




原创 | 文 BFT机器人

01
论文内容
这篇论文是关于点云分割中金字塔架构的多尺度处理的详细解读。
点云数据的语义分割是自动驾驶和其他应用中的关键任务。在这项工作中,作者指出了在点云分割中移动U形结构的紧迫需求和巨大好处,并受到图像分割领域最新进展的启发,提出了一种用于点云分割的金字塔架构。
点云数据是由大量的三维点组成的,每个点都具有坐标和其他属性信息。点云分割的目标是将点云中的每个点分配到其对应的语义类别中,例如建筑物、道路、车辆等。然而,点云数据的特点是具有不同的尺度和密度,因此在进行语义分割时需要考虑多尺度的信息。
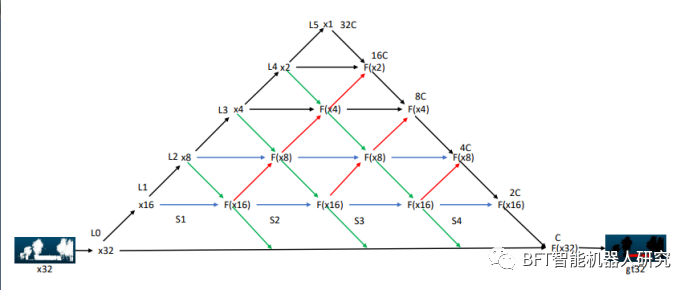
在传统的点云分割方法中,常常使用编码器-解码器架构,其中编码器用于提取点云的特征表示,解码器用于将特征映射回点云空间并进行语义分割。然而,这种结构在处理多尺度信息时存在一些限制。为了解决这个问题,作者提出了一种金字塔架构,以实现点云分割中的多尺度处理。
金字塔架构的核心思想是在不同的尺度上进行特征提取和融合。通过引入多个编码器和解码器,金字塔架构可
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 333
333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









