



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
基于模型预测控制(MPC)对永磁同步电机(PMSM)进行磁场定向控制(FOC),可以实现对PMSM速度的精确控制。MPC是一种基于系统动态模型的高级控制方法,它可以考虑系统的约束条件和未来预测,从而优化控制输入以实现所需的性能。在模拟中控制PMSM的速度时,MPC可以帮助提高系统的响应速度和鲁棒性,同时考虑到系统的动态特性和约束条件,从而实现更精确的速度控制。
一、理论基础
1. 磁场定向控制(FOC)的基本原理
FOC通过坐标变换(Clark变换 + Park变换)将三相静止坐标系下的电流转换为两相旋转坐标系(d-q轴)下的直流量,实现对励磁电流(idid)和转矩电流(iqiq)的独立控制:
- d轴:控制磁通(通常设 id=0 以实现最大转矩输出);
- q轴:控制转矩(直接决定转速)。
其数学模型包括: 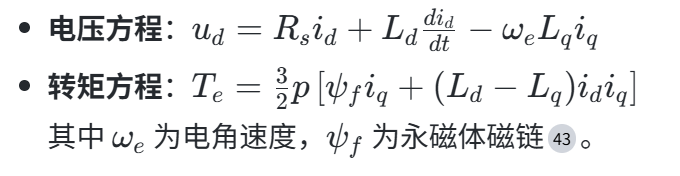
2. 模型预测控制(MPC)的核心机制
MPC在每个控制周期内执行三步:
-
预测模型:基于PMSM离散化动态方程(如定子电流 id,iqid,iq 的状态空间模型)预测未来 NN 步的状态;
-
滚动优化:求解代价函数最小值,例如:
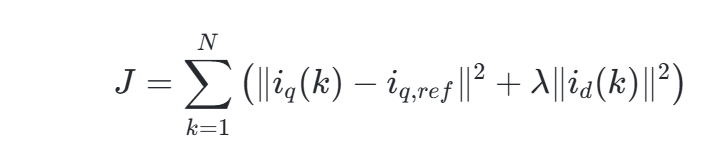
其中 λ 为权重因子,平衡转矩跟踪与磁链抑制;
-
反馈校正:将优化后的首个控制量(电压矢量)作用于逆变器,下一周期重新预测。
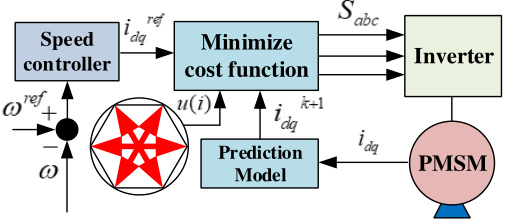
3. MPC与FOC的融合逻辑
在传统FOC中,电流环通常采用PI控制器。而MPC-FOC方案将MPC替代PI控制器作为电流内环:
- 外环:速度环(仍用PI控制器生成 iq,ref);
- 内环:MPC直接优化电压矢量,实现 iq→iq,ref 的快速跟踪。
二、MPC-FOC在速度控制中的优势
1. 动态响应与抗扰性
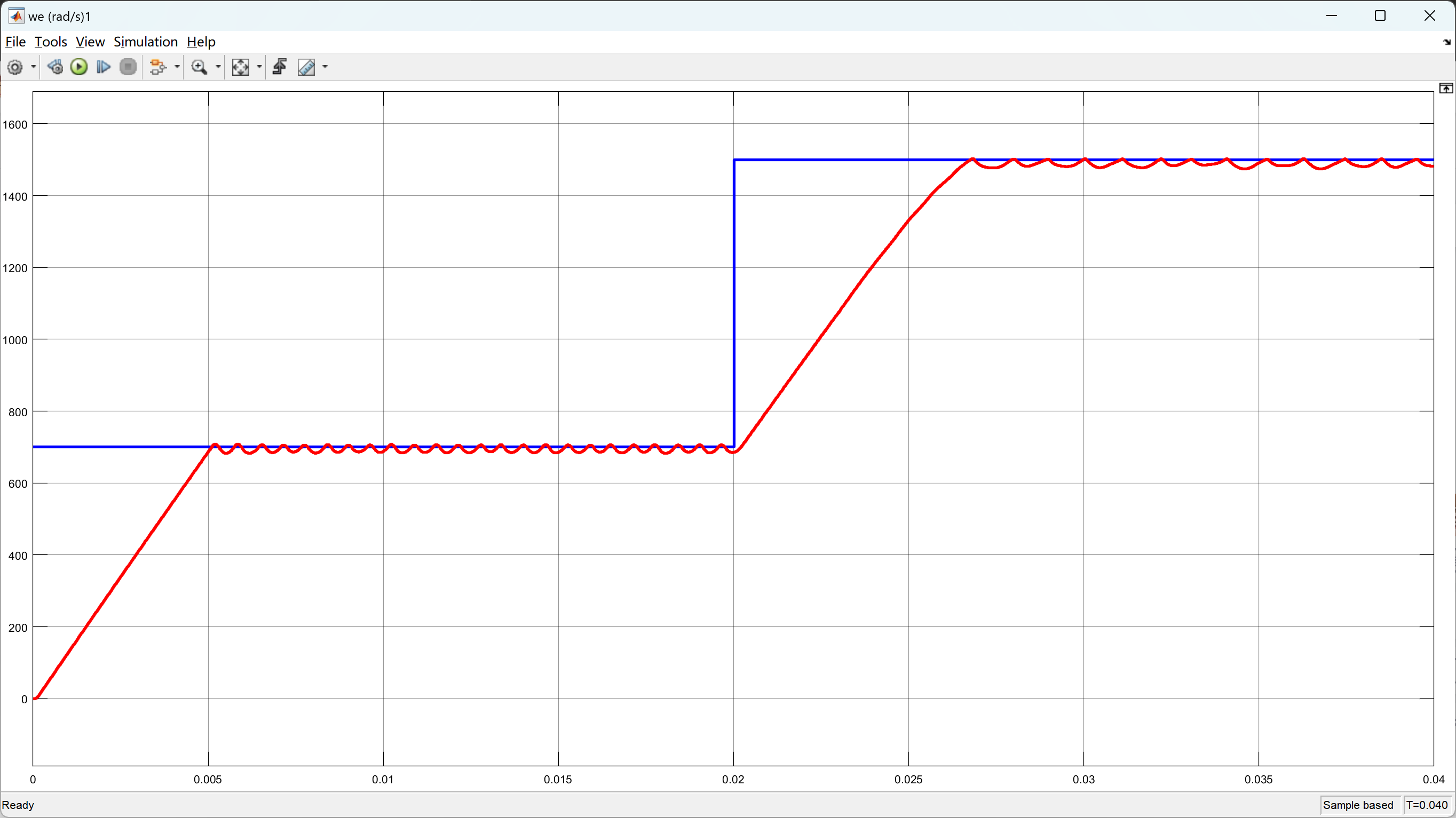
- 超调抑制:传统FOC在突加负载时转速可能跌落49%(如1000RPM → 510RPM),而MPC-FOC组合可将波动降至5%以内;
- 速度跟踪:MPC的预测优化使转速无超调(传统FOC超调达18%),且响应时间缩短30%。
2. 多目标优化能力
MPC可同时处理多个约束:
- 电压/电流限幅:避免逆变器过调制;
- 转矩脉动抑制:通过代价函数惩罚 iqiq 波动,降低转矩谐波;
- 弱磁控制:在高速域自动调节 idid 以维持电压极限。
3. 鲁棒性提升
- 对电机参数变化(如 Ld,LqLd,Lq 漂移)不敏感,因MPC在每个周期重新预测修正;
- 实验表明:在±20%参数偏差下,MPC-FOC的转速波动仍小于传统FOC。
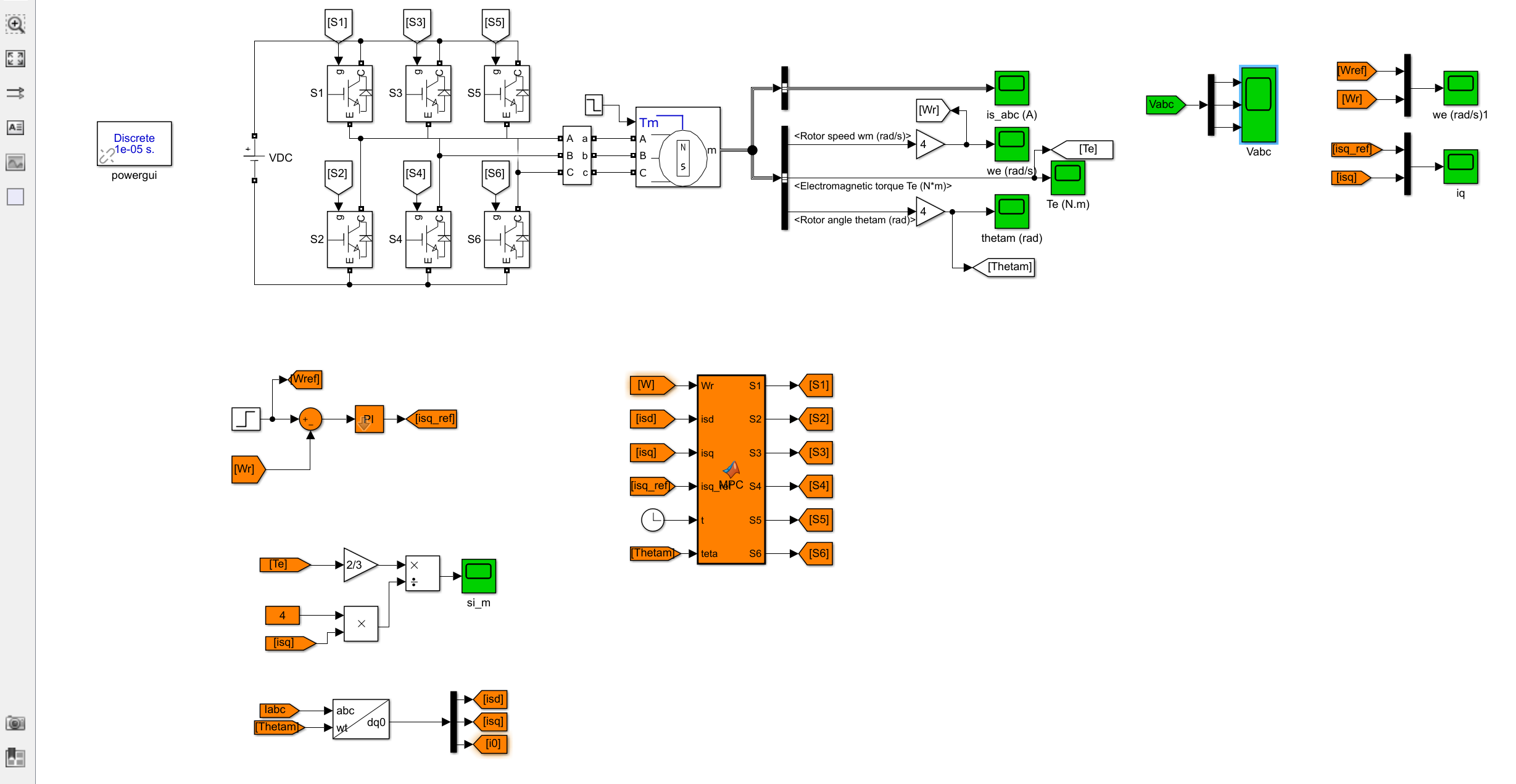
三、仿真实现方法与工具
1. 仿真平台
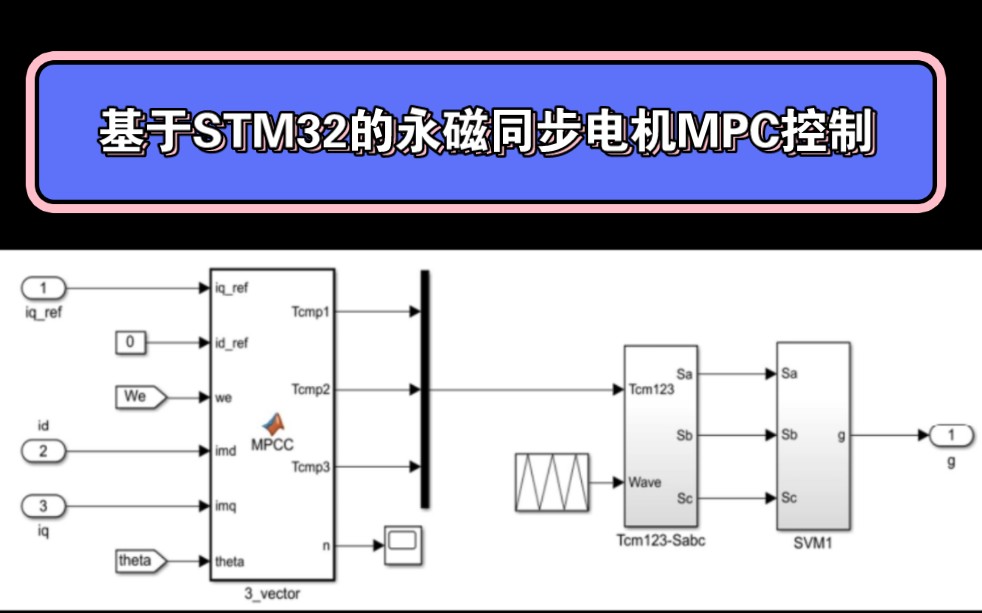
- MATLAB/Simulink:
- 内置模块:
PMSM本体、Clark/Park变换、SVPWM发生器; - 关键模型:
mcb_pmsm_foc_mpc_qep_f28379d(集成MPC电流环); - 工具包需求:Motor Control Blockset + Model Predictive Control Toolbox。
- 内置模块:
2. 建模步骤
- 电机参数辨识:通过离线实验获取 Rs,Ld,Lq,ψf;
- MPC控制器设计:
- 离散化模型:前向欧拉法
 ;
; - 代价函数:权重因子 λλ 需人工调整或通过ANN优化;
- 离散化模型:前向欧拉法
- 双闭环结构:

3. 性能对比仿真案例
| 控制策略 | 启动时间 (ms) | 突加负载转速跌落 (%) | 电流THD (%) |
|---|---|---|---|
| 传统FOC | 50 | 49 | 8.2 |
| MPC-FOC | 35 | 4 | 3.1 |
| 数据来源:Simulink对比实验(参考速度1000RPM) |
四、研究挑战与前沿方向
-
实时计算负担:
- MPC的在线优化需高频运算(>10kHz),需采用FPGA或专用MPC芯片加速;
- 解决方案:简化预测时域(如 N=2N=2)或使用显式MPC(eMPC)预计算解空间。
-
无传感器集成:
- 结合滑模观测器(SMO)或MRAS估计转子位置,消除编码器依赖;
- 实验显示:无传感器MPC-FOC在低速域估计误差<2°。
-
智能优化算法:
- 蚁群算法(ACO)优化MPC权重因子 λλ,进一步减少转矩脉动;
- 深度强化学习(DRL)训练MPC策略,适应极端工况。
结论
MPC-FOC通过预测优化替代PI电流环,显著提升PMSM速度控制的动态响应、抗扰性与多约束处理能力。Simulink仿真验证其超调抑制、转矩脉动降低等优势,但需解决实时计算挑战。未来方向聚焦智能算法融合与无传感器集成,推动其在电动汽车、航空航天等高动态场景的应用。
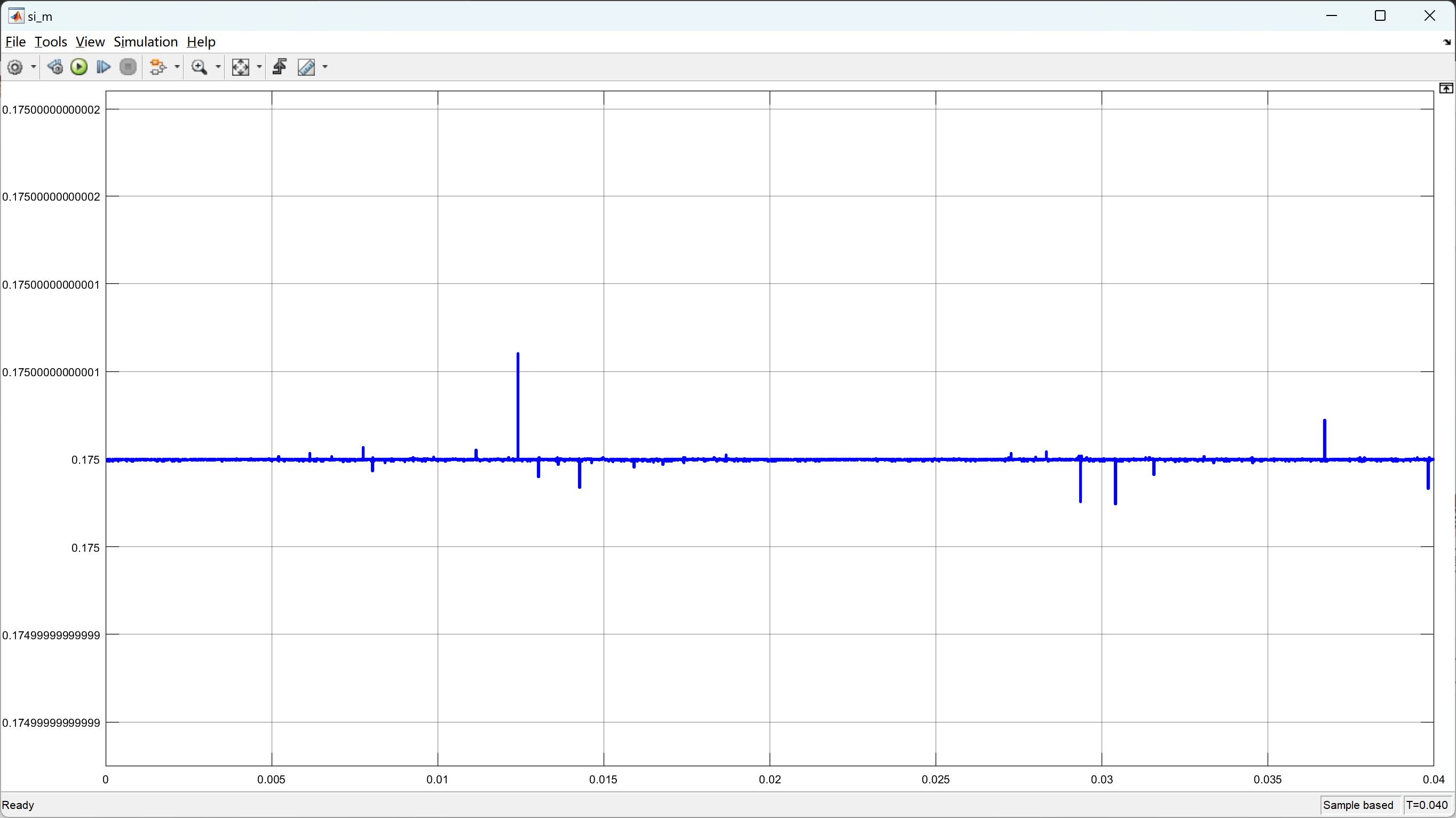
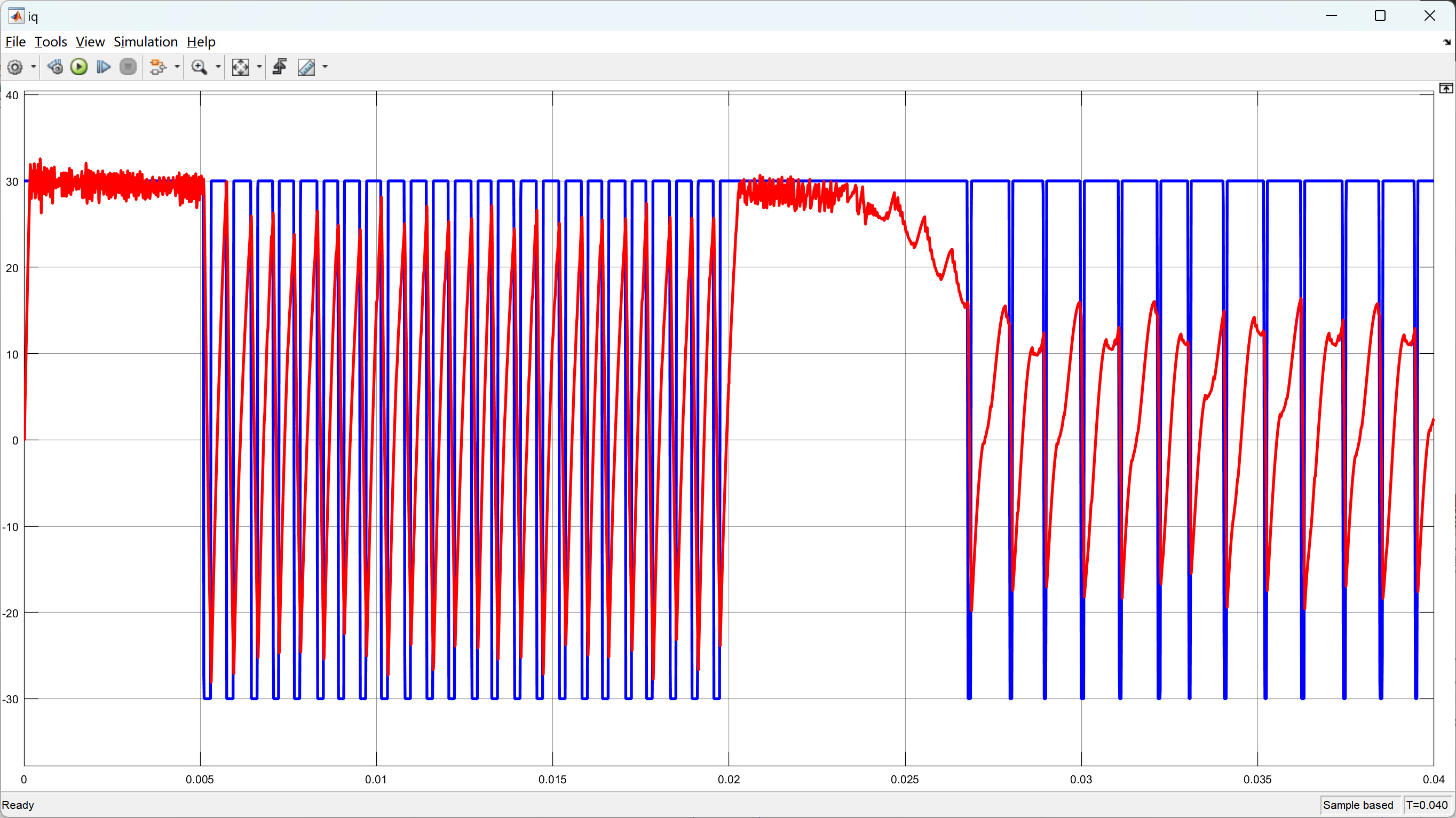
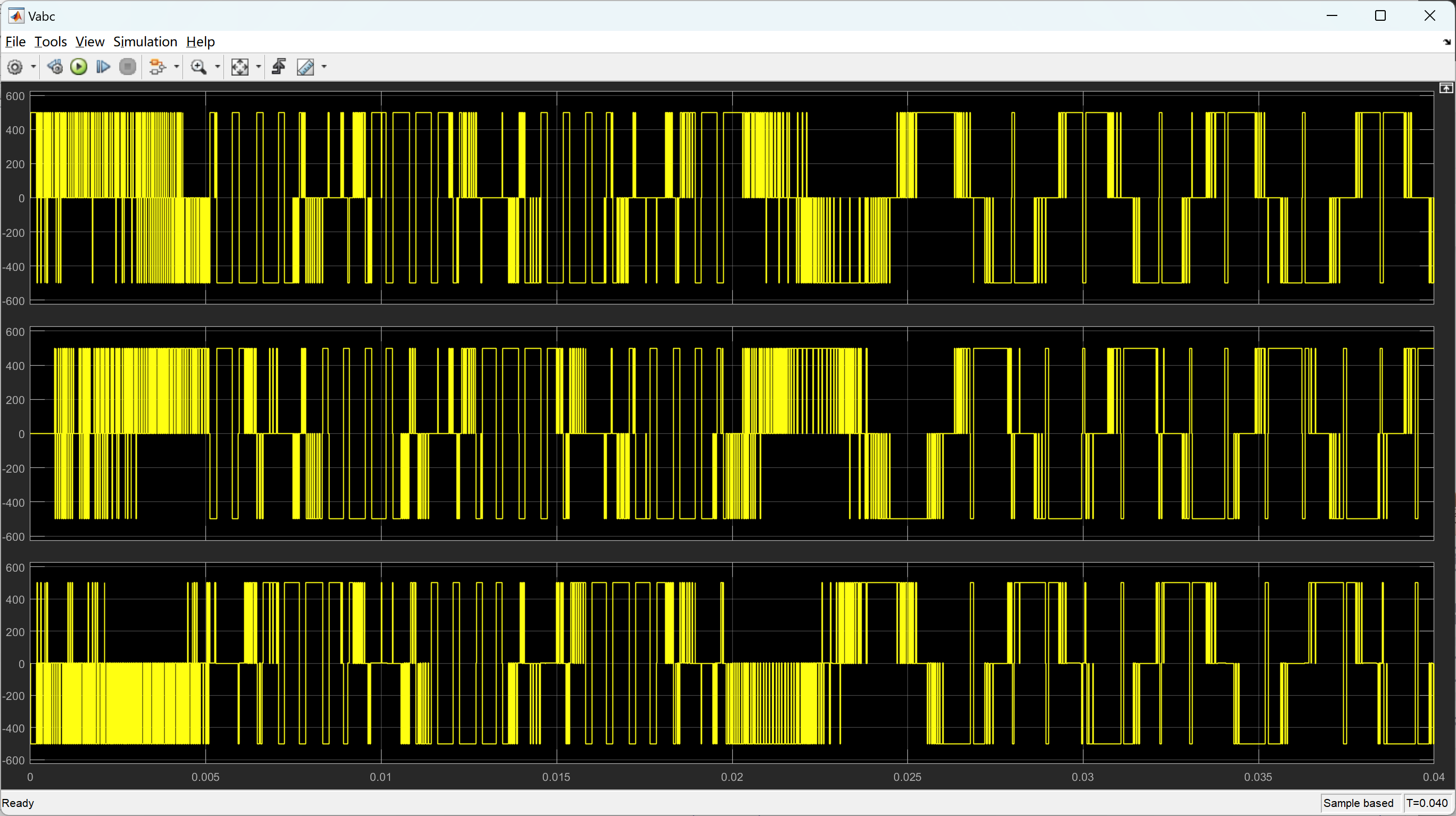
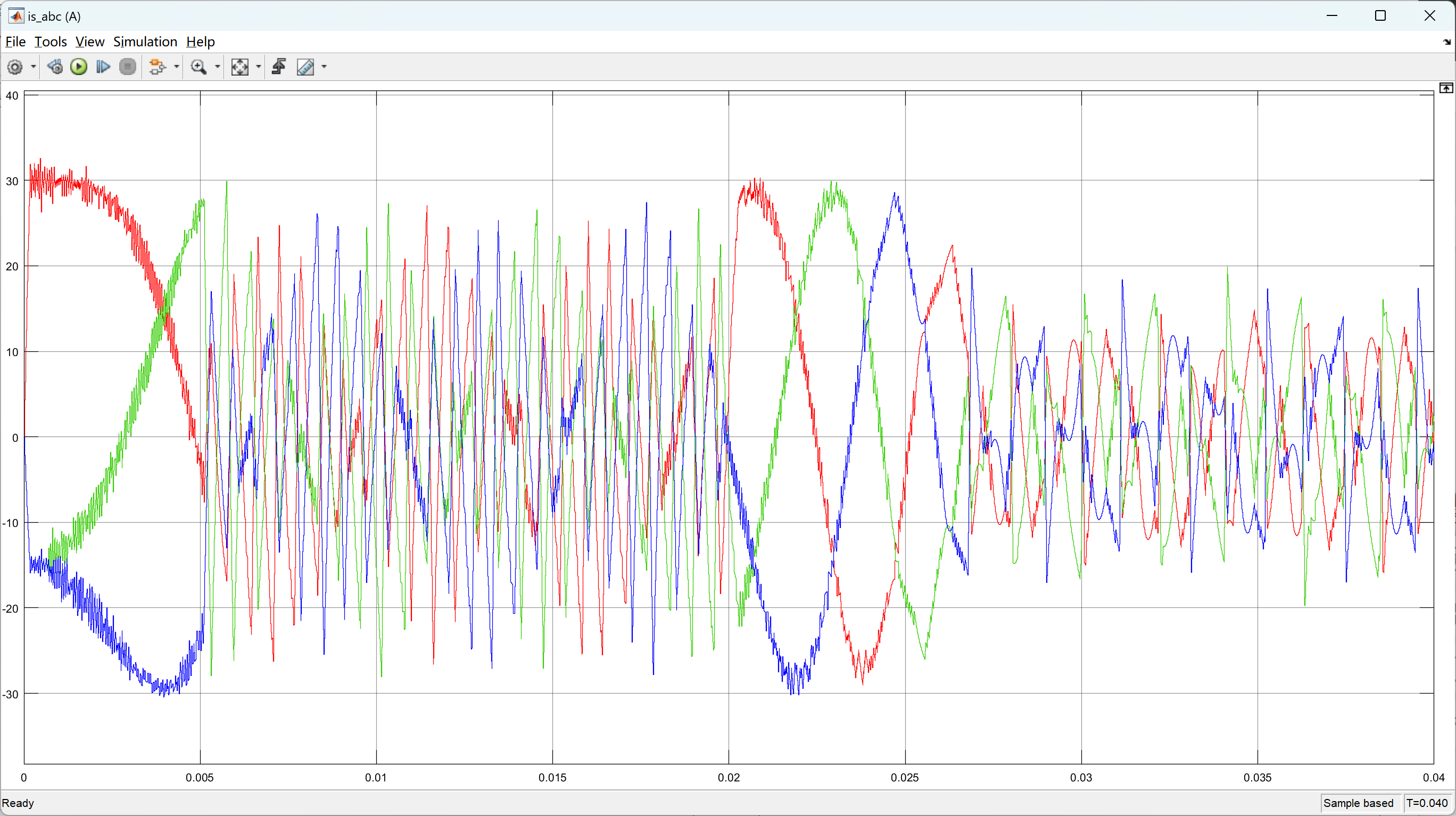
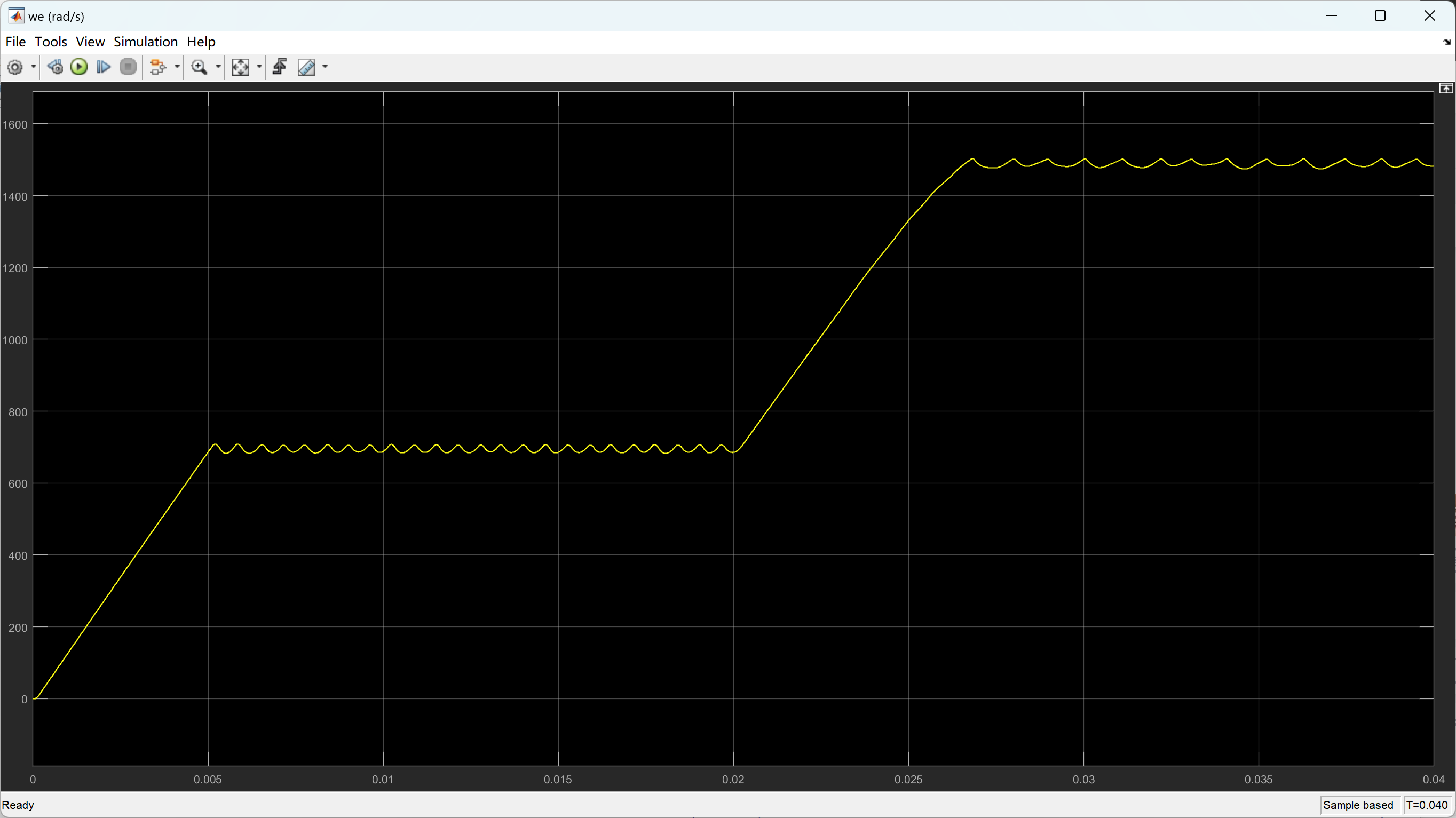
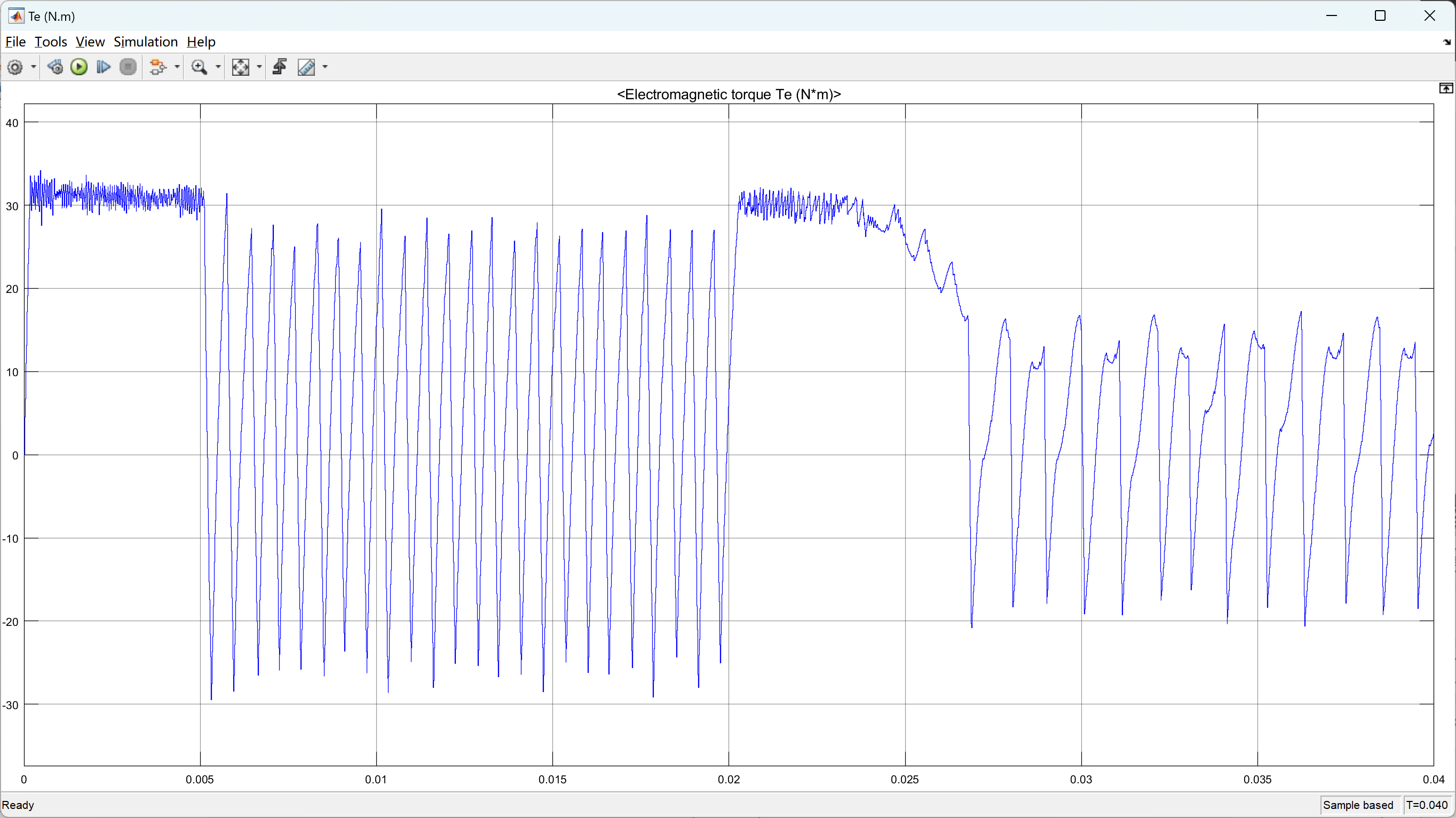
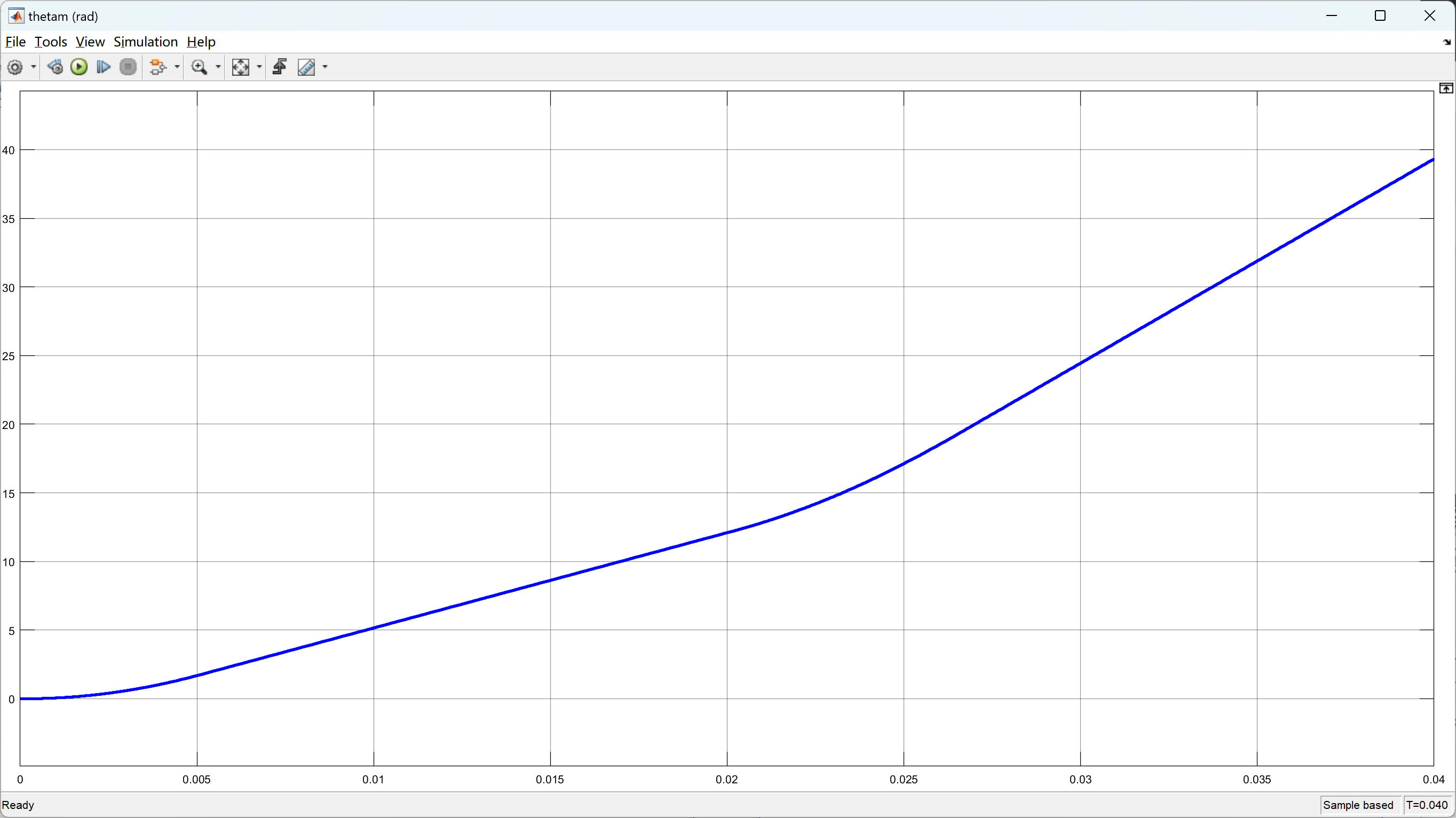
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]许伟奇.永磁同步电机模型预测控制及容错控制策略的研究[D].兰州交通大学[2024-01-27].DOI:CNKI:CDMD:2.1018.235978.
[2]刘旭东,张承慧,顾欣,等.基于模型预测和谐振调节器的PMSM电流控制[J].电气传动, 2016, 46(4):5.DOI:10.3969/j.issn.1001-2095.2016.04.003.
[3]郝晋霞,孟建华,田喜平.基于FOC的PMSM速度控制系统的研究[J].国外电子元器件, 2006, 000(011):8-10.

















 271
271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









