



研究背景
在当今快速发展的科研领域,科研人员常遇复杂多变的实验需求,传统机器人方案因固定的编程接口和有限的传感器反馈,难以满足科研对灵活性、精确性、实时性的高要求,且难以快速适应多样科研项目中的原型设计和定制化需求。
正是在这样的背景下,专为Franka Robotics研究机器人设计的底层控制功能开源C++库应运而生,为Franka机械臂赋予了全新的生命力。它以C++作为主要编程语言,打破了传统限制,为科研人员提供了灵活、强大且易于定制的解决方案,使他们能够更高效地应对科研过程中的各种挑战。
C++库(libfranka)概述
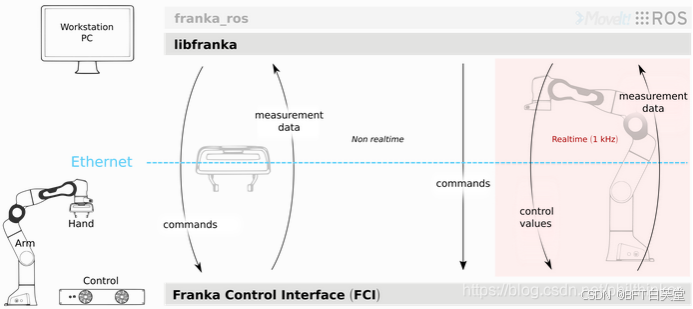
libfranka是一个基于C++的工具包,专为开发Franka机器人应用而设计。它支持实时控制,便于用户构建复杂的运动规划与控制算法。尽管Franka机器人的控制频率高达1kHz,但用户代码的执行时间却严格限制为300微秒内,因此需避免代码冗长及过多外部读写操作。
安装C++库(libfranka)需准备
Franka Panda机器人:确保已购买科研包(推荐使用Franka Research 3)
PC工作站:配备以太网口。
网线:一根。
操作系统:Ubuntu 16.04(64位)Linux系统。
安装步骤
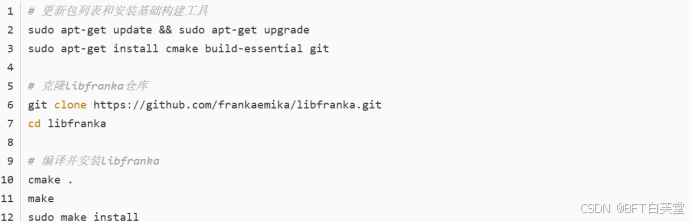
首先,请确认系统满足基本的网络和系统配置要求。随后,在Linux系统上安装libfranka,可遵循官方文档的步骤,通常涵盖安装所需依赖、下载源码及进行编译的过程:
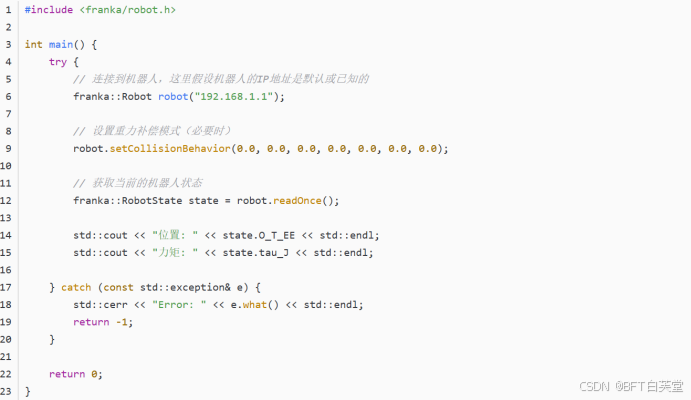
快速启动示例程序,演示如何建立机器人连接并获取其当前状态。
技术突破与价值
C++库(libfranka)核心功能
精确运动控制:为机器人研究提供低级别的精准操控能力。
实时数据通信:确保与机器人进行即时、高效的互动。
扩展功能支持:丰富的API接口,支持更多定制化和高级功能开发。
相比传统方案,C++库(libfranka)在四个维度实现跨越:
精度控制:ibfranka提供低级别控制接口,使机器人运动控制精度达到亚毫米级。
商业场景扩展:适用于具身智能、实验室自动化、医疗辅助等多种商业场景
高度可扩展性:丰富的API接口支持自定义控制算法和高级功能开发,满足多样化研究需求。
实时反馈:支持1kHz的实时数据反馈,包括传感器读数、关节位置等
C++ (libfranka)详情链接: https://gitcode.com/gh mirrors/li/libfranka
为什么选择BFT?
- 我们为Franka用户打造全周期服务生态:
- 采购无忧 - 提供设备融资租赁方案(首付低至30%)
- 开发支持 - 200+即插即用算法库实时调用
- 售后保障 - 7×24小时专家响应团队
- 生态对接 - 接入500+合作企业的场景方案库
立即行动,开启智能未来!
BFT机器人一站式采购平台,将为您提供便捷的购买体验和专业的服务支持。访问我们的网站:(https://www.bft-robot.com/index/index.html 和 https://hk.bftrobot.com/ ),了解更多产品信息并完成采购!让科技为行业赋能,让我们一同为智能化的未来增光添彩!

















 1177
1177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









