



 人形机器人初创公司Figure展示了其Figure01机器人,具备动态双足行走技术,旨在解决劳动力短缺问题。该机器人设计用于苦力劳动,有望在未来帮助执行更复杂任务。Figure团队在短时间内取得重大技术突破并获得融资支持。
人形机器人初创公司Figure展示了其Figure01机器人,具备动态双足行走技术,旨在解决劳动力短缺问题。该机器人设计用于苦力劳动,有望在未来帮助执行更复杂任务。Figure团队在短时间内取得重大技术突破并获得融资支持。
原创 | 文 BFT机器人

半年前,满屏的人形机器人初创企业诞生、公司融资,马斯克宣称人形机器人会比电动车更好卖,芯片巨头英伟达的黄仁勋称“AI的下一个浪潮是具身智能”,人形机器人的iPhone时刻已经到来成了大家公认的答案。
但作为刚刚起步的阶段,人形机器人绝大多数仍在PPT里,甚至只是CAD工程图里加工来的渲染图,并没有出现许多炸裂的新品展示。
现如今,半年时间过去,人形机器人公司们纷纷交作业,展示他们的最新研究成果。
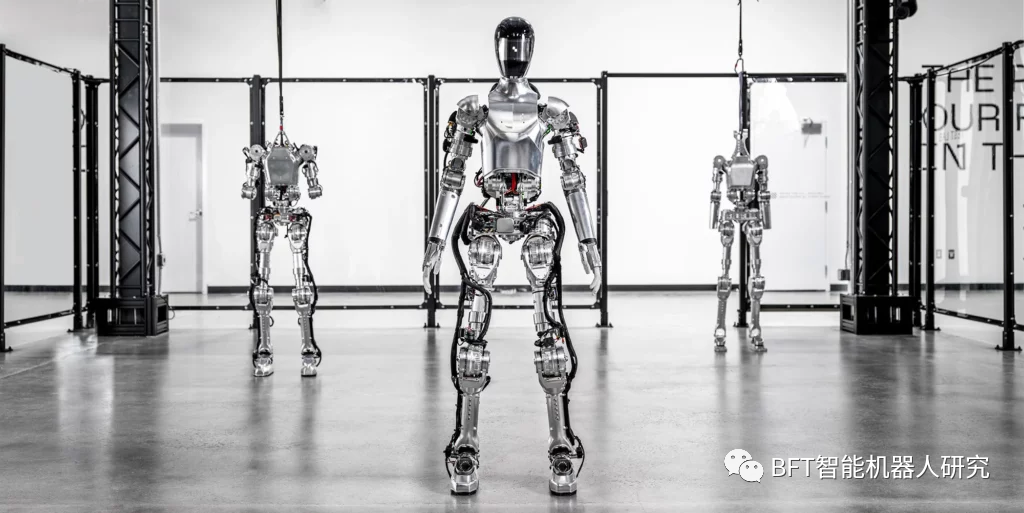
近日,位于加利福尼亚州的一家专门从事机器人技术的初创公司Figure发布了一段视频,视频中向大众展示了其名为Figure 01的人形机器人首次公开迈出第一步。早在今年被称为人工智能月的三月里,该公司就公布了一个对标特斯拉擎天柱的项目——将研发一款通用型全能人型机器人。
该机器人设计主要是用于执行苦力劳动,例如搬运重物,最终解决美国的劳动力短缺问题。这款人形机器人模仿人体形态,目的是完成人们不想做或无需技能的工作,并最终可以帮助人类解决更高级的任务,如照顾老年人甚至烹饪餐点。
动态双足行走
Figure 01目前最大的特点之一在于其能够执行“动态双足行走”。与传统的机器人行走方法不同,传统方法侧重于将质心保持在与地面的接触点之上,而“动态双足行走”则依赖于动量来保持平衡。这意味着它可以根据所需的速度和方向调整其关节处的扭矩。这一进步不仅代表了技术上的进展,还对人类与机器人之间的互动产生了重要影响。
同样,Figure团队正在努力开发机器人在摔倒情况下的安全行为,这对于在不受控制的环境中使用机器人来说是一个基本的考虑。
高效设计
机器人采用纤瘦设计不仅仅是美学考虑,它还意味着需要移动的质量更低,从而使机器人的能源效率更高。此外,这种设计会影响人类对这个类人机器人的感知和互动,使其显得不那么令人不安。Figure 01有一个受“比赛头盔”启发的头部,其中包括一个LCD屏幕,可用于与用户进行交流。
在过去的一年里,Figure的团队扩大到60人,聘请了人工智能、控制、嵌入式软件、电气、机械、执行器设计、电池、集成和测试等各个领域的专家。2023 年 5 月,该公司宣布获得了 7000 万美元的融资,并在 12 个月多一点的时间里开发了机器人。
Figure团队在不到一年的时间内实现了“动态双足行走”,这被认为是全新人型机器人项目的一个记录。Figure的创始人Brett Adcock表示,Figure人型机器人还具备自主地捡东西、搬运物品和自主导航的能力。不过,他们尚未发布展示这些能力的视频。
该公司在其桑尼维尔总部建立了一个演示仓库,这表明Figure 01在2024年发布时最有可能出现早期市场机会。
作者 | Azukii
排版 | 小河
审核 | 猫
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。

















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









