




前言
本篇文章介绍的是ROS高效进阶内容,使用URDF 语言(xml格式)做一个差速轮式机器人模型,并使用URDF的增强版xacro,对机器人模型文件进行二次优化。
差速轮式机器人:两轮差速底盘由两个动力轮位于底盘左右两侧,两轮独立控制速度,通过给定不同速度实现底盘转向控制。一般会配有一到两个辅助支撑的万向轮。
此次建模,不引入算法,只是把机器人模型的样子做出来,所以只使用 rivz 进行可视化显示。
机器人的定义和构成
- 机器人定义:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高级灵活性的自动化机器。目前,自动驾驶汽车也被认为是一种机器人。
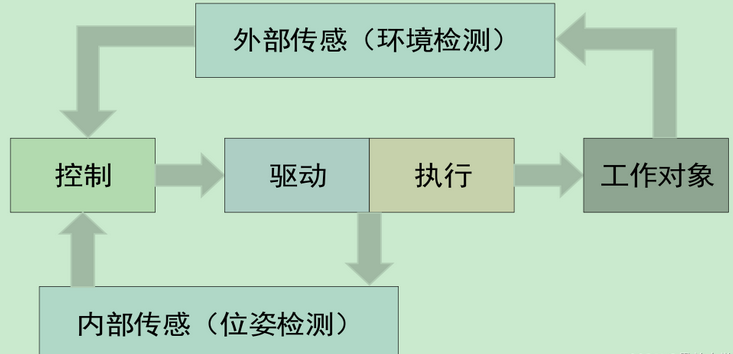
- 机器人构成:机器人通常分为四大部分,即执行机构,驱动系统,传感系统和控制系统。以自动驾驶汽车为例,执行机构就是油门,转向和刹车;驱动系统就是电动机;传感系统就是各种传感器:lidar,radar,camera,uss,imu,GNSS;控制系统就是智驾算法系统:感知,定位,规划和控制。
- 机器人四大部分的控制回路,大致如图:
URDF建模套路
- URDF:Unified Robot Description Format,统一的机器人描述文件格式。urdf 文件使用 xml 格式。
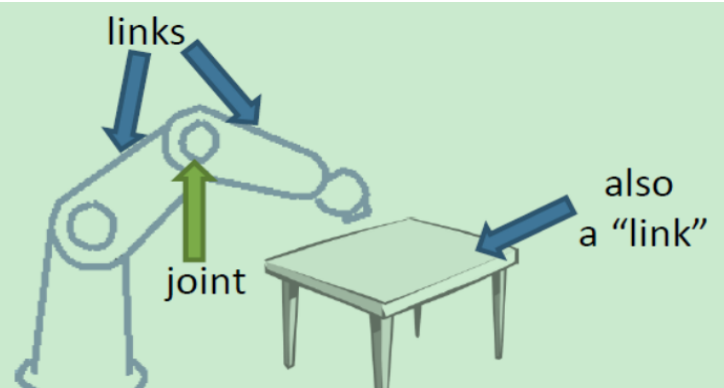
- 用 urdf 描述机器人,套路如下:每个机器人都是由多个 link(连杆) 和 joint(关节)组成。这里的 link 和joint 很宽泛,形状不一定是杆和轴。比如桌子,桌面和腿都是link,连接处是固定的 joint。
- link:描述机器人某个刚体部分的外观和物理属性。外观包括:尺寸,颜色,形状。物理属性包括:惯性矩阵(inertial matrix)和碰撞参数(collision properties)。在机器人建模中,每个link 都是一个坐标系。下面是差速轮式机器人底盘的建模,底盘一般称为 base。
这里我们只进行外观建模,因此暂不涉及物理属性配置。
- joint:描述两个 link 之间的关系,包括运动学和动力学属性,这里暂时只关注运动学属性。通常情况下,两个 link 的关系一般分为六种:
continuous:旋转关节,可以围绕单轴360度无限旋转,比如轮子的轴
revolute:旋转关节,但是有旋转角度的范围限制,比如钟摆
prismatic:滑动关节,也叫活塞关节,沿某一轴线移动的关节,有位置限制,强调一维,比如打气筒
planar:平面关节,允许在平面正交方向上平移或旋转,强调平面,比如抽屉内外滑动
floating:浮动关节,允许进行平移和旋转运动,比如人体的肩关节
fixed:固定关节,比如桌子腿和桌面
下面是差速轮式机器人主动轮与底盘的 joint 样例:
使用URDF做一个差速轮式机器人模型
- 创建 mbot_description 软件包及相关文件
- mbot_base.urdf :这是整个mbot建模的文件,包括底盘,两个动力伦,两个万向轮,一个camera,一个kinect(深度相机),一个lidar。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1042
1042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









