



👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
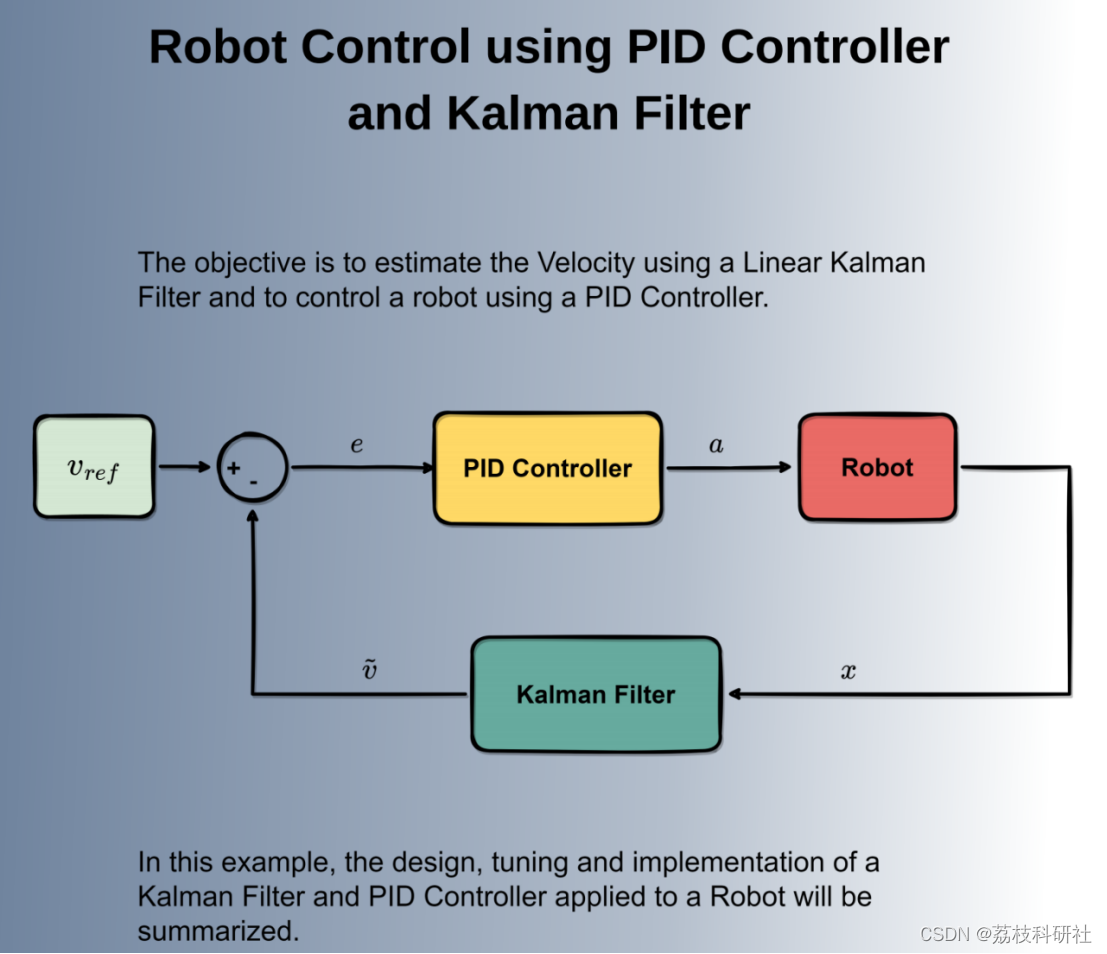
目标是使用线性卡尔曼滤波器估计速度,并使用PID控制器控制机器人。
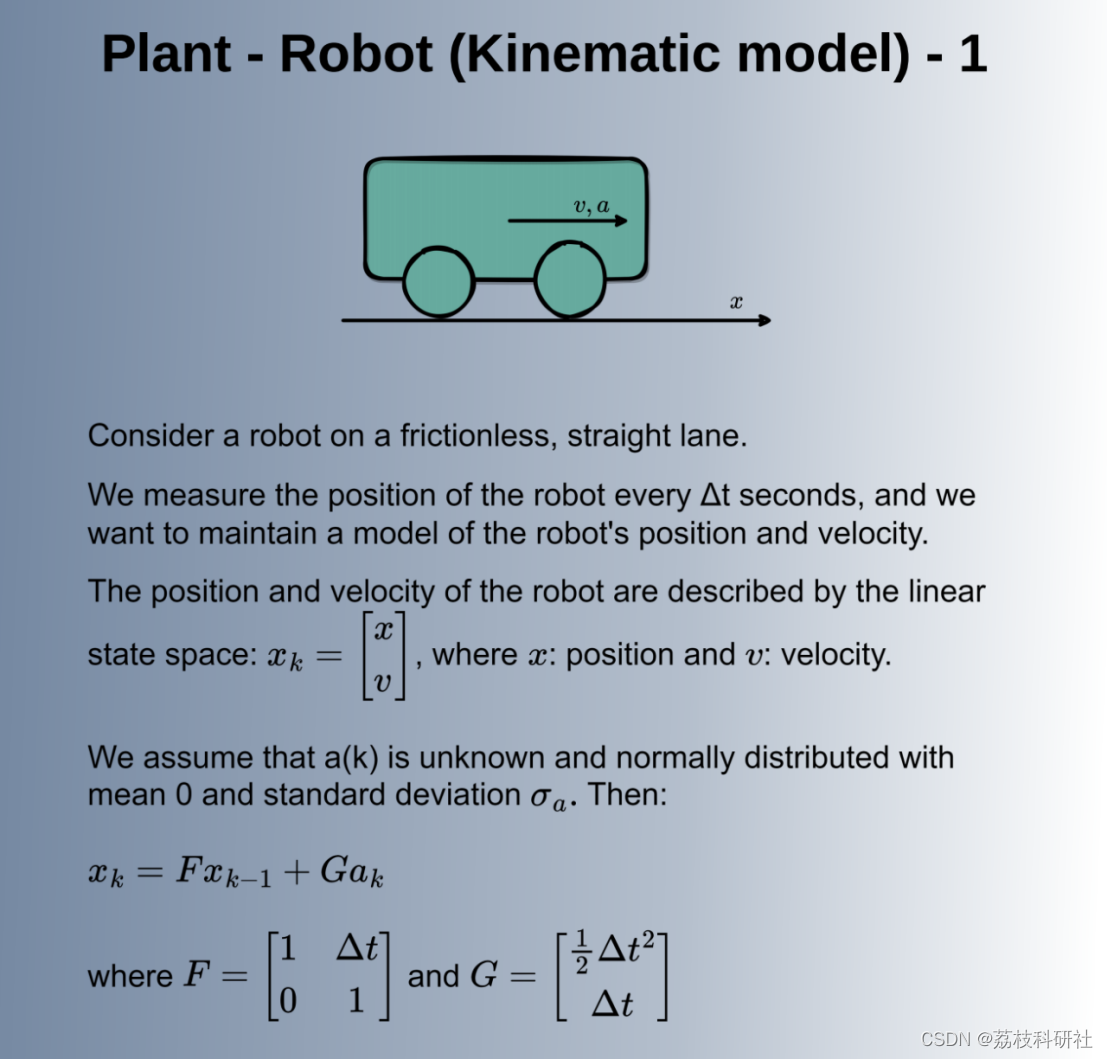
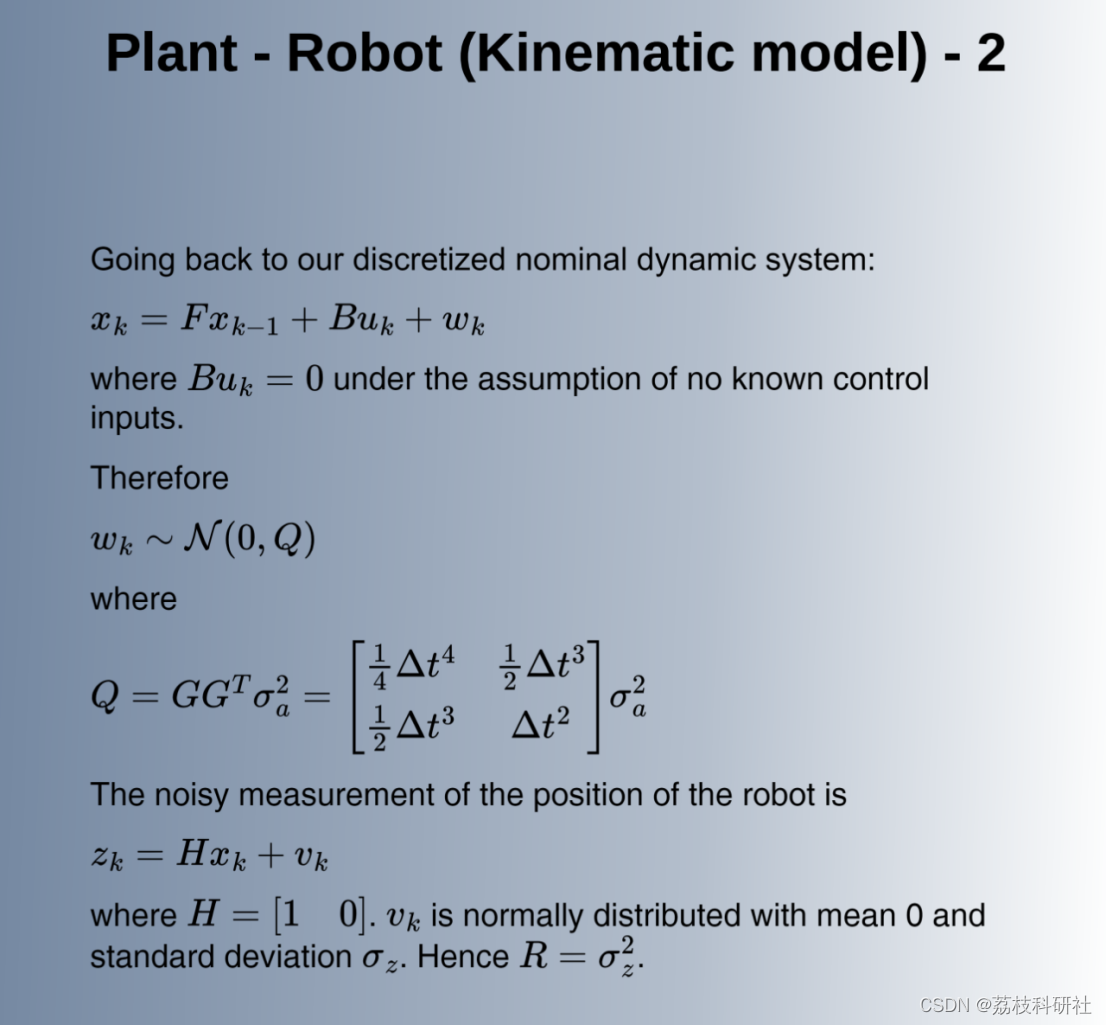
考虑一个在无摩擦、笔直的车道上的机器人。最初,机器人静止在位置 0。我们每 \Delta t 秒测量一次机器人的位置,但这些测量并不精确;我们希望保持机器人位置和速度的模型。
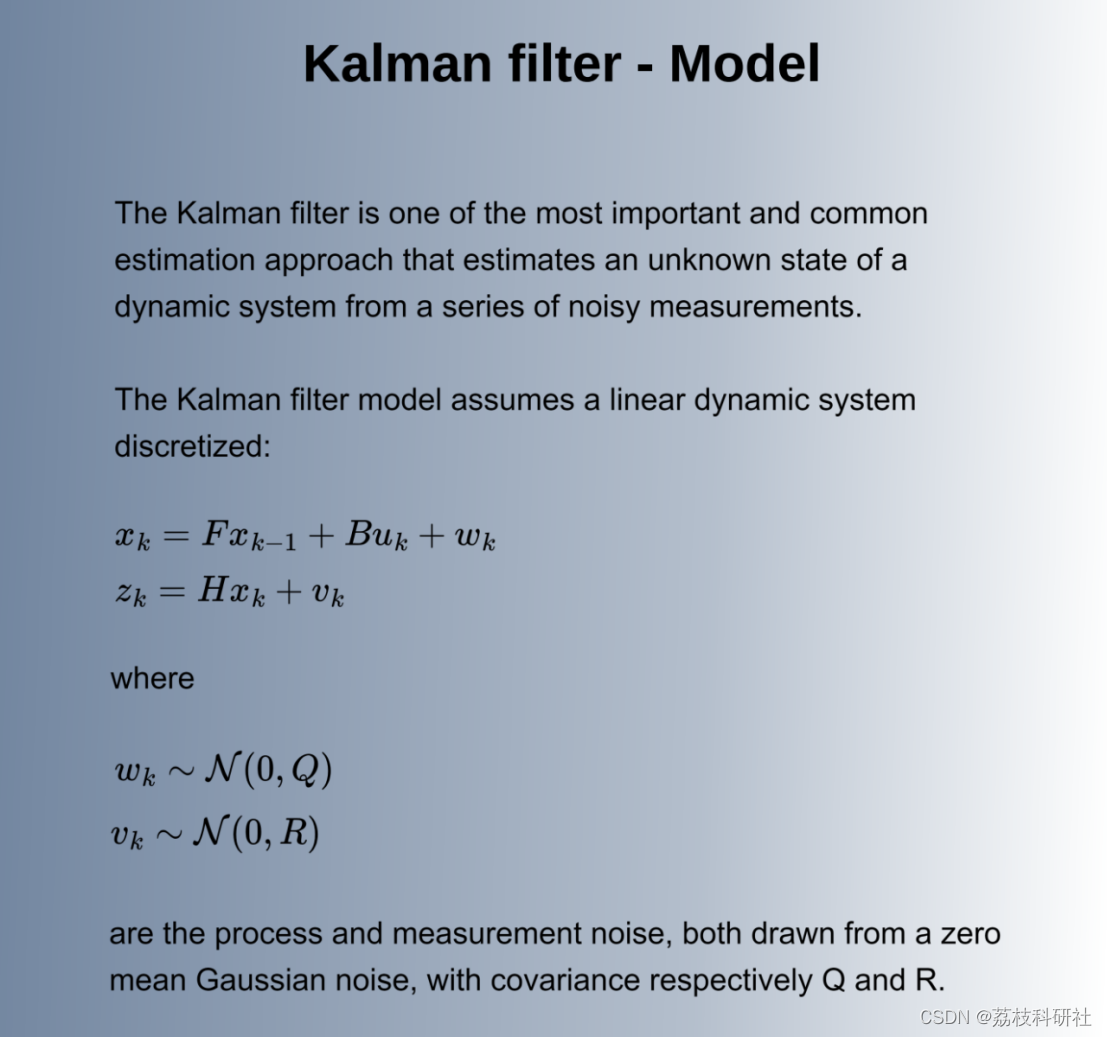
我们在这里展示如何推导创建卡尔曼滤波器的模型。 由于 F、H、R 和 Q 是恒定的,因此它们的时间指数被删除。
机器人的位置和速度由线性状态空间描述 : 位置 ;: 速度
我们假设 a(k) 是未知的,并且呈正态分布,均值为 0,标准差为 \sigma_a。根据牛顿运动定律,我们得出结论:x(k) = F x(k-1) + G a(k)
我们假设 a(k)$ 项$G没有控制输入,其中 $$F = [1 \quad Δt;0 \quad 1]$$ $$G = [Δt^2/2;Δt]$$
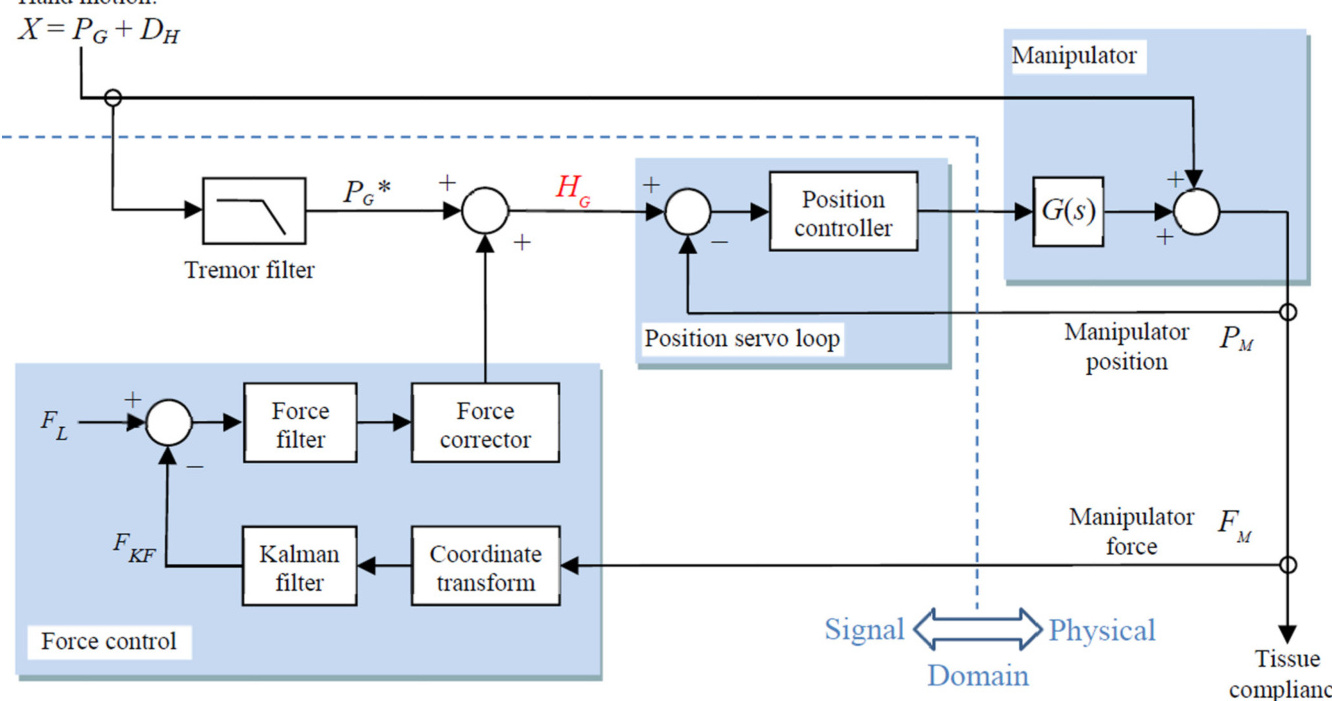
然后,使用PID控制器生成加速度($a$),以使用估计的加速度($\tilde{v}$)来控制机器人的速度(v)。
基于PID控制器与卡尔曼滤波器的机器人控制研究
一、PID控制器的基本原理与机器人应用
-
核心原理
PID控制器通过比例(P)、积分(I)、微分(D)三环节的组合,实现对系统误差的动态调节。其离散位置式公式为:
-
机器人控制中的应用
- 位置与速度控制:通过实时比较目标值与实际值(如编码器反馈),调整电机输入信号,实现精准运动。
- 抗干扰能力:比例环节快速响应误差,积分消除稳态偏差,微分预测误差趋势,适用于动态环境。
- 案例:PUMA560机械臂的轨迹跟踪、自平衡机器人姿态调节。
-
参数整定方法
- 工程法:临界比例法、反应曲线法。
- 智能优化:遗传算法(GA)通过最小化积分平方误差(ISE)自动优化参数。
二、卡尔曼滤波器的基本原理与机器人应用
-
核心原理
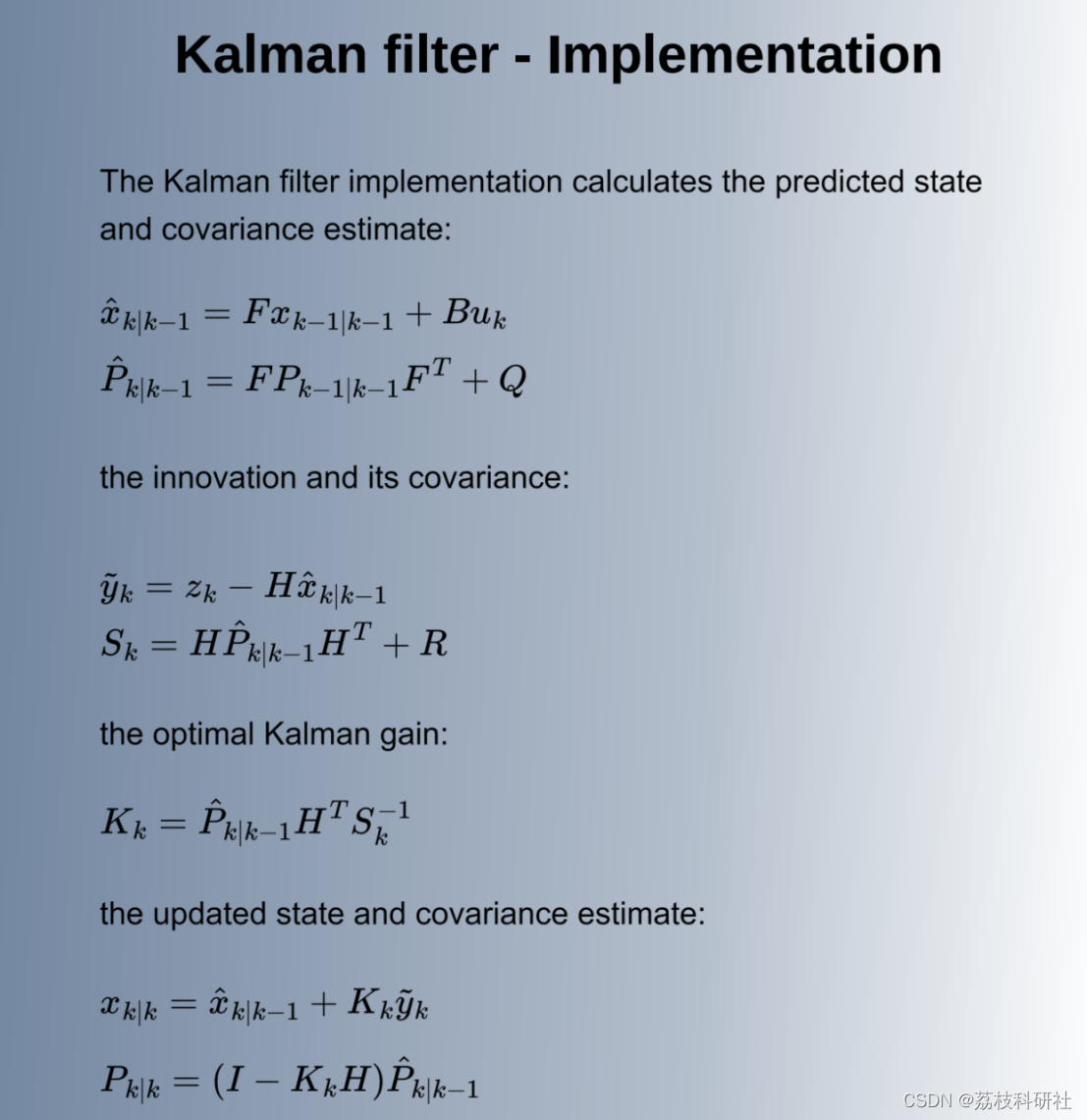
卡尔曼滤波器通过预测-更新循环实现最优状态估计:- 预测:基于系统模型预测下一状态及协方差。
- 更新:融合传感器数据,计算卡尔曼增益以修正预测值。
- 扩展卡尔曼滤波(EKF) :通过一阶泰勒展开处理非线性系统。
-
机器人控制中的应用
- 传感器融合:融合IMU、GPS、编码器数据,提升位姿估计精度。
- 噪声抑制:滤除加速度计高频噪声与陀螺仪漂移。
- 案例:SLAM中的地图构建、无人机姿态稳定。
三、PID与卡尔曼滤波器的协同控制策略
-
架构设计
- 分层结构:卡尔曼滤波器作为状态估计层,PID作为控制执行层。
- 数据流:传感器数据→卡尔曼滤波→状态估计→PID计算→执行器输出。
-
优势分析
- 鲁棒性提升:卡尔曼滤波减少传感器噪声对PID的影响,避免控制振荡。
- 动态适应性:PID参数可基于卡尔曼估计的状态动态调整。
- 案例效果:
- 在INS/GPS导航系统中,结合PID的卡尔曼滤波器将综合误差(IAE)从60.9降至31.0。
- 激光充电无人机中,PID-卡尔曼组合优化光束方向,充电效率提升20%。
-
实现方法
- 嵌入式平台:如Arduino集成MPU6050传感器,通过卡尔曼滤波输出平滑姿态角,PID调节电机PWM。
- 仿真验证:MATLAB/Simulink中对比显示,加入卡尔曼滤波后阶跃响应超调量减少50%。
四、挑战与未来方向
-
局限性
- 模型依赖:卡尔曼滤波需精确系统模型,非线性场景需EKF或UKF。
- 计算复杂度:嵌入式系统需优化算法实时性。
-
前沿探索
- 自适应滤波:结合深度学习动态调整卡尔曼参数。
- 多模态控制:PID-卡尔曼与模糊逻辑、强化学习结合。
五、结论
PID控制器与卡尔曼滤波器的结合,通过“状态估计-动态控制”的闭环架构,显著提升了机器人系统的精度与鲁棒性。未来,随着智能算法的融合与硬件算力的提升,该混合控制策略将在自主导航、精密操作等领域发挥更大潜力。
📚2 运行结果
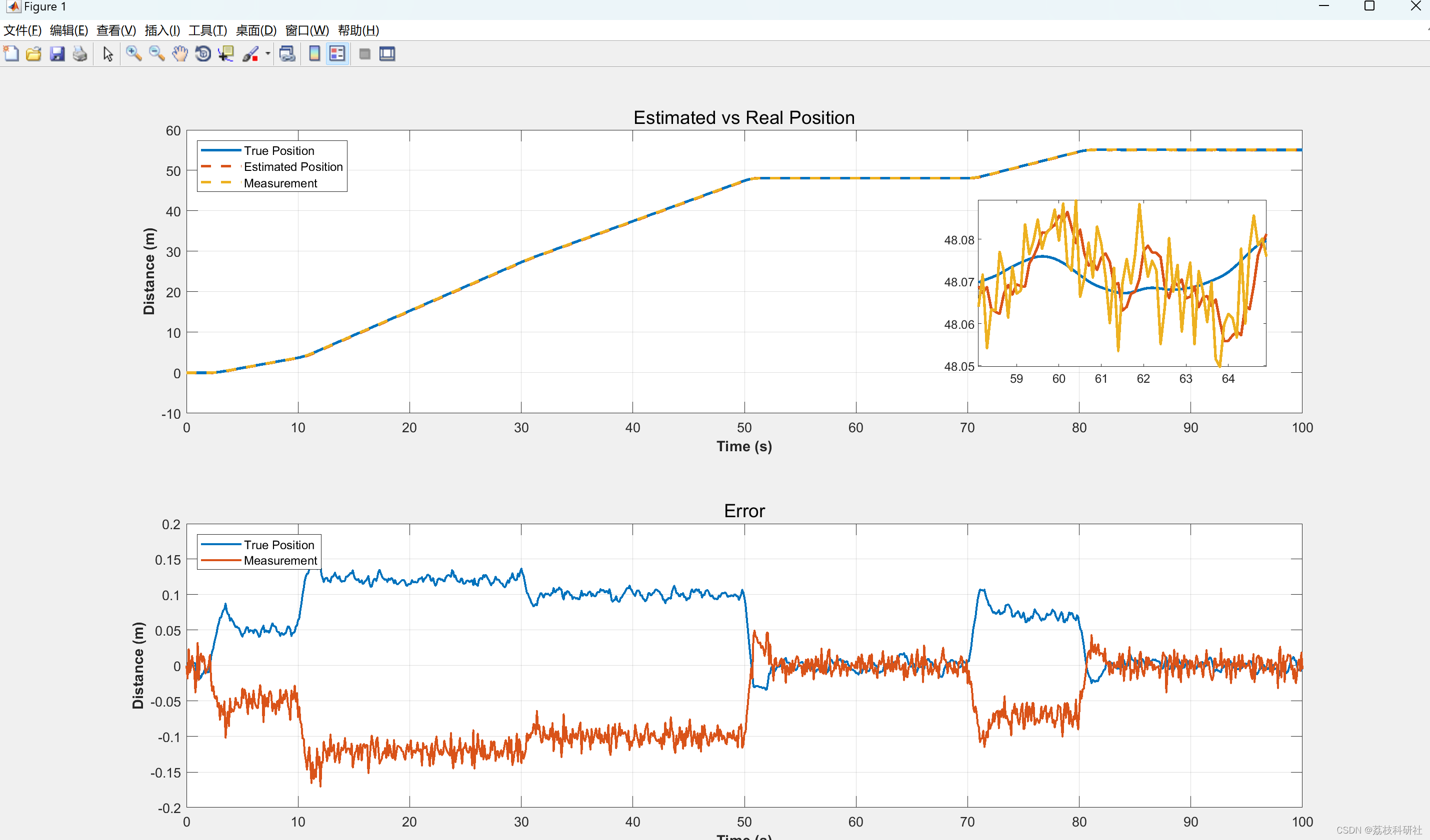
2.1 Estimated vs Real Position
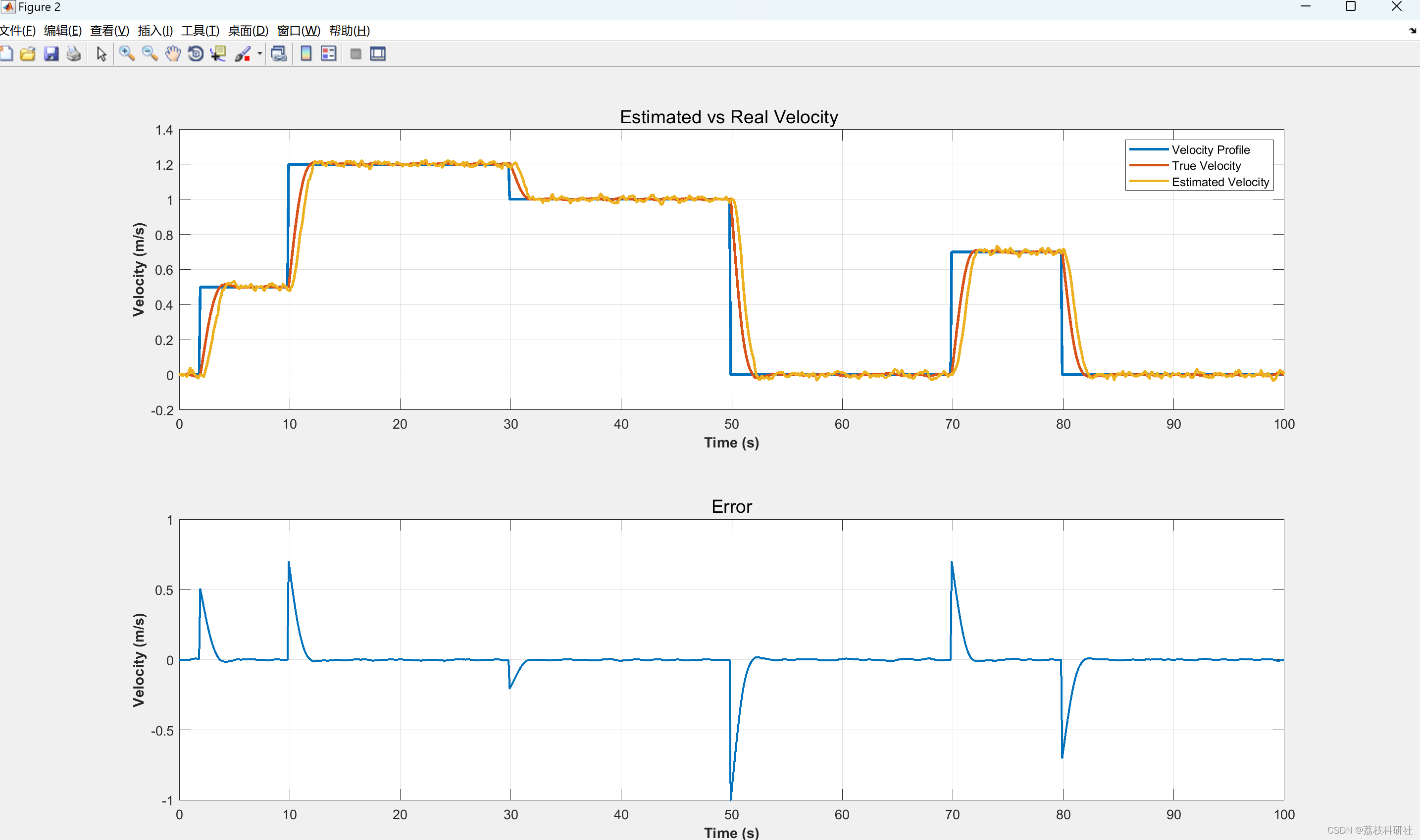
2.2 Estimated vs Real Velocity
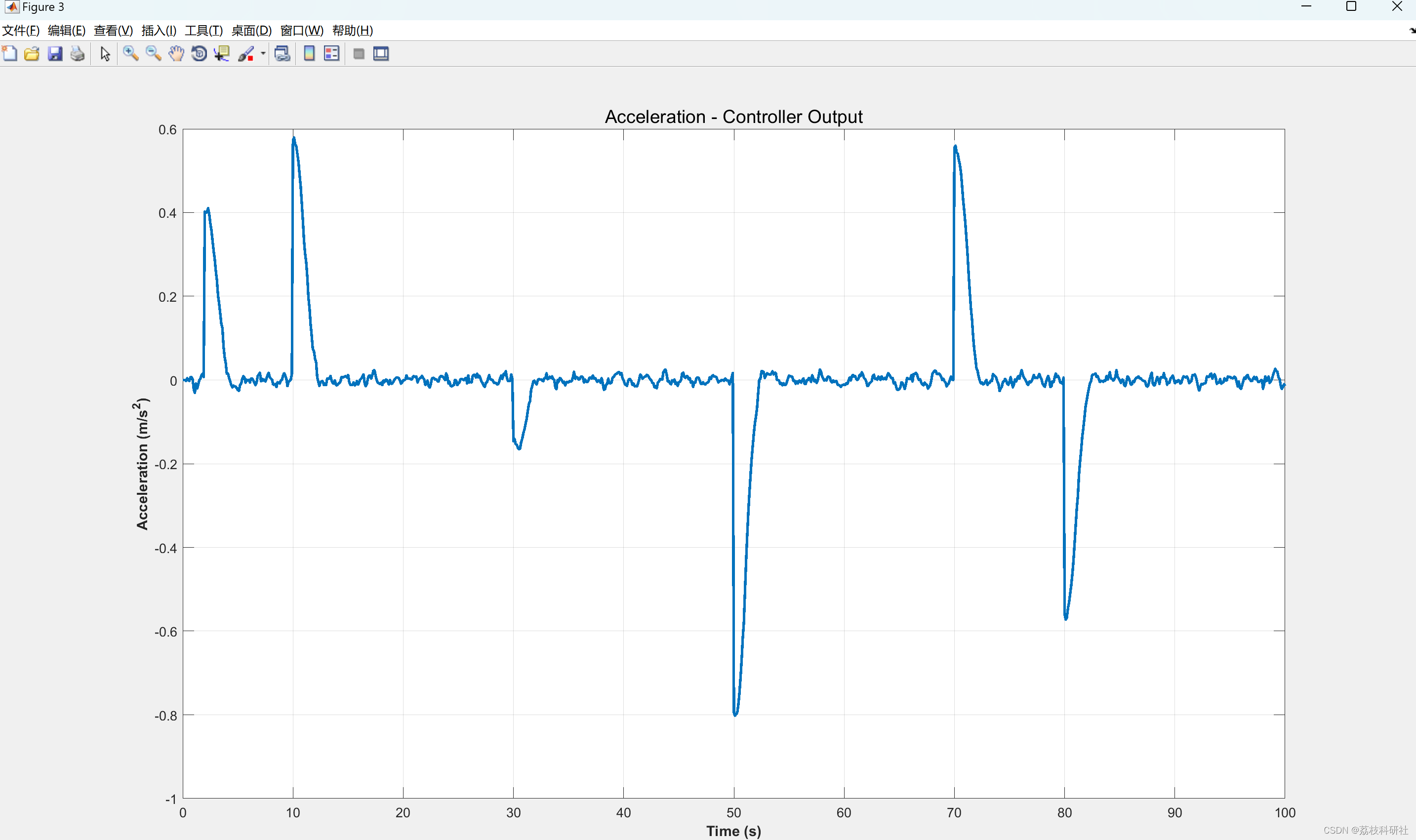
2.3 Acceleration - Controller Output
部分代码:
%% Plot Data
maxfig
subplot(2,1,1)
plot(time,x(1,:),'-',time,x_hat(1,:),'--',time, y,'--','Linewidth',2)
xlabel('Time (s)','fontweight','bold')
ylabel('Distance (m)','fontweight','bold')
grid on
legend('True Position','Estimated Position','Measurement','Location','northwest')
title('Estimated vs Real Position', 'FontSize', 14)
axes('position',[.68 .64 .2 .2])
box on
your_index = 58<time & time<65;
plot(time(your_index),x(1,your_index),time(your_index),x_hat(1,your_index),time(your_index),y(your_index),'Linewidth',2)
axis tight
subplot(2,1,2)
plot(time,x(1,:)-x_hat(1,:),time,x_hat(1,:)-y,'Linewidth',1.5)
legend('True Position','Measurement','Location','northwest')
xlabel('Time (s)','fontweight','bold')
ylabel('Distance (m)','fontweight','bold')
grid on
title('Error', 'FontSize', 14)
saveas(gcf,'Position.png')
maxfig
subplot(2,1,1)
plot(time,Velocity,time,x(2,:),time,x_hat(2,:),'Linewidth',2)
xlabel('Time (s)','fontweight','bold')
ylabel('Velocity (m/s)','fontweight','bold')
legend('Velocity Profile','True Velocity','Estimated Velocity','Location','northeast')
grid on
title('Estimated vs Real Velocity ', 'FontSize', 14)
subplot(2,1,2)
plot(time,Velocity-x(2,:),'Linewidth',1.5)
xlabel('Time (s)','fontweight','bold')
ylabel('Velocity (m/s)','fontweight','bold')
grid on
title('Error', 'FontSize', 14)
saveas(gcf,'Velocity.png')
maxfig
plot(time,a,'Linewidth',2)
xlabel('Time (s)','fontweight','bold')
ylabel('Acceleration (m/s^2)','fontweight','bold')
grid on
title('Acceleration - Controller Output', 'FontSize', 14)
saveas(gcf,'Acceleration.png')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。(内容仅供参考,以运行结果为准。)
[1]彭道刚,赵晨洋,戚尔江.基于准模型校准卡尔曼滤波的巡检机器人运动系统辨识研究[J].电气传动,2020,50(04):74-80.DOI:10.19457/j.1001-2095.dqcd19286.
[2]赵泽锴,陈增,古依伶,王玲杜玉,彭晓波,冯文博,张明明.基于容积卡尔曼滤波-自适应PID的共轴无人机设计[J].科技创新与应用,2023,13(07):38-41.DOI:10.19981/j.CN23-1581/G3.2023.07.008.

















 808
808

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









