




 本文介绍了ROS中的几个关键可视化工具,包括rqt_console用于日志输出,rqt_graph展示计算图,rqt_plot进行数据绘图,rqt_image_view处理图像,重点讲解了rviz的三维可视化功能,它能展示机器人模型、传感器信息、运动状态等,并支持用户交互控制。此外,还提及了Gazebo作为三维物理仿真的强大平台,适用于机器人算法测试和设计。
本文介绍了ROS中的几个关键可视化工具,包括rqt_console用于日志输出,rqt_graph展示计算图,rqt_plot进行数据绘图,rqt_image_view处理图像,重点讲解了rviz的三维可视化功能,它能展示机器人模型、传感器信息、运动状态等,并支持用户交互控制。此外,还提及了Gazebo作为三维物理仿真的强大平台,适用于机器人算法测试和设计。
Qt工具箱
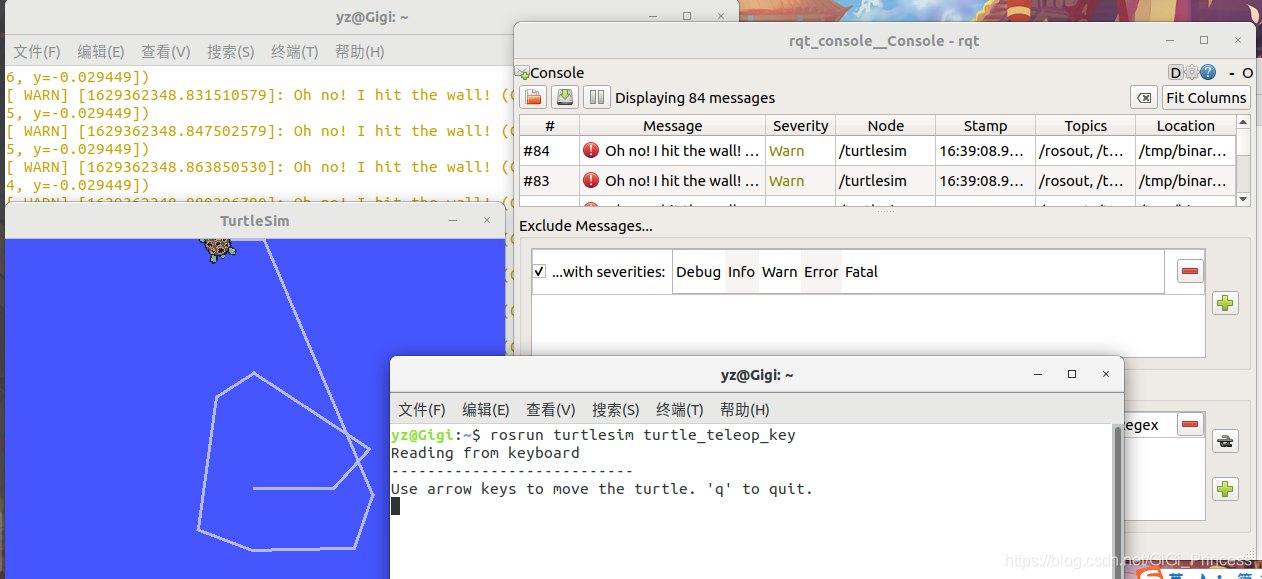
日志输出工具———rqt_console
计算图可视化工具——rqt_graph
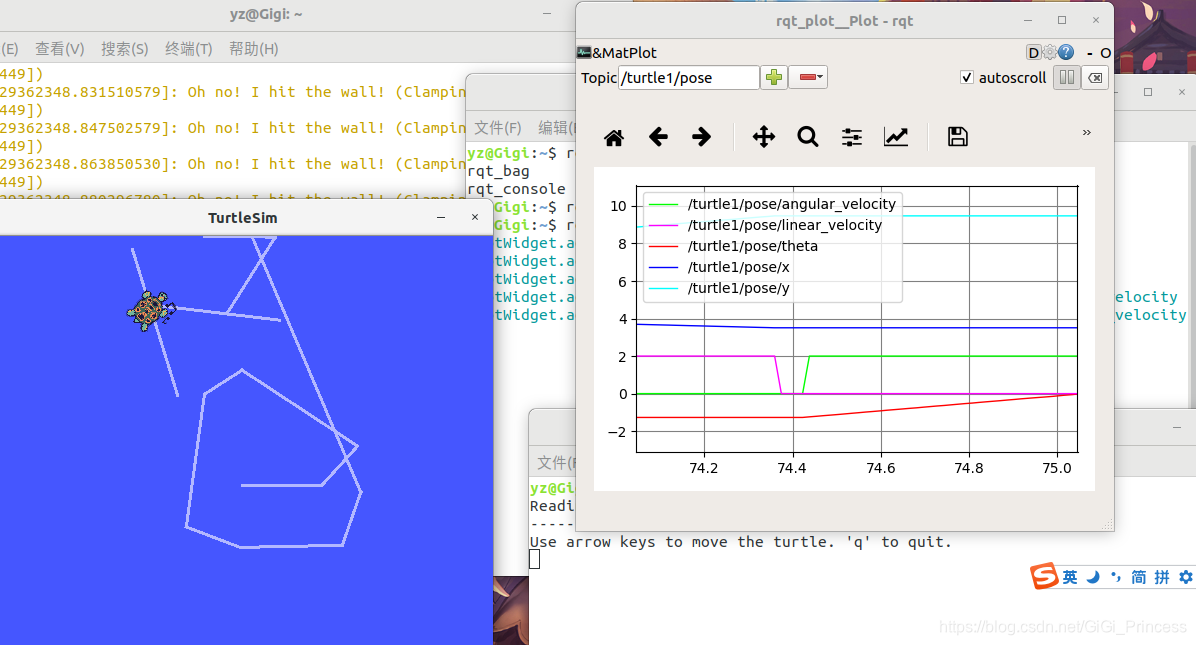
数据绘图工具——rqt_plot
图像渲染工具——rqt_image_view
这个需要连接摄像头,显然我没有~ 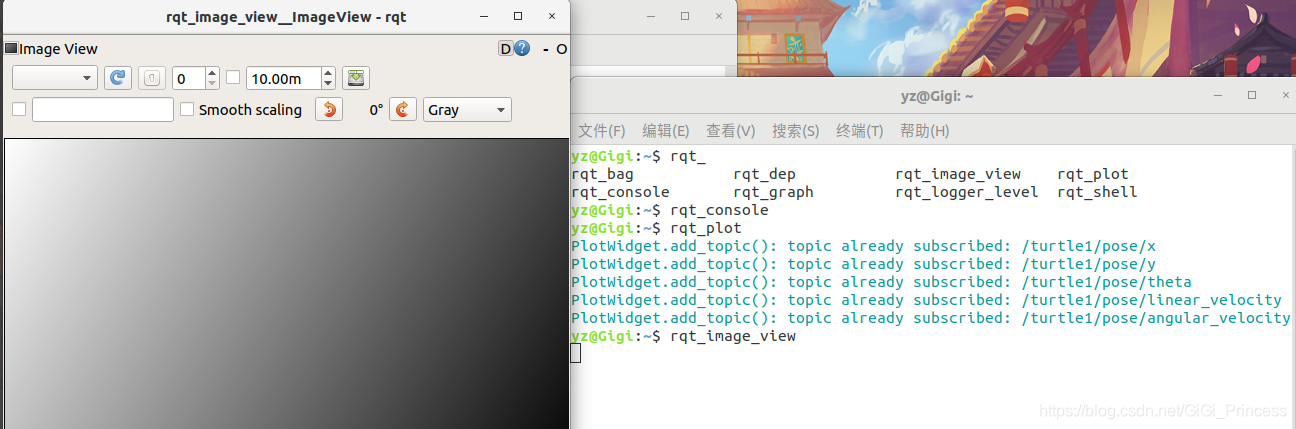
==================================
rviz 是很重要的一个三维可视化工具,可以兼容基于ROS软件框架的机器人平台
机器人模型、坐标、运动规划、导航、点云、图像
- 在rviz中,可以使用可扩展标记语言XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界面中呈现出来。
- 同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等信息。
- 总而言之,rviz通过机器人模型参数、机器人发布的传感信息等数据,为用户进行所有可监测信息的图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 399
399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









