



上海交通大学人工智能学院 (SAI) 谢伟迪课题组招 Computer Vision,AI4Science 方向科研实习,表现优异同学可获直硕/直博 offer。
✦
✦
课题组简介
✦
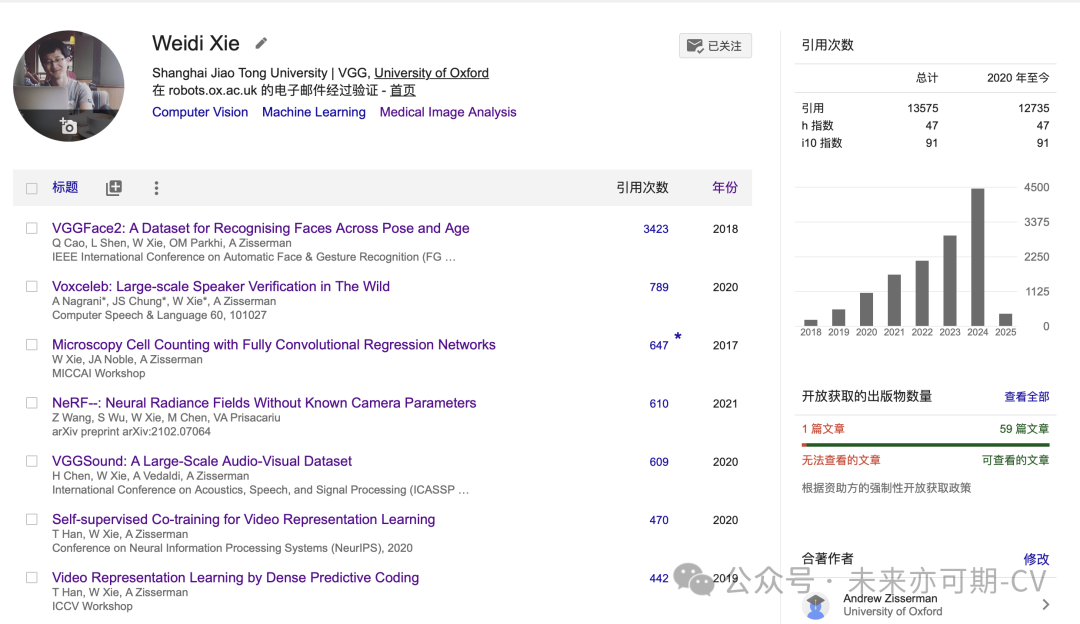
MultiModal Perception Group 是上海交通大学人工智能学院的科研团队,负责人为谢伟迪副教授,于 2018 年在牛津大学视觉几何组 (VGG) 获得博士学位,导师是 Andrew Zisserman 教授和 Alison Noble 教授。研究方向涵盖 Computer Vision 和 AI4Science,更多团队的研究成果可参见:http://weidixie.github.io,或过往公众号论文解读。
✦
✦
招生要求
✦
科研兴趣方向:AI4Healthcare, Bioinformatics, AIGC, Multimodal Video Understanding,AI4Sports;
本科专业背景:人工智能、计算机科学、生命科学等相关专业;
强自我驱动力:能够应对压力和竞争,追求极致的完美;
学术素养:能突破已有学术研究格局,拒绝低质量 paper 发表,宁缺毋滥。
✦
✦
课题组资源
✦
计算资源充足:实验室有丰富的计算资源,鼓励创新与跨学科合作;
团队氛围融洽:团队成员之间相互支持,学长学姐们热情且乐于分享经验,导师提供细致的科研指导
国际合作交流:有机会与全球顶尖研究机构和实验室开展合作,甚至获得赴海外访问学者的机会,拓宽视野,提升学术影响力。
✦
✦
联系方式
✦
请将您的简历、在校成绩单以及相关项目经验或研究成果发送至:weidi@sjtu.edu.cn。邮件标题请注明“科研实习申请-姓名”。如果实验室对你提交的内容感兴趣,我们将尽快与您联系并安排面试。
✦
✦
更多信息
✦
Schorlar: https://scholar.google.com/citations?hl=zh-CN&user=Vtrqj4gAAAAJ
Twitter: https://x.com/WeidiXie
Bilibili: https://space.bilibili.com/626918756?spm_id_from=333.337.0.0
Github: https://github.com/MAGIC-AI4Med
加入我们!
一起探索人工智能研究中的无限可能!

















 4540
4540

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









