




 本文详细介绍了激光雷达点云数据的处理流程,包括坐标转换、地面检测和平面拟合,以及点云的KD树聚类和DBSCAN聚类算法。通过这些方法,可以有效地分割和识别点云中的地面和障碍物,为自动驾驶提供关键信息。
本文详细介绍了激光雷达点云数据的处理流程,包括坐标转换、地面检测和平面拟合,以及点云的KD树聚类和DBSCAN聚类算法。通过这些方法,可以有效地分割和识别点云中的地面和障碍物,为自动驾驶提供关键信息。
1.realsense点云坐标转换
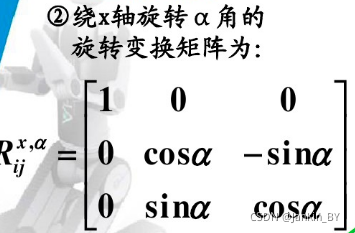
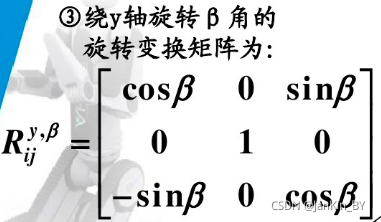
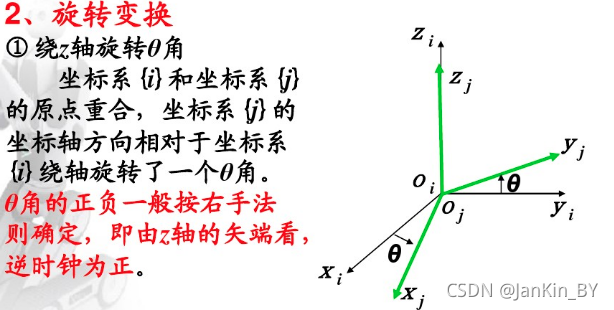
1.1、绕轴旋转矩阵
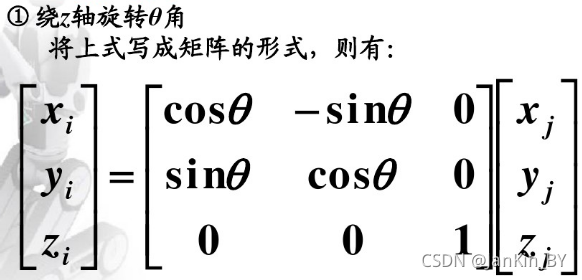
1.2、角度正负判断:
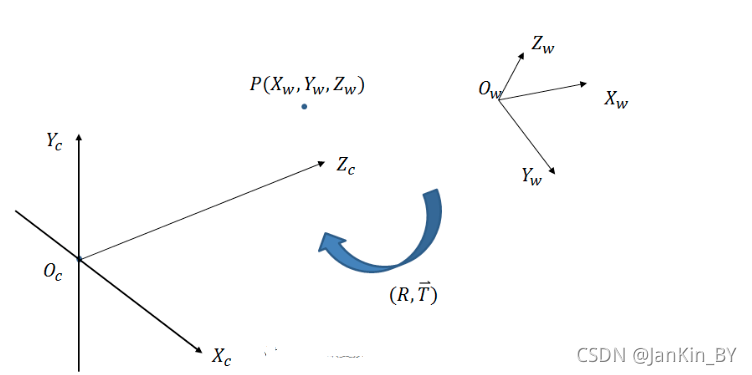
1.3、左乘右乘判断:
动坐标系和静坐标系
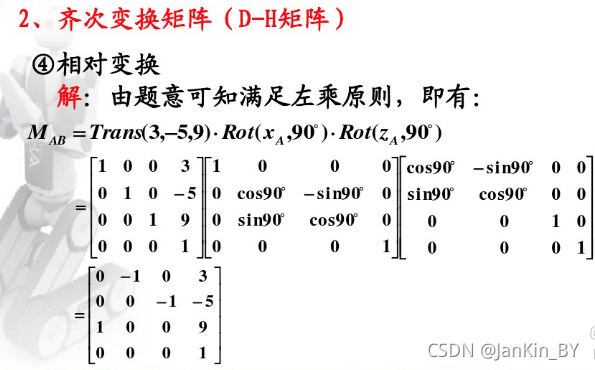
例子:静坐标系,选择左乘
realsense 采集的深度点云,转换为世界坐标系
浅析相机相关坐标系的相互转换(世界坐标系、相机坐标系、图像坐标系、像素坐标系、内参矩阵、外参矩阵、扭转因子)【相机标定&计算机视觉】_土豪gold的博客-优快云博客
三维视觉基础之世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系_jiangxing11的博客-优快云博客
从世界坐标系到相机坐标系,旋转顺序任意
- 常规欧拉角 (Z-X-Z, X-Y-X, Y-Z-Y, Z-Y-Z, X-Z-X, Y-X-Y)
,之后再平移的过程。
三维空间坐标系变换-旋转矩阵_fireflychh的博客-优快云博客_坐标变换矩阵
绕世界坐标系的Z轴顺时针旋转90度,在将旋转后的坐标系绕其x轴旋转90度,坐标系变换需右乘,逆正顺负。
则:R(Z,-90)×R(X,-90)
=(0 1 0;-1 0 0;0 0 1)×(1 0 0;0 0 1;0 -1 0)=(0 0 1 ;-1 0 0;0 -1 0)
Xw=Zc;Yw=-Xc;Zw=-Yc
进行滤波处理,选取一定高度和深度。
/**************************************************************************************
Function: coordinate transformation
Description: This function in order to transform coordinate
Calls: none
Called By: PlaneGroundFilter::point_cb()
Input:
Point cloud of "/camera/depth/color/points"
Output:
Point cloud of target coordinate system
Return:
pcl::PointCloud<VPoint> point cloud
Others:
***************************************************************************************/
pcl::PointCloud<VPoint> PlaneGroundFilter::coordinate_transformation(const sensor_msgs::PointCloud2ConstPtr &incloud_ptr)
{
// Container for original & filtered data
pcl::PCLPointCloud2* cloud = new pcl::PCLPointCloud2;
pcl::PCLPointCloud2ConstPtr cloudPtr(cloud);
pcl::PCLPointCloud2 cloud_filtered; //滤波后数据储存
// Convert to PCL data type
pcl_conversions::toPCL(*incloud_ptr, *cloud);
// Perform the actual filtering
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;//滤波
sor.setInputCloud (cloudPtr);
sor.setLeafSize (0.1f, 0.1f, 0.1f);//0.01 1cm
sor.filter (cloud_filtered);
pcl::PointCloud<VPoint> laserCloudIn_trans;
pcl::fromPCLPointCloud2(cloud_filtered,laserCloudIn_trans);
pcl::PointCloud<VPoint> P_TransOut=laserCloudIn_trans;
// For mark ground points and hold all points
SLRPointXYZIRL point;
for (size_t i = 0; i < laserCloudIn_trans.points.size(); i++)
{
if(laserCloudIn_trans[i].z<6.0&&laserCloudIn_trans[i].y<2.0){
P_TransOut.points[i].x=laserCloudIn_trans[i].z;
point.x = laserCloudIn_trans[i].z;
P_TransOut.points[i].y=-laserCloudIn_trans[i].x;
point.y = -laserCloudIn_trans[i].x;
P_TransOut.points[i].z=-laserCloudIn_trans[i].y;
point.z = -laserCloudIn_trans[i].y;
point.label = 0u; // 0 means uncluster
g_all_pc->points.push_back(point);}
}
return P_TransOut;
}2.地面检测算法
点云平面检测GitHub - muratkendir/PlaneDetectionwPCL: Uses some filters and running RANSAC algorithm to detect planes in any kind of point cloud data, finally saves as seperate point clouds
点云平面检测GitHub - muratkendir/PlaneDetectionwPCL: Uses some filters and running RANSAC algorithm to detect planes in any kind of point cloud data, finally saves as seperate point cloudspcl点云平面提取检测RANSAC_肥鼠路易的博客-优快云博客_ransac平面检测
点云平面检测GitHub - muratkendir
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1286
1286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









