




 本文介绍了自动驾驶行为规划的重要性和挑战,包括行为预测和行为规划两个关键部分。行为预测涉及预测其他道路使用者的未来行为,而行为规划则基于预测结果决定自动驾驶车辆的驾驶行为。文章探讨了基于规则、机器学习和深度学习的行为预测方法,以及在行为规划中使用强化学习、博弈论等技术,特别是强调了蒙特卡洛树搜索在行为规划中的应用。
本文介绍了自动驾驶行为规划的重要性和挑战,包括行为预测和行为规划两个关键部分。行为预测涉及预测其他道路使用者的未来行为,而行为规划则基于预测结果决定自动驾驶车辆的驾驶行为。文章探讨了基于规则、机器学习和深度学习的行为预测方法,以及在行为规划中使用强化学习、博弈论等技术,特别是强调了蒙特卡洛树搜索在行为规划中的应用。
1 背景
写Behavior Planning这一篇,是目前为止认为最难写的一篇,同时个人认为也是量产领域最难的一环,因为涉及到太多的知识,笔者的能力虽然有限,有错误或者不足的地方欢迎各位读者指证,但尽最大努力把它较为完整的呈现给读者,后续如果有不完善的地方,笔者会继续增加篇幅去介绍。
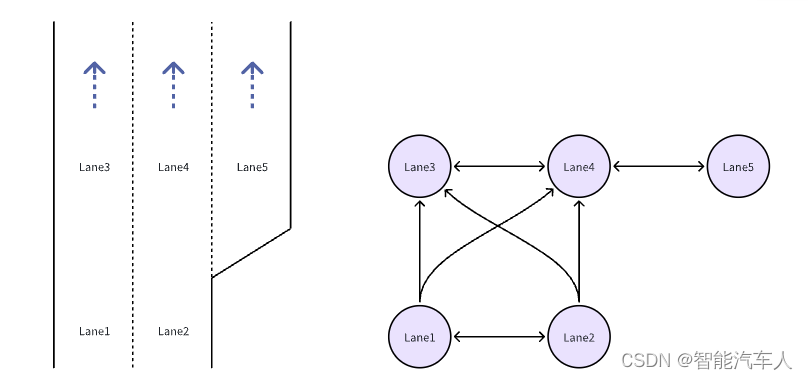
这里再简单回顾一下,在前面的文章中《自动驾驶---Planning之Routing模块-优快云博客》已经介绍过,Routing最终会提供多个局部route的结果(比如下图中从lane1--->lane5,有多个选择),最终自动驾驶车辆决定使用哪一条route就需要独立的模块去决策,这就是Behavior Planning模块的职责。
2 Behavior Planning介绍
首先,看看文章里的定义。自动驾驶的行为规划(Behavior Planning)是自动驾驶系统中的关键组成部分之一,主要涉及车辆对周围

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1748
1748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











