




原创 | 文 BFT机器人

机器人要在迷宫中找到出路并非易事,试想我们让机器人穿越一个孩子的游戏室,散落在地板上的各种玩具和各类家具挡住了一些潜在的路径。这个混乱的”迷宫“要求机器人在不与任何障碍物相撞的情况下计算到达目的地的最优路径,机器人该怎么做呢?
01
GCS算法提升机器人复杂环境下的行动能力
麻省理工学院(MIT)计算机科学与人工智能实验室(CSAIL)的研究人员提出的“凸集图(GCS)轨迹优化”算法提供了一种可扩展的、无碰运动规划系统,以满足这些机器人导航需求。
该方法将图搜索(一种在网络中查找离散路径的方法)与凸优化(一种优化连续变量的高效方法,以使给定成本最小化)相结合,可以快速找到穿越类似迷宫环境的路径,同时优化机器人的轨迹。GCS可以在多达14个维度(可能更多)中绘制无碰撞轨迹,旨在改善机器在仓库、图书馆和家庭等环境中的协同工作。
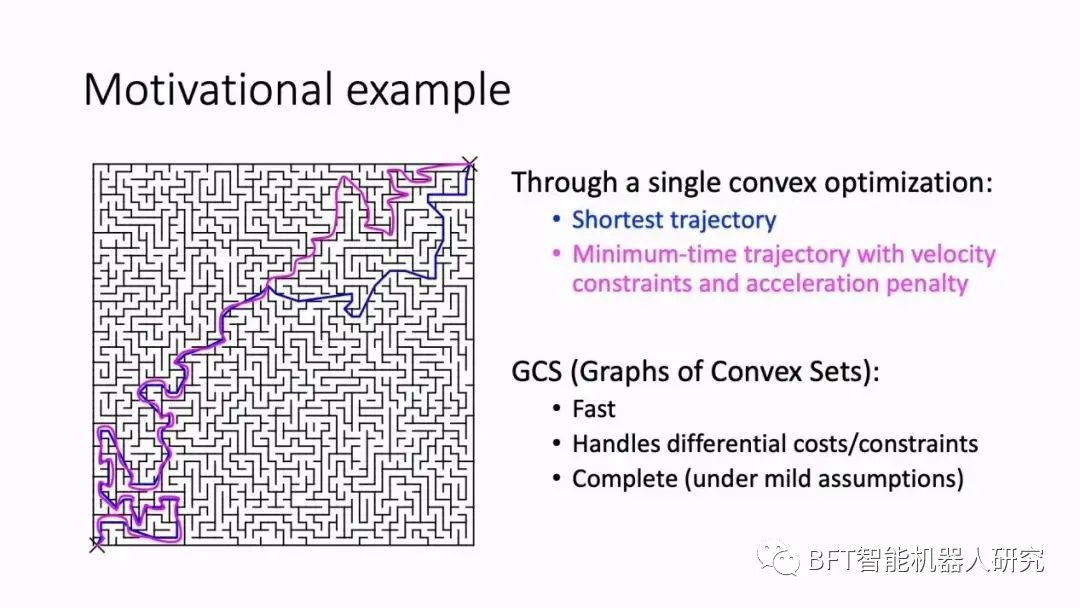
由CSAIL领导的项目在较短时间内一直比可比较的规划者找到更短的路径,显示了GCS在复杂环境中高
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2716
2716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









