置;
逐元素展开(第k个字符的得分):
zk(t)=∑i=1256Wo,k,i⋅hbiRNN,i(t)+bo,kz_k(t) = \sum_{i=1}^{256} W_{o,k,i} \cdot h_{biRNN,i}(t) + b_{o,k}zk(t)=∑i=1256Wo,k,i⋅hbiRNN,i(t)+bo,k
Wo,k,iW_{o,k,i}Wo,k,i是权重矩阵第k行第i列的元素,hbiRNN,i(t)h_{biRNN,i}(t)hbiRNN,i(t)是 RNN 输出第i个元素,bo,kb_{o,k}bo,k是偏置第k个元素)
步骤 2:Softmax 激活(转换为概率分布yhat(t)y_{hat}(t)yhat(t))
Softmax 激活的作用是将 30 维字符得分转换为 30 维概率分布(总和为 1),公式为:
yhat,k(t)=exp(zk(t))∑j=130exp(zj(t))y_{\text{hat,k}}(t) = \frac{\exp(z_{\text{k}}(t))}{\sum_{j=1}^{30} \exp(z_{\text{j}}(t))}yhat,k(t)=∑j=130exp(zj(t))exp(zk(t))
符号解释:
- yhat,k(t)y_{\text{hat},k}(t)yhat,k(t):第t时刻第k个字符的概率(30 维分布的第k个元素);
- exp():指数函数(将得分转换为正数);
- 分母:所有字符得分的指数和(归一化因子,保证概率和为 1)。
对 “cat” 的 5 个时刻30 维概率分布(重点关注’c’、‘a’、‘t’、'ε’的概率)
| 时刻t | 字符 0(‘a’) | 字符 2(‘c’) | 字符 19(‘t’) | 字符 28(‘ε’) | 其他字符(26 个) | 30 维概率和 |
|---|---|---|---|---|---|---|
| 1 | 0.01 | 0.92 | 0.01 | 0.05 | 0.01(26 个字符均分,每个≈0.0004) | 1.00 |
| 2 | 0.02 | 0.88 | 0.01 | 0.07 | 0.02(每个≈0.0008) | 1.00 |
| 3 | 0.95 | 0.01 | 0.01 | 0.02 | 0.01(每个≈0.0004) | 1.00 |
| 4 | 0.01 | 0.01 | 0.90 | 0.06 | 0.02(每个≈0.0008) | 1.00 |
| 5 | 0.01 | 0.01 | 0.85 | 0.10 | 0.03(每个≈0.0012) | 1.00 |
t=3 时刻的 30 维概率分布向量y_hat(3)可明确写为:yhat(3)=[0.95,0.0004,0.01,0.0004,...,0.01,0.0004,...,0.02,0.0004]y_{hat}(3) = [ 0.95, 0.0004, 0.01, 0.0004, ..., 0.01, 0.0004, ..., 0.02, 0.0004 ]yhat(3)=[0.95,0.0004,0.01,0.0004,...,0.01,0.0004,...,0.02,0.0004]
对应:
[索引0('a'), 索引1(其他字符), 索引2('c'), 索引3(其他字符), 索引4-18(其他字符,各个 ≈0.0004), 索引19('t'), 索引20(其他字符), 索引21-27(其他字符,各≈0.0004), 索引28('ε'), 索引29(其他字符)]
(所有元素求和 = 1.00)
步骤 6:CTC 损失计算
CTC 损失的核心目标
CTC(连接主义时序分类)损失的作用是:在 “输入帧数量≠输出字符数量” 且 “无逐帧标签” 的情况下,计算 “模型预测的帧级字符序列” 与 “真实字符序列” 的匹配误差,让模型学会 “从多帧预测中提炼出正确的字符序列”。
以 “cat” 样本为例的 CTC 损失计算步骤
已知条件:
- 模型输入:“cat” 的 5 帧特征序列(对应 5 个时刻的预测);
- 模型输出:5 个时刻的字符概率分布(预测序列:c→c→a→t→t);
- 真实标签:字符序列y=[’c’,’a’,’t’]y = [\text{'c'}, \text{'a'}, \text{'t'}]y=[’c’,’a’,’t’](长度 3)。
步骤 1:构造 “扩展标签序列”(处理长度不匹配)
CTC 会在真实标签中插入空字符(记为ε),构造 “扩展标签序列”,使其长度≥输入帧数量的一半(保证能对齐)。
- 真实标签:[c, a, t] (
U=3) - 扩展标签序列:[ε, c, ε, a, ε, t, ε](长度为
2U+1=7≥5/2)
扩展标签的生成规则
扩展标签(记为y’)是对真实标签y 的改造,目的是为了让 “长度为T的帧序列” 能通过 “插入空字符、重复字符” 与 “长度为U的真实字符序列” 对齐。生成规则只有 2 条:
- 规则 1:在真实标签的每个字符之间插入 “空字符ε”;
- 规则 2:在真实标签的开头和结尾也插入 “空字符ε”。
步骤 2:寻找 “有效对齐路径”(预测序列→标签序列的合法映射)
有效对齐路径是指:预测序列(5 帧)通过 “合并重复字符、跳过空字符” 后,能得到真实标签[c,a,t]的所有可能字符序列。
以 “cat” 的预测序列c→c→a→t→t为例,有效对齐路径是:
- 路径 1:
c(t1)→ c(t2)→ a(t3)→ t(t4)→ t(t5) - 路径 2:
c(t1)→ ε(t2)→ a(t3)→ t(t4)→ t(t5)(若 t2 预测为空字符) - …(所有满足 “合并后为 c-a-t” 的序列)
前向 - 后向算法
前向 - 后向算法是动态规划在 CTC 时序对齐问题中的具体应用 —— 通过 “状态转移” 和 “递推计算”,避免枚举所有有效路径(指数级复杂度),以 O(T×U²) 复杂度高效求出所有有效路径的概率之和(T 是输入帧数量,U 是真实标签长度)。
在 CTC 中:
- 「大问题」:计算所有有效路径的概率之和(比如 5 帧对应 3 个字符,有效路径可能有上百条,枚举会爆炸);
- 「小问题」:计算 “前 t 帧匹配到扩展标签第 s 位” 的概率(即前向变量αt(s)α_t(s)αt(s));
- 「中间结果」:存储每个t和s对应的αt(s)α_t(s)αt(s),后续计算直接复用,无需重复计算历史路径。
结合 “cat” 的扩展标签 y’ = [ε, c, ε, a, ε, t, ε](长度 7,记为s=1~7)和 5 帧(t=1~5),解释递推逻辑:
1. 定义 “状态”:前向变量αt(s)α_t(s)αt(s):
状态定义是动态规划的灵魂,CTC 中定义:
αt(s)=前t帧匹配到扩展标签第s位的所有有效路径的概率之和\alpha_t(s) = 前t帧匹配到扩展标签第s位的所有有效路径的概率之和αt(s)=前t帧匹配到扩展标签第s位的所有有效路径的概率之和
- 比如 α3(4)α_3(4)α3(4):前 3 帧匹配到扩展标签第 4 位(字符
a)的所有有效路径的概率和; - 状态的维度是 T×(2U+1)(T=5,2U+1=7),共 35 个状态(远少于枚举的路径数)。
5 个时刻的 30 维概率分布(核心字符):
| t | yhat,t(ε)y_{\text{hat},t}(ε)yhat,t(ε) | yhat,t(c)y_{\text{hat},t}(c)yhat,t(c) | yhat,t(a)y_{\text{hat},t}(a)yhat,t(a) | yhat,t(t)y_{\text{hat},t}(t)yhat,t(t) |
|---|---|---|---|---|
| 1 | 0.05 | 0.92 | 0.01 | 0.01 |
| 2 | 0.07 | 0.88 | 0.02 | 0.01 |
| 3 | 0.02 | 0.01 | 0.95 | 0.01 |
| 4 | 0.06 | 0.01 | 0.01 | 0.90 |
| 5 | 0.10 | 0.01 | 0.01 | 0.85 |
yhat,t(ε)y_{\text{hat},t}(ε)yhat,t(ε)是30 维向量yhat(t)y_{\text{hat}}(t)yhat(t)中第 28 位的元素值(t=3 时刻为 0.02)
2. 定义 “状态转移”:从t-1帧到t帧的概率传递
对于第t帧的状态s(扩展标签第s位字符y'[s]),其概率αt(s)α_t(s)αt(s)只能来自第t-1帧的有限几个相邻状态(避免枚举所有路径),转移规则由 CTC 合并逻辑推导而来:
- 转移来源 1:前一帧也在s位(对应 “重复字符”,比如t-1帧和t帧都匹配c);
- 转移来源 2:前一帧在s-1位(对应 “正常推进”,比如t-1帧匹配ε,t帧匹配c);
- 转移来源 3:前一帧在s-2位(对应 “跳过空字符”,比如t-1帧匹配c,t帧直接匹配a,跳过中间的ε)。
转移公式:
αt(s)={t=1(初始状态):α1(1)=yhat,1(y′[1]), α1(2)=yhat,1(y′[2]), 其余=0t≥2, s=1:αt−1(1)×yhat,t(y′[1])t≥2, s≥2:(αt−1(s)+αt−1(s−1)+(若y′[s]≠ε 且 y′[s]≠y′[s−2],则加αt−1(s−2)))×yhat,t(y′[s])\alpha_t(s) = \begin{cases} \text{t=1(}初始状态\text{):} & \alpha_1(1)=y_{\text{hat},1}(y'[1]),\ \alpha_1(2)=y_{\text{hat},1}(y'[2]),\ \text{其余}=0 \\ t\geq2,\ s=1\text{:} & \alpha_{t-1}(1) \times y_{\text{hat},t}(y'[1]) \\ t\geq2,\ s\geq2\text{:} & \left( \alpha_{t-1}(s) + \alpha_{t-1}(s-1) + \text{(若}y'[s]\neqε\ \text{且}\ y'[s]\neq y'[s-2]\text{,则加}\alpha_{t-1}(s-2)\text{)} \right) \times y_{\text{hat},t}(y'[s]) \end{cases}αt(s)=⎩⎨⎧t=1(初始状态):t≥2, s=1:t≥2, s≥2:α1(1)=yhat,1(y′[1]), α1(2)=yhat,1(y′[2]), 其余=0αt−1(1)×yhat,t(y′[1])(αt−1(s)+αt−1(s−1)+(若y′[s]=ε 且 y′[s]=y′[s−2],则加αt−1(s−2)))×yhat,t(y′[s])
(约束:空字符(ε)不能跳过自身,连续相同字符只能从相邻状态转移)
最后乘以 yhat,t(y′[s])y_{hat,t}(y'[s])yhat,t(y′[s]):第t帧预测扩展标签第s位字符的概率(从 30 维分布中取值)。
3. 递推计算
t=1帧的初始状态(只有s=1[ε]和s=2[c] 有概率,其余为 0):
- s=1s=1s=1:α1(1)=yhat,1(ε)=0.05\alpha_1(1) = y_{\text{hat},1}(ε) = 0.05α1(1)=yhat,1(ε)=0.05
- s=2s=2s=2:α1(2)=yhat,1(c)=0.92\alpha_1(2) = y_{\text{hat},1}(c) = 0.92α1(2)=yhat,1(c)=0.92
- s=3∼7s=3\sim7s=3∼7:α1(s)=0\alpha_1(s) = 0α1(s)=0(第 1 帧无法匹配后面的标签)
t=2
-
s=1s=1s=1(字符εεε):
只能从t=1t=1t=1的s=1s=1s=1转移(εεε不能跳过自身)
α2(1)=α1(1)×yhat,2(ε)=0.05×0.07=0.0035\alpha_2(1) = \alpha_1(1) \times y_{\text{hat},2}(ε) = 0.05 \times 0.07 = 0.0035α2(1)=α1(1)×yhat,2(ε)=0.05×0.07=0.0035 -
s=2s=2s=2(字符c):c≠εc\neqεc=ε且c≠y′[0]c\neq y'[0]c=y′[0](s−2=0s-2=0s−2=0不存在),故只加α1(2)+α1(1)\alpha_{1}(2)+\alpha_{1}(1)α1(2)+α1(1):
α2(2)=(α1(2)+α1(1))×yhat,2(c)=(0.92+0.05)×0.88=0.8536\alpha_2(2) = \left( \alpha_1(2) + \alpha_1(1) \right) \times y_{\text{hat},2}(c) = (0.92+0.05) \times 0.88 = 0.8536α2(2)=(α1(2)+α1(1))×yhat,2(c)=(0.92+0.05)×0.88=0.8536 -
s=3s=3s=3(字符εεε):只能从t=1t=1t=1的s=2s=2s=2转移(εεε不能跳过自身):α2(3)=α1(2)×yhat,2(ε)=0.92×0.07=0.0644\alpha_2(3) = \alpha_1(2) \times y_{\text{hat},2}(ε) = 0.92 \times 0.07 = 0.0644α2(3)=α1(2)×yhat,2(ε)=0.92×0.07=0.0644
-
s=4∼7s=4\sim7s=4∼7:α2(s)=0\alpha_2(s)=0α2(s)=0(第 2 帧无法匹配后面的标签)
t=3
-
s=1(字符εεε):
从t=2的s=1转移:
α3(1)=α2(1)×yhat,3(ε)=0.0035×0.02=0.00007\alpha_3(1) = \alpha_2(1) \times y_{\text{hat},3}(ε) = 0.0035 \times 0.02 = 0.00007α3(1)=α2(1)×yhat,3(ε)=0.0035×0.02=0.00007 -
s=2(字符c):
α3(2)=(α2(2)+α2(1))×yhat,3(c)=(0.8536+0.0035)×0.01≈0.00857\alpha_3(2) = \left( \alpha_2(2) + \alpha_2(1) \right) \times y_{\text{hat},3}(c) = (0.8536+0.0035) \times 0.01 ≈ 0.00857α3(2)=(α2(2)+α2(1))×yhat,3(c)=(0.8536+0.0035)×0.01≈0.00857 -
s=3(字符(ε)):
α3(3)=(α2(3)+α2(2))×yhat,3(ε)=(0.0644+0.8536)×0.02=0.01836\alpha_3(3) = \left( \alpha_2(3) + \alpha_2(2) \right) \times y_{\text{hat},3}(ε) = (0.0644+0.8536) \times 0.02 = 0.01836α3(3)=(α2(3)+α2(2))×yhat,3(ε)=(0.0644+0.8536)×0.02=0.01836 -
s=4(字符a):
α3(4)=(α2(4)+α2(3)+α2(2))×yhat,3(a)=(0+0.0644+0.8536)×0.95=0.8671\alpha_3(4) = \left( \alpha_2(4) + \alpha_2(3) + \alpha_2(2) \right) \times y_{\text{hat},3}(a) = (0+0.0644+0.8536) \times 0.95 = 0.8671α3(4)=(α2(4)+α2(3)+α2(2))×yhat,3(a)=(0+0.0644+0.8536)×0.95=0.8671 -
s=5∼7s=5\sim7s=5∼7:α3(s)=0\alpha_3(s)=0α3(s)=0
t=4
- s=1(字符εεε):α4(1)=α3(1)×yhat,4(ε)=0.00007×0.06≈0.000004\alpha_4(1) = \alpha_3(1) \times y_{\text{hat},4}(ε) = 0.00007 \times 0.06 ≈ 0.000004α4(1)=α3(1)×yhat,4(ε)=0.00007×0.06≈0.000004
- s=2(字符ccc):α4(2)=(α3(2)+α3(1))×yhat,4(c)=(0.00857+0.00007)×0.01≈0.000086\alpha_4(2) = \left( \alpha_3(2) + \alpha_3(1) \right) \times y_{\text{hat},4}(c) = (0.00857+0.00007) \times 0.01 ≈ 0.000086α4(2)=(α3(2)+α3(1))×yhat,4(c)=(0.00857+0.00007)×0.01≈0.000086
- s=3(字符εεε):α4(3)=(α3(3)+α3(2))×yhat,4(ε)=(0.01836+0.00857)×0.06≈0.001616\alpha_4(3) = \left( \alpha_3(3) + \alpha_3(2) \right) \times y_{\text{hat},4}(ε) = (0.01836+0.00857) \times 0.06 ≈ 0.001616α4(3)=(α3(3)+α3(2))×yhat,4(ε)=(0.01836+0.00857)×0.06≈0.001616
- s=4(字符aaa):α4(4)=(α3(4)+α3(3)+α3(2))×yhat,4(a)=(0.8671+0.01836+0.00857)×0.01≈0.00894\alpha_4(4) = \left( \alpha_3(4) + \alpha_3(3) + \alpha_3(2) \right) \times y_{\text{hat},4}(a) = (0.8671+0.01836+0.00857) \times 0.01 ≈ 0.00894α4(4)=(α3(4)+α3(3)+α3(2))×yhat,4(a)=(0.8671+0.01836+0.00857)×0.01≈0.00894
- s=5(字符εεε)):$\alpha_4(5) = \left( \alpha_3(5) + \alpha_3(4) \right) \times y_{\text{hat},4}(ε) = (0+0.8671) \times 0.06 = 0.052026
- s=6:α4(6)=(α3(6)+α3(5)+α3(4))×yhat,4(t)=(0+0+0.8671)×0.90=0.78039\alpha_4(6) = \left( \alpha_3(6) + \alpha_3(5) + \alpha_3(4) \right) \times y_{\text{hat},4}(t) = (0+0+0.8671) \times 0.90 = 0.78039α4(6)=(α3(6)+α3(5)+α3(4))×yhat,4(t)=(0+0+0.8671)×0.90=0.78039
- s=7:α4(7)=0\alpha_4(7)=0α4(7)=0
t=5
- s=1(字符εεε):α5(1)=α4(1)×yhat,5(ε)=0.000004×0.10≈0.0000004\alpha_5(1) = \alpha_4(1) \times y_{\text{hat},5}(ε) = 0.000004 \times 0.10 ≈ 0.0000004α5(1)=α4(1)×yhat,5(ε)=0.000004×0.10≈0.0000004
- s=2
- s=3
- s=4
- s=5
- s=7
通过这种方式,每帧只需要计算 7 个状态(扩展标签长度),每个状态最多依赖 3 个前序状态,高效递推。
步骤 3:计算总概率P(y|x)
总概率是最后一帧匹配扩展标签最后两位(ttt或εεε)的概率之和:
- 对任意真实标签
y(长度U),扩展标签的长度是2U+12U+12U+1,总概率的计算规则是:P(y∣x)=αT(2U)+αT(2U+1)P(y|x) = \alpha_T(2U) + \alpha_T(2U+1)P(y∣x)=αT(2U)+αT(2U+1)- TTT:输入帧的数量(比如 “cat” 的(T=5));
- 2U2U2U:扩展标签的倒数第二位(对应真实标签的最后一个字符);
- 2U+12U+12U+1:扩展标签的最后一位(对应结尾的空字符εεε)。
总概率验证P(y∣x)=α5(6)+α5(7)≈0.7167+0.07804≈0.7947P(y|x) = \alpha_5(6) + \alpha_5(7) ≈ 0.7167 + 0.07804 ≈ 0.7947P(y∣x)=α5(6)+α5(7)≈0.7167+0.07804≈0.7947
通过完整递推可以看到:前向变量αt(s)\alpha_t(s)αt(s)通过 “状态转移 + 约束”,自动覆盖了所有有效路径的概率,无需枚举,且只保留对总概率有贡献的状态。
步骤 4:计算 CTC 损失
CTC 损失是 “总概率的负对数”(负对数能将 “概率最大化” 转化为 “损失最小化”,符合梯度下降的优化逻辑):
CTCLoss=−log(P(y∣x))=−log(0.7947)≈0.23CTC_\text{Loss} = -\log(P(y|x)) = -\log(0.7947) ≈ 0.23CTCLoss=−log(P(y∣x))=−log(0.7947)≈0.23
这个损失值(≈0.230)表示:
- 模型当前的匹配度:模型的 5 帧预测序列与真实标签cat的匹配置信度约为 79.47%(总概率),损失越小说明匹配度越高;
- 模型需要优化的方向:损失 > 0,说明模型还有优化空间(比如让 t=3 帧a的概率更集中、t=4 帧t的概率更高)。
步骤7:模型更新过程(反向传播)
得到 CTC 损失后,通过反向传播算法调整模型所有参数(前三层全连接层、双向 RNN、输出层的权重和偏置)
CTC 损失的梯度需要反向传播到输出层→双向 RNN→前三层全连接层,核心是计算 “损失对输出层概率y_hat_t©的梯度”,再逐层传递。
步骤 1:计算损失对输出层的梯度输出层的输出是 “每个时刻的字符概率分布”,损失对输出层第t时刻字符c的梯度为:
∂Loss∂p(c∣t)=−1P(y∣x)×该字符在有效路径中的总贡献概率\frac{\partial \text{Loss}}{\partial p(c|t)} = -\frac{1}{P(y|x)} × \text{该字符在有效路径中的总贡献概率}∂p(c∣t)∂Loss=−P(y∣x)1×该字符在有效路径中的总贡献概率
步骤 2:梯度从输出层向 RNN 层反向传播输出层的梯度会传递到双向 RNN 层,计算损失对 RNN 输出的梯度,再进一步分解为 “前向 RNN” 和 “后向 RNN” 的梯度,调整 RNN 的权重Wxf、Whf、Wxb、WhbW_{\text{xf}}、W_{\text{hf}}、W_{\text{xb}}、W_{\text{hb}}Wxf、Whf、Wxb、Whb等参数。
步骤 3:梯度向全连接层反向传播RNN 层的梯度继续传递到前三层全连接层,计算损失对全连接层权重(W1、W2、W3W_1、W_2、W_3W1、W2、W3)和偏置(b1、b2、b3b_1、b_2、b_3b1、b2、b3)的梯度。
步骤 4:梯度下降更新参数用梯度下降法(如 SGD、Adam)调整所有参数:θnew=θold−α×∂Loss∂θold\theta_{\text{new}} = \theta_{\text{old}} - \alpha × \frac{\partial \text{Loss}}{\partial \theta_{\text{old}}}θnew=θold−α×∂θold∂Loss
其中α\alphaα是学习率(控制参数更新的步长)。

















 1856
1856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









