



 随着自动驾驶技术的发展,4D毫米波成像雷达成为行业新宠。传统毫米波雷达的局限性促使技术升级,各大供应商如大陆、华为、恩智浦等纷纷投入研发,推动高阶自动驾驶的量产竞赛。纳瓦电子凭借其6级联18T24R的4D毫米波雷达,展现出高分辨率、高精度及360度环绕成像的独特优势,有望在国产供应商中脱颖而出。公司通过严格的实验室测试和自动化生产线,确保产品的质量和性能,为智能驾驶的L2-L4级别落地提供关键技术支持。
随着自动驾驶技术的发展,4D毫米波成像雷达成为行业新宠。传统毫米波雷达的局限性促使技术升级,各大供应商如大陆、华为、恩智浦等纷纷投入研发,推动高阶自动驾驶的量产竞赛。纳瓦电子凭借其6级联18T24R的4D毫米波雷达,展现出高分辨率、高精度及360度环绕成像的独特优势,有望在国产供应商中脱颖而出。公司通过严格的实验室测试和自动化生产线,确保产品的质量和性能,为智能驾驶的L2-L4级别落地提供关键技术支持。
进入智能汽车大规模量产“元年”,各大车企都在全力升级自身的硬件配置,并进行一系列复杂场景的路测数据积累,一场围绕高阶自动驾驶的量产“排位赛”已经拉开帷幕。
随之,作为核心传感器之一的传统毫米波雷达也进入了升级换代与突破创新的关键阶段。可以看到,4D毫米波成像雷达现已成为主流的升级方向之一,全球范围内包括大陆、华为等公司已经陆续宣布4D毫米波成像雷达的量产和合作项目计划。
而作为全球毫米波雷达芯片的头部供应商,恩智浦也正在带动这一波4D毫米波成像雷达升级潮的加速。作为业界首款专用16nm成像雷达处理器,恩智浦宣布S32R45将于今年上半年首次用于客户量产。
对国产供应商来讲,新的赛道已打开,谁能率先以优质性能量产占位,谁就有机会拿到自动驾驶新时代的入场券。
技术“大洗牌”
一方面,前装搭载量仍处于快速增长通道。高工智能汽车研究院监测数据显示,2021年1-11月国内上市新车(乘用车+合资/自主/独资品牌)搭载前/角毫米波雷达上险量为1186.91万颗,同比上年同期增长44.55%。
另一方面,前装市场供应商份额正处于被突围的前夜。从技术方案角度看,随着雷达芯片方案商开始新一波硬件技术的迭代升级,在下一代高分辨率、4D毫米波成像雷达赛道,新晋公司与传统雷达巨头第一次站在同一起跑线上。
为什么会出现新一轮的技术热潮?
一直以来,多传感融合都被视为ADAS以及自动驾驶系统实现安全冗余的关键手段。
其中,毫米波雷达擅长测量距离、角度和速度,其全天候抗干扰的优势明显,对环境的适应性超过激光雷达等。
但与摄像头和激光雷达相比,角度分辨率不足,对高度测量不精确,同时也存在无法高密度点云成像、有效解析目标的轮廓与类别,检测静止目标、较小目标等性能问题。在高阶自动驾驶感知系统中逐渐显得“力不从心”。
而特斯拉考虑未来可能会“弃用”传统毫米波雷达,也正是因为现阶段传统毫米波雷达与视觉能力性能的不匹配从而造成融合感知的置信度瓶颈。
但4D毫米波高精成像雷达的出现将彻底改变这一局面。
“一个直观的数据,传统的雷达无法识别150米以外静止的易拉罐,但是4D毫米波成像雷达可以看到。在数据方面,其可达到每秒32000个点云数据。”纳瓦电子CEO李建林表示。
同时,4D毫米波成像雷达也拥有对于静止物体的高分辨能力。除了150°水平面外,也增加了对于垂直面45°的俯仰分辨能力,这样雷达就能够绘制目标高度和物体的轮廓从而实现雷达的成像。
独家“杀招”
对于这个令人欣喜的技术,从2015年入局毫米波雷达至今,已积累丰富量产经验的纳瓦电子当然也早有准备。
与其他友商相比,纳瓦电子4D毫米波高精成像雷达除了虚拟通道增加、点云数据倍增、超高分辨率外还具有以下技术创新特点:
基于多年微波天线和算法的积累,纳瓦电子推出的6级联18T24R、432通道的4D毫米波高精成像雷达,大幅提升了目标检测的置信度和检测范围,同时进化出与激光雷达一样的高密度点云,可带来丰富的感知增强应用;
在识别较小的物体,对遮挡物体、静止物体和横向移动障碍物的检测,应用更多复杂路况,提高系统融合后的安全性;
此外,该4D毫米波高精成像毫米波雷达采用全新设计的HBF(Hybrid Beamforming) 混合波束成形结合DML技术将一维角分辨率提高到≤1.5°度以内,并显著降低MIMO数字信号处理的复杂度,降低运算平台成本。
为了应对复杂的干扰环境,其采用复杂编码调制的MIMO虚拟天线技术具有低干扰和更高的抗干扰能力;
与TD-MIMO相比大幅缩短了雷达收发的工作时间,降低对其他无线电设备的干扰可能性,尤其在Massive MIMO的4D毫米波成像雷达较常规TD-MIMO雷达上更具优势;
同时,采用独创的稀疏重建算法结合对应的天线阵列设计,显著降低4D毫米波成像雷达的硬件设计复杂度、数据量,同时大幅提升了成像质量。
不过,在雷达界,不同门派各自的发家技术都有所差别,杀手锏当然也各有侧重。
这家公司推出的4D毫米波成像雷达可实现360°的整车环绕成像效果,在业内别无他例!
据了解,目前业内产品可实现的FOV范围基本只在120度至150度之间,而实现360度环绕覆盖关键点在于如何处理角度重叠部分的点云数据。
“汽车周边围绕四颗雷达时,则会导致部分数据的重叠。其中一颗覆盖120度,那么四颗就是480度,这就会带来很多控制策略上的干扰。”李建林介绍。
另外,为了避免雷达在山地、沙漠、草原等不平整路面引发震动与位移,纳瓦又在现有4D的基础上推出了六轴姿态成像雷达,确保雷达在各种坑洼崎岖的路面上始终保持180°平行,精准探测周边的物体。
“自动驾驶走入更高级别就要适应更复杂的路况。而当传感器伴随汽车位移时,不管是激光还是毫米波都会发生偏转,而肉眼不可见的一点偏转对于传感器来讲至少是10°以上的误差,如果这种误差解决不好,就会带来一些虚假目标。我们通过算法校正位置的偏差,使传感器精准点云数据的输出”,李建林表示。
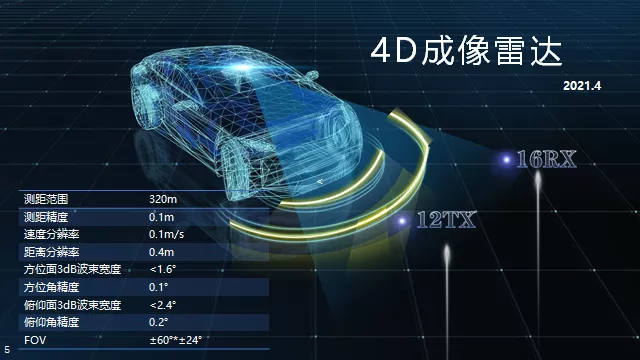
据了解,纳瓦电子推出的4D毫米波成像雷达测距范围可达320m,测距精度0.1m;方位面3dB波束宽度小于1.6°,方位角精度0.1°;俯仰面3dB波束宽度小于2.4°,俯仰角精度0.2°。
业内人士评价,该款产品是业内成熟度最高,最贴合中国市场的唯一一款可量产,可商用的4D毫米波成像雷达。
李建林表示,纳瓦电子将于2022年推出360度4D毫米波成像雷达、六轴姿态成像雷达两款高性价比雷达产品,助力智能驾驶在L2-L4的落地。
技术外的助力
目前,纳瓦电子拥有车载毫米波雷达领域专利技术100余项,也是中国汽车工业协会团体标准T/CAAMTB 15-2020《车载毫米波雷达测试方法》主要起草单位。
李建林直言,“一款毫米波雷达的开发需要花费大量的时间进行版本迭代4-5次,用时3-4年,如果没有3-4年持续对一款产品持续迭代,并将大量时间沉淀在实验室、工厂、测试上,不可能将产品做好。”
为此,纳瓦电子建有微波暗室,射频实验室,一吨推力的震动实验室,全自动雷达(End Of Line)检测站,实现全自动的雷达测试。
其主要设备包括高精度转台和雷达目标模拟器、工控机、高精度万用表、功率计、三角反射器等。主要测项为目标模拟相关测向,包含雷达参数测量、系统灵敏度、雷达参数校准、场景测试、chirp分析等。
据介绍,设备的机械臂可自动上下料,实现77GHz 雷达全自动化校准,标定与检测 。同时将校准检测数据自动上传MES系统,数据记录自动保存服务器,无需人工干预。
此外,该公司还在上海嘉定建有业界少有的77GHz毫米波雷达全自动化生产线,配有十万级无尘车间以及先进实验设备、测试设备,产线已于2020年10月进入大规模生产。
目前,纳瓦电子严格执行IATF16949质量管理体系指导方针,已于2021年5月获得IATF16949/ISO9001:2015体系认证,具备向汽车厂商百万级大规模供货能力。


















 426
426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









