




原创 | 文 BFT机器人

本论文提出了一种新颖的方法,使用仅触觉来进行主动物体识别。该算法通过蒙特卡罗树搜索来选择最佳的手腕姿态序列进行物体识别。
具体来说,该算法将问题建模为马尔可夫决策过程(MDP),并通过观察和动作来优化策略。该算法的核心思想是,连续触觉特征与机器人之间的运动相关联。本地特征不是唯一的,会在对称部位和相似曲率处重复。
将它们在物体上离散化会创建共同的特征,可以建模为概率分布,该分布可以在观察和动作的条件下进行建模,而不受大状态空间维数的影响。在物理引擎和真实机器人上进行的实验结果表明,该算法可以在不同的环境中实现高效的物体识别。
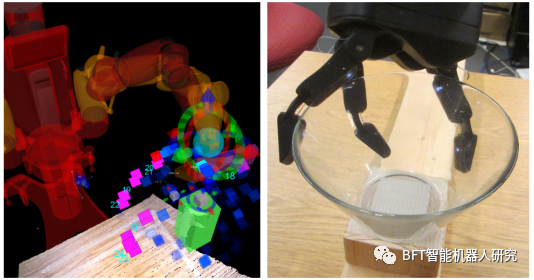
图1 左:实验设置。右:一个自适应选择的姿势
01 算法如何选择最佳的姿态序列对物体识别?
该算法通过蒙特卡罗树搜索来选择最佳的手腕姿态序列进行物体识别。具体来说,该算法将问题建模为马尔可夫决策过程(MDP),并通过观察和动作来优化策略。该算法的核心思想是,连续触觉特征与机器人之间的运动相关联。
本地特征不是唯一的,会在对称部位和相似曲率处重复。将它们在物体上离散化会创建共同的特征,可以建模为概率分布,该分布可以在观察和动作的条件下进行建模,而不受大状态空间维数的影响。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









