 VoxelNet:3D对象检测的端到端学习
VoxelNet:3D对象检测的端到端学习





 VoxelNet是一种基于点云的3D检测新方法,利用深度学习和体素网格进行端到端训练。它在稀疏3D点上操作,并通过数据增强提升性能。在KITTI基准上,VoxelNet在汽车、行人和骑自行车者的检测任务中表现出最先进的结果,优于其他基于LiDAR的3D检测技术。
VoxelNet是一种基于点云的3D检测新方法,利用深度学习和体素网格进行端到端训练。它在稀疏3D点上操作,并通过数据增强提升性能。在KITTI基准上,VoxelNet在汽车、行人和骑自行车者的检测任务中表现出最先进的结果,优于其他基于LiDAR的3D检测技术。
原创 | 文 BFT机器人
01
摘要
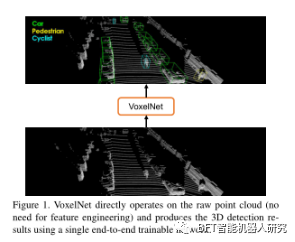
论文提出了表述了一个新的基于点云的3D检测方法,名为VoxelNet,该方法是一个端到端可训练的深度学习架构,利用了稀疏点云的结构特性,直接在稀疏的3D点上进行操作,并通过高效的并行处理体素网格来获得性能的提升。
此方法在KITTI基准数据集上进行了实验,并展示了VoxelNet在基于激光雷达的汽车、行人和骑自行车者检测任务中取得了最先进的结果。实验表明,VoxelNet在很大程度上优于最先进的基于LiDAR的3D检测方法。
02
VoxelNet框架
如图二所示,这是一个通用的3D检测框架,可以同时从点云中学习判别特征表示,并以端到端方式预测准确的3D边界框。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1309
1309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









