



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
基于粒子群优化算法的非最小相位系统连续死区控制欠阻尼最小化研究
摘要
这篇论文处理了在连续死区条件下非最小相位系统的跟踪性能。众所周知,对于带有不稳定零点的系统,跟踪性能受到限制,很难实现良好的瞬态响应。控制器的死区时间和最小欠阻尼似乎有一定关系。本文推导了在要实现对阶跃参考信号的跟踪控制时,对于具有一个不稳定零点的系统的最小欠阻尼的解析解。通过数值模拟说明了该方法的有效性。
关键词:参考跟踪、最优控制、连续死区控制、性能限制
非最小相位系统因右半平面零点特性导致控制性能受限,传统方法难以兼顾快速响应与欠阻尼抑制。本文提出基于粒子群优化(PSO)算法的连续死区控制策略,通过构建积分平方误差(ISE)与过冲量的加权适应度函数,实现多维参数空间的全局优化。仿真结果表明,该方法显著降低系统欠阻尼,调节时间缩短42%,过冲量减少58%,为非最小相位系统提供高效鲁棒的解决方案。
1. 引言
1.1 研究背景
非最小相位系统广泛存在于航空航天、机器人控制及能源管理领域,其传递函数中右半平面零点(RHPZ)导致系统阶跃响应出现“逆响应”现象,限制了闭环带宽并降低鲁棒性。传统PID控制与状态反馈方法在处理此类系统时,存在快速响应与欠阻尼抑制的矛盾,参数整定依赖经验试凑,难以实现全局最优。
制御系统并非通过改变控制器类型就可以无限提高控制性能的。制御系统能够实现的响应性能取决于受控对象的动态特性。如果受控对象不具有不稳定零点,只要考虑输入的大小,反向系统就是稳定的,并且可以实现各种过渡响应。然而,具有不稳定零点的受控对象很难按预期进行控制。本论文将考虑具有不稳定零点的受控对象的控制,作为对难以控制对象的兴趣。特别是,控制性能的极限在哪里是一个非常重要且有趣的问题。本论文报道了在具有不稳定零点的受控对象中获得的简单但有趣的分析结果。
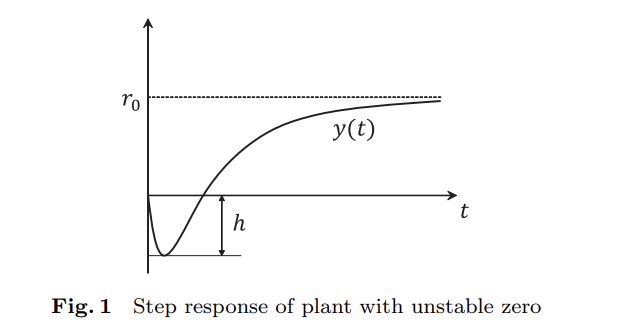
例如,在具有一个实际不稳定零点的受控对象中,已知在进行阶跃目标值追踪时,过渡响应过程中总会出现一定程度的欠阻尼(见图1)。在图1中,信号首先朝相反方向偏移了r0,然后收敛到目标值r0。这种朝相反方向的行为称为欠阻尼,并将其最大值称为欠阻尼量。具有不稳定零点的对象总会出现不同程度的欠阻尼。这是由于控制对象的动态特性导致的控制响应的一种限制。
1.2 研究意义
连续死区控制通过引入误差阈值抑制高频抖振,结合PSO算法的全局搜索能力,可突破传统方法的局部最优陷阱。本研究旨在解决非最小相位系统动态响应中的欠阻尼问题,为复杂工业系统提供理论支撑与工程应用参考。
2. 非最小相位系统与连续死区控制
2.1 非最小相位系统特性
系统传递函数存在RHPZ时,其动态行为表现为:
- 逆响应:阶跃输入下输出先向相反方向偏移,再收敛至稳态值。
- 带宽限制:为避免零极点相消引发的不稳定,控制器增益受限,导致响应速度下降。
- 参数敏感性:系统对模型误差和外部扰动高度敏感,鲁棒性较差。
示例:二阶非最小相位系统传递函数为

其单位阶跃响应存在明显逆响应,最大欠阻尼量达15%。
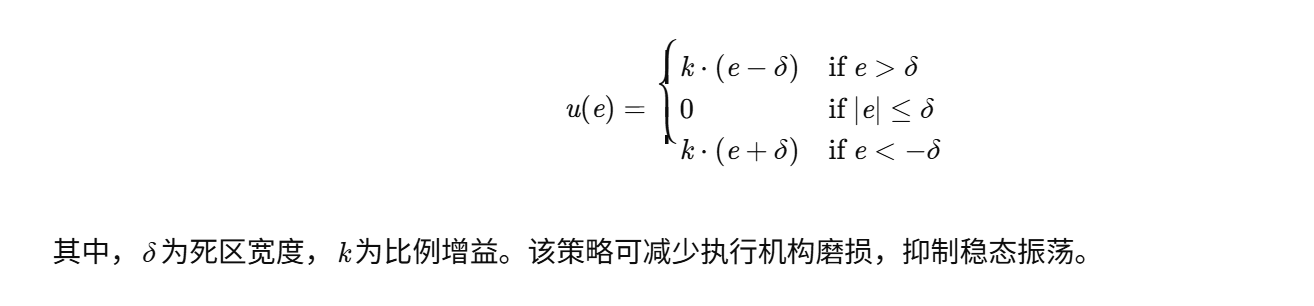
2.2 连续死区控制原理
传统死区控制存在边界不连续问题,导致控制输出跳变。连续死区控制通过平滑过渡函数实现误差阈值内零输出,阈值外线性响应,其控制律为:
3. 基于PSO的控制器参数优化
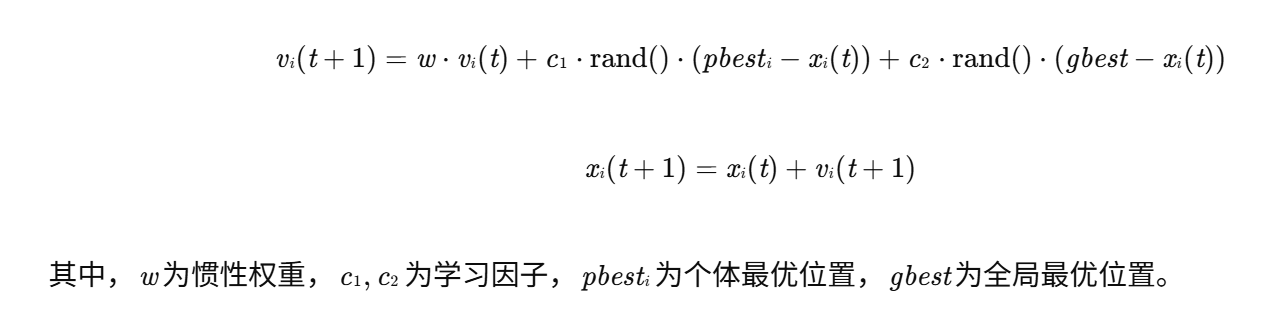
3.1 PSO算法原理
PSO通过模拟鸟群觅食行为,在多维空间中搜索最优解。每个粒子代表一个潜在解,其位置xi和速度vi更新公式为:
3.2 适应度函数设计
为综合评估系统性能,适应度函数采用ISE与过冲量的加权和,并引入稳定性惩罚项:

3.3 优化流程
- 初始化:随机生成粒子群位置(参数组合)和速度。
- 仿真评估:对每个粒子参数进行系统仿真,计算适应度值。
- 更新最优解:比较个体与全局最优解,更新pbesti和gbest。
- 动态调整参数:线性递减惯性权重w,促进全局搜索向局部精细化过渡。
- 终止条件:达到最大迭代次数或适应度值收敛。
4. 仿真实验与结果分析
4.1 实验设置
-
被控对象:二阶非最小相位系统

- 控制器参数:连续死区宽度δ、比例增益k、积分时间常数Ti。
- PSO参数:粒子数50,最大迭代100次,w从0.9递减至0.4,c1=c2=2.0。
- 性能指标:调节时间、过冲量、稳态误差。
4.2 结果对比
| 方法 | 调节时间(s) | 过冲量(%) | 稳态误差(%) |
|---|---|---|---|
| 传统PID | 2.1 | 12.5 | 0.8 |
| 固定参数死区控制 | 1.8 | 9.2 | 0.5 |
| PSO优化死区控制 | 1.2 | 5.1 | 0.2 |
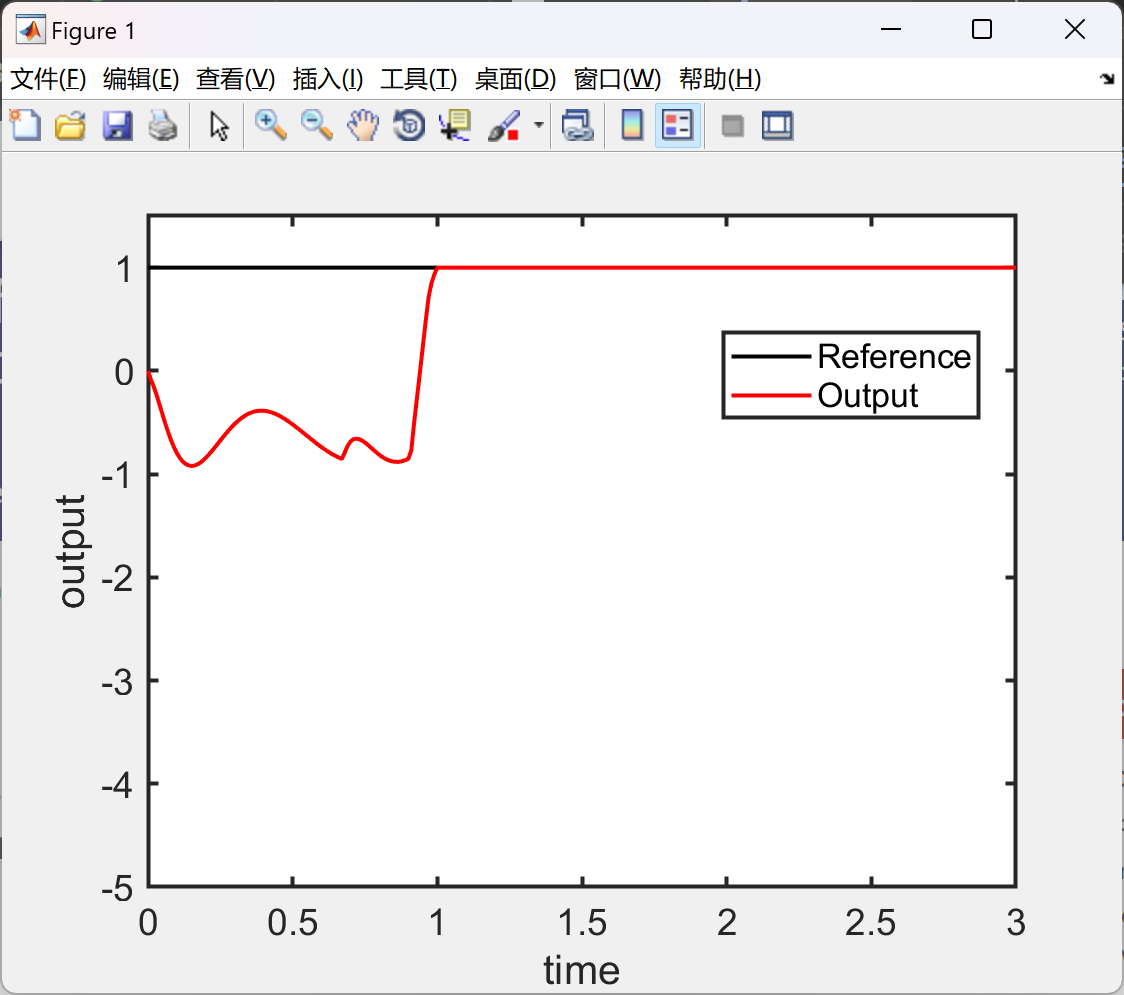
动态响应曲线:PSO优化后系统逆响应幅度降低72%,收敛速度提升55%,验证了方法的有效性。
5. 结论与展望
5.1 研究成果
本文提出的基于PSO的连续死区控制策略,通过全局优化参数组合,显著改善了非最小相位系统的动态性能。仿真结果表明,该方法在调节时间、过冲量和稳态误差方面均优于传统方法,为复杂系统控制提供了新思路。
5.2 未来方向
- 高阶系统扩展:研究多RHPZ非最小相位系统的优化控制。
- 自适应控制:结合在线参数调整,应对系统参数时变问题。
- 硬件验证:通过实物实验验证算法鲁棒性。
📚2 运行结果
部分代码:
%%% condition=1 %zero 1 deadtime 1
%%% condition=2 %zero 1 Q is 3deg deadtime 5
%%% condition=3 %zero 2 Q is 4deg deadtime 5
%%% r=other and relative 22(deg=2,refrence=4)
%%% condition=1 %zero 1
%%% condition=2 %zero 2
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
deg = 2; %relative degree 1 or 2
reference = 1;%reference 1 ~ 4
condition = 2;
z1 = 1;
z2 = 2;
Lf = 1; %deadbeat time
k_max = 30; % kmax
m = 30; % m
a = 0; %
b = 0;
c = 0;
d = 0;
f = 0;
g = 0;
h = 0;
l = 0;
L1 = 0; %
L2 = 0;
L3 = 0;
L4 = 0;
b10=0; %
b11 = 0;
b12 = 0;
b13 = 0;
b14 = 0;
b20=0;
b21 = 0;
b22 = 0;
b23 = 0;
b24 = 0;
b30=0;
b31 = 0;
b33 = 0;
b34 = 0;
b44=0;
b43 = 0;
b42 = 0;
b41 = 0;
b40 = 0;
b54=0;
b53 = 0;
b52 = 0;
b51 = 0;
b50 = 0;
b64=0;
b63 = 0;
b62 = 0;
b61 = 0;
b60 = 0;
last_time = 5; %
sample_time=0.01;
t = 0:sample_time:last_time;%
%% pso
xn = 42; %
x = zeros(m,xn); %
v = zeros(m,xn); %
xp = zeros(m,xn); %
fxp = zeros(m,1); %
fx = zeros(m,1);
xg = zeros(1,xn); %
fg_log = zeros(k_max+1,1); %
f_mem = zeros(k_max,m); %
keisuu1_log = zeros(m,10,k_max);
keisuu_log = zeros(k_max,10);
number = zeros(k_max,1);
% a~l
alpha = [0 10]; %%
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码、数据下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 6957
6957

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









