




原创 | 文 BFT机器人
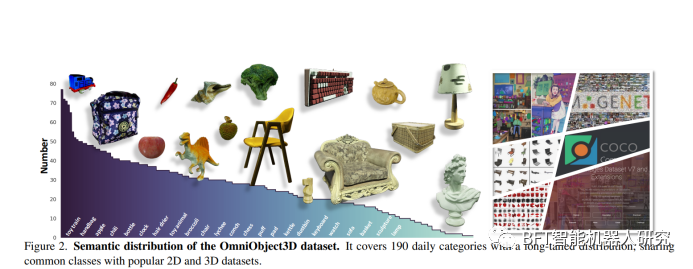
这篇论文的主要目标是介绍和探索OmniObject3D数据集,该数据集包含大量真实扫描的3D物体,涵盖了190个类别,提供了多种丰富的注释,包括纹理3D网格、采样点云、多视图图像等。作者将OmniObject3D应用于多个3D视觉任务,包括交叉场景的新视角合成、神经表面重建和3D物体生成,并通过实验展示了数据集在这些任务中的效果和应用。
01
OMNIOBJECT3D数据集
论文首先介绍了OmniObject3D数据集的构建和特点。该数据集包含大约6000个来自190个类别的3D物体,具有高质量的扫描和注释。数据集提供了多种类型的注释,如3D网格、点云、多视图图像等,为研究人员在多个3D视觉任务中提供了丰富的材料。
02
交叉场景新视觉合成实验
在这个实验中,作者将不同的新视角
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









