




前期准备:使用创芯科技CAN分析仪,大陆ARS-408XX毫米波雷达,电源:12DC/24DC
一、安装USBCAN-Ⅱ驱动
1.打开设备管理器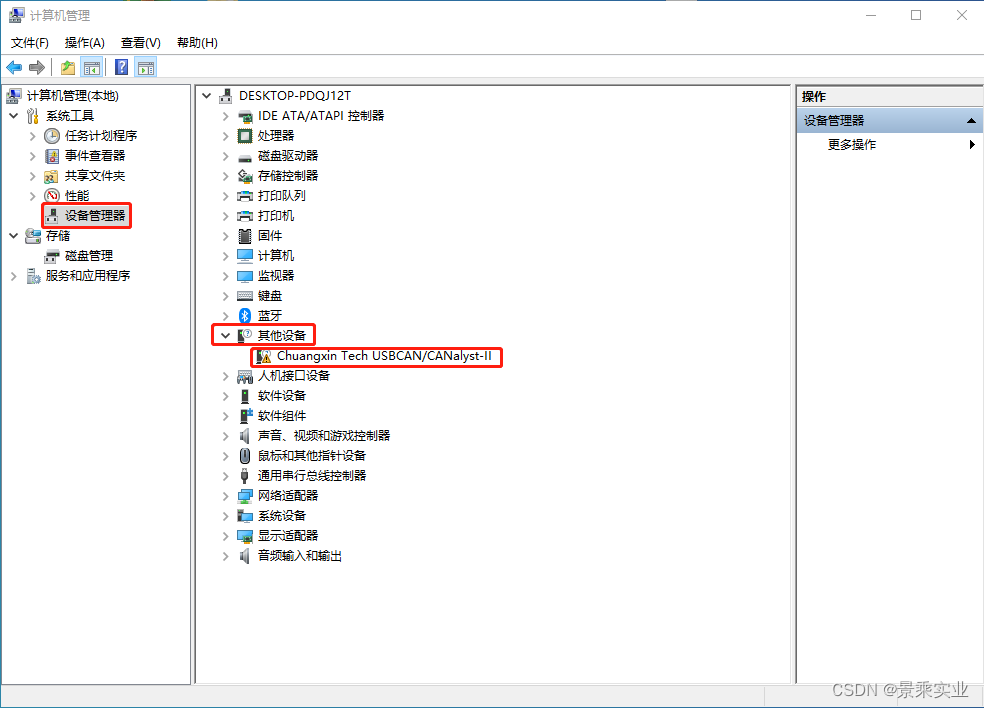
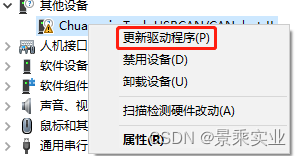
2.鼠标右键→更新驱动
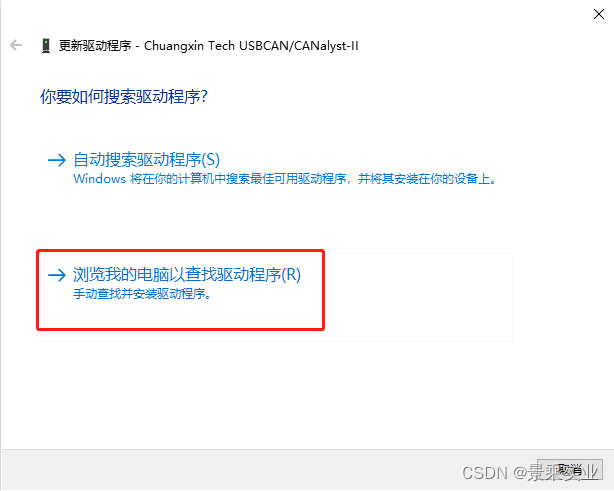
3.手动查找
4.找到自己的文件中文件驱动位置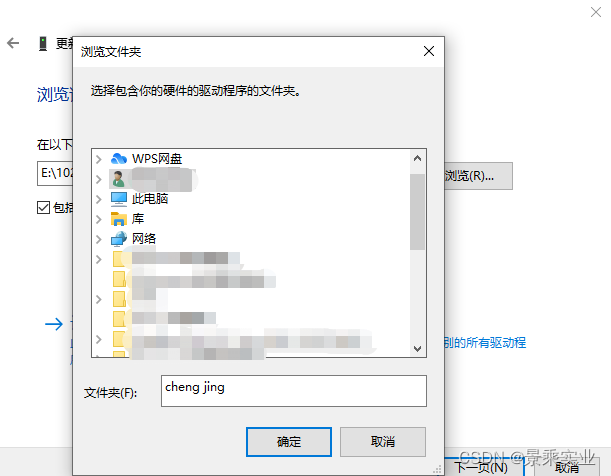
找到自己文件位置

(根据自己的电脑找到自己的驱动)
5.安装好驱动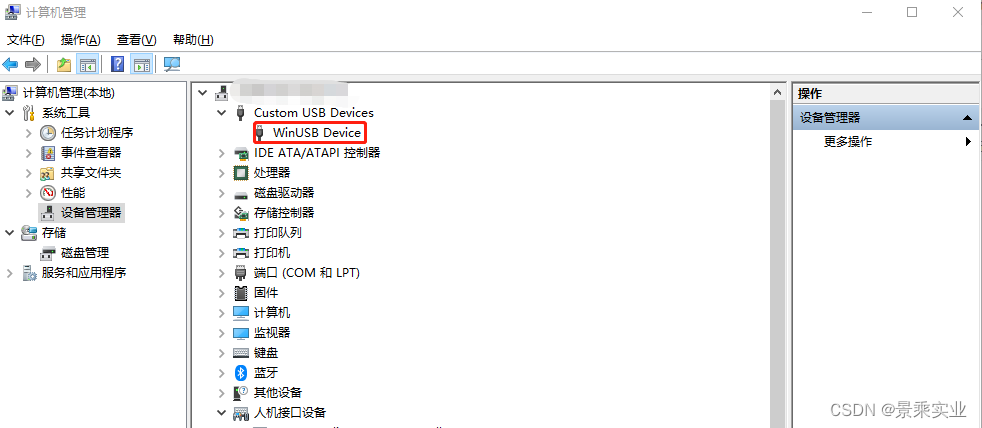
二、软件使用

直接打开ARS_408无需安装
1.打开软件连接雷达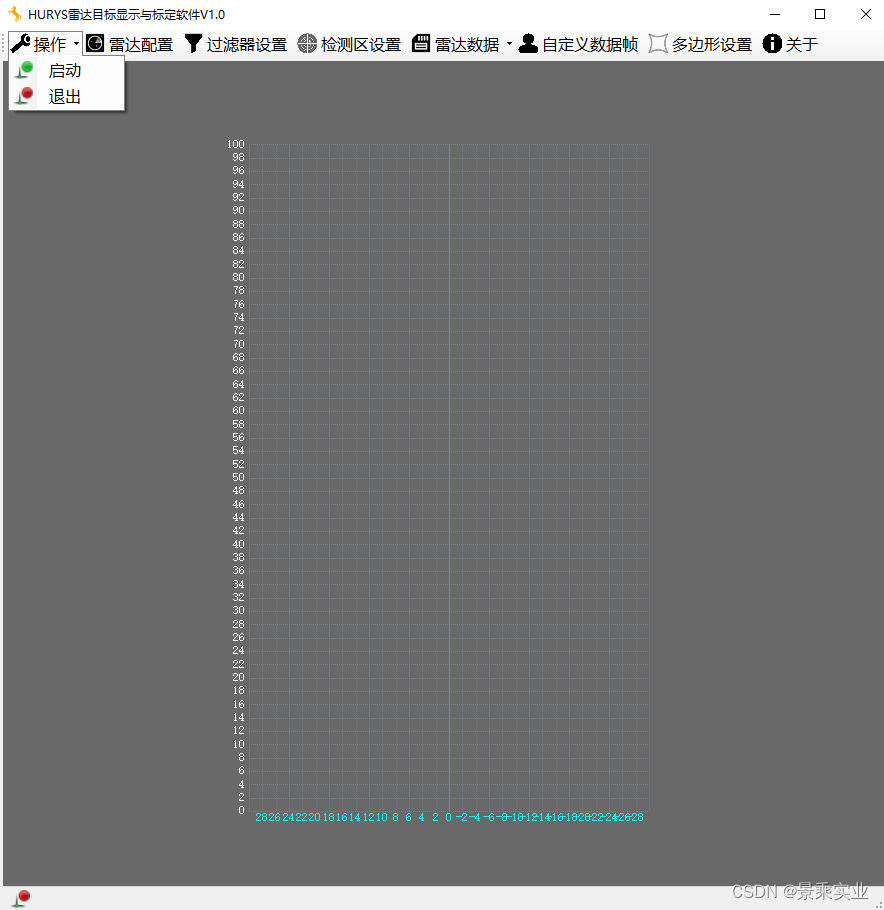
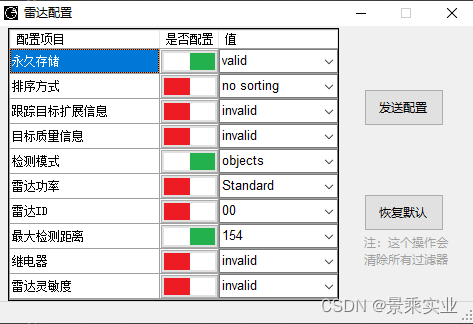
2.雷达配置
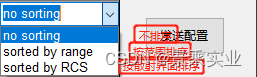
排列方式:
跟踪目标扩展信息:
 本文介绍了如何安装USBCAN-Ⅱ驱动以连接和配置大陆ARS-408XX毫米波雷达。通过设备管理器手动更新驱动,并详细讲解了雷达的软件使用步骤,包括雷达配置、过滤器设置、检测区设置、雷达数据、自定义数据帧以及多边形设置。特别指出,多边形设置功能仅在ARS408-21SC3型号雷达中可用。
本文介绍了如何安装USBCAN-Ⅱ驱动以连接和配置大陆ARS-408XX毫米波雷达。通过设备管理器手动更新驱动,并详细讲解了雷达的软件使用步骤,包括雷达配置、过滤器设置、检测区设置、雷达数据、自定义数据帧以及多边形设置。特别指出,多边形设置功能仅在ARS408-21SC3型号雷达中可用。
前期准备:使用创芯科技CAN分析仪,大陆ARS-408XX毫米波雷达,电源:12DC/24DC
(根据自己的电脑找到自己的驱动)
直接打开ARS_408无需安装
排列方式:
跟踪目标扩展信息:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+





