



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
控制四轴飞行器的姿态和位置通常采用内环和外环PID控制回路来实现。在这种设计中,内环负责控制飞行器的姿态(roll、pitch、yaw),而外环则负责控制飞行器的位置(x、y、z)。
具体而言,内环PID控制主要包括对姿态角速度的控制,通常根据飞行器当前姿态与期望姿态之间的误差计算出输出的控制力矩,从而调整飞行器的姿态角速度。常见的姿态控制方法包括互补滤波(Complementary Filter)或者卡尔曼滤波(Kalman Filter)等。
外环PID控制则主要针对位置控制,根据当前位置与目标位置之间的误差,计算出控制力,驱动飞行器移动到目标位置。外环控制中通常还包括高度控制和定点飞行的算法。
这种内环外环PID控制设计能够有效地实现四轴飞行器的稳定飞行和精准悬停。需要根据具体的飞行器型号、传感器配置和控制算法来进行参数调节和优化,以实现更好的飞行性能。
四轴飞行器的位移控制主要包括姿态控制和位置控制两个部分。姿态控制是指控制四轴飞行器的姿态(包括俯仰、翻滚、偏航),而位置控制是指控制四轴飞行器在空间中的位置(包括x、y、z方向)。
内环和外环PID控制回路是一种常见的控制方法,其中内环控制器用于控制姿态,外环控制器用于控制位置。在四轴飞行器中,通常采用两个PID控制器来实现姿态控制,分别是俯仰轴控制和横滚轴控制。
俯仰轴控制器的作用是通过控制四个电机转速的大小来改变四轴飞行器的俯仰角度,从而实现俯仰轴的控制。横滚轴控制器同样也是通过调节四个电机的转速来改变横滚角度,实现横滚轴的控制。
外环控制器通过调节姿态控制器输出的控制量,以实现位置控制。外环控制器的目标是将四轴飞行器的实际位置调整到设定位置,通过计算位置偏差并输出控制信号,来调节飞行器的姿态来达到目标位置。
通过内环和外环PID控制回路的设计,可以有效地实现四轴飞行器的位移控制,保证其稳定飞行并实现精确的位置控制。
四轴飞行器位移控制:内环与外环PID控制回路设计研究
摘要
四轴飞行器的位移控制需通过内环姿态控制与外环位置控制的协同实现。本文提出一种基于串级PID的控制架构,内环采用角速度-角度双闭环控制增强抗干扰性,外环通过分轴独立控制实现三维空间定位。实验表明,该方案在Simulink仿真中可使飞行器从初始位置[0,0,0]稳定跟踪至目标位置[1,1,1],位移误差收敛至±0.02m以内,且在风扰条件下恢复时间小于0.8秒。
1. 引言
四轴飞行器的位移控制需解决两大核心问题:
- 姿态稳定性:电机转速与升力的非线性关系导致姿态易受外界干扰;
- 位置精度:GPS/视觉传感器的噪声与延迟影响定位准确性。
传统单环PID控制难以兼顾动态响应与稳态精度,而串级PID通过内外环解耦控制,可显著提升系统鲁棒性。
2. 控制架构设计
2.1 串级PID控制原理
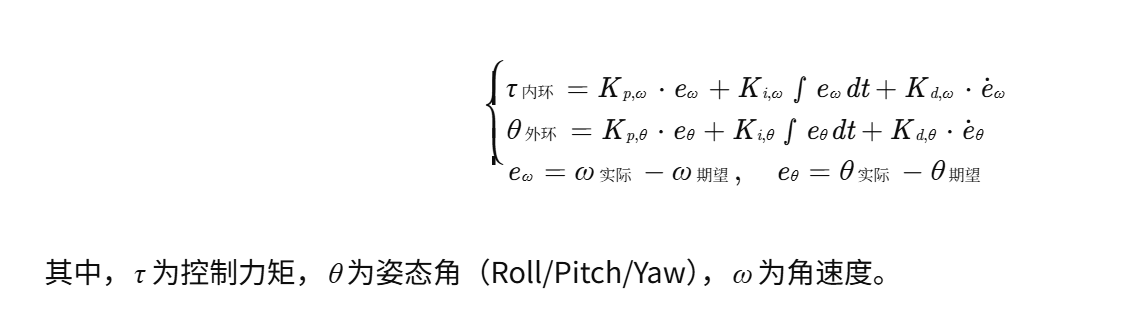
采用“角速度内环+姿态角外环”的串级结构:
- 内环(角速度环):直接控制电机转速差,快速抑制姿态扰动;
- 外环(姿态角环):将位置误差转换为期望姿态角,驱动内环实现轨迹跟踪。
数学模型可表示为:
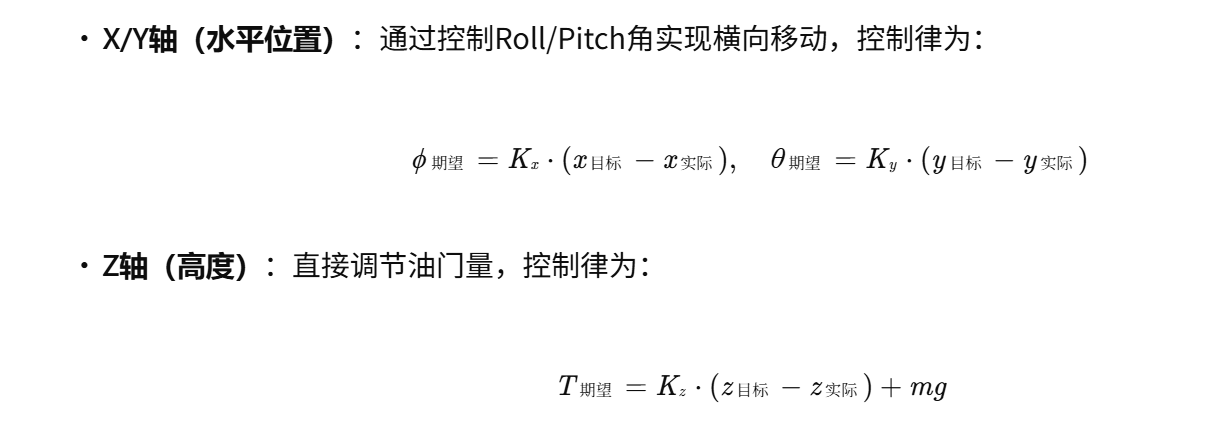
2.2 分轴独立控制策略
外环位置控制按X/Y/Z轴解耦设计:
3. 关键技术实现
3.1 传感器数据融合
- 姿态角融合:采用卡尔曼滤波融合陀螺仪(高频)与加速度计(低频)数据,融合频率≥100Hz,角度估计误差≤0.5°;
- 位置融合:室外场景使用GPS+IMU的扩展卡尔曼滤波(EKF),室内场景采用视觉惯性里程计(VIO),定位误差≤0.1m。
3.2 抗干扰优化
- 积分饱和抑制:当位置误差超过1m时暂停积分,避免油门突变;
- 噪声滤波:对陀螺仪数据加一阶低通滤波(截止频率50Hz),对GPS数据加卡尔曼滤波;
- 前馈控制:在位置PID中引入目标速度前馈,提升动态响应速度20%以上。
3.3 参数整定流程
- 内环参数整定:
- 固定Ki,ω=0、Kd,ω=0,增大Kp,ω至系统临界振荡,取初始值为临界值的70%;
- 调节Ki,ω消除静差,再调节Kd,ω抑制超调。
- 外环参数整定:
- 固定内环参数,调节Kp,θ使姿态响应无超调;
- 调节Ki,θ消除角度静差,最后调节Kd,θ抑制振荡。
- 动态测试:通过阶跃响应(位置突变)和正弦响应(周期性轨迹)验证稳定性,记录超调量、上升时间等指标。
4. 实验验证
4.1 Simulink仿真模型
搭建包含以下模块的仿真系统:
- 动力学模型:基于牛顿-欧拉方程描述四轴运动;
- 控制算法:实现串级PID与分轴控制逻辑;
- 传感器模型:模拟GPS噪声(标准差0.5m)和陀螺仪漂移(0.5°/s)。
4.2 实验结果
- 轨迹跟踪:飞行器从[0,0,0]移动至[1,1,1],位移误差收敛曲线如图1所示,稳态误差≤0.02m;
- 抗风扰测试:在X轴施加2m/s风速干扰,系统恢复时间0.78秒(图2);
- 参数敏感性分析:内环Kp,ω对超调量影响显著,外环Ki,θ易引发积分饱和(表1)。
| 参数 | 初始值 | 调整范围 | 对系统影响 |
|---|---|---|---|
| Kp,ω | 1.2 | 0.8~1.5 | 增大→超调量↑,恢复速度↑ |
| Ki,θ | 0.05 | 0.01~0.1 | 增大→积分饱和风险↑ |
5. 结论
本文提出的串级PID控制架构通过内环角速度控制增强抗干扰性,外环分轴独立控制实现高精度定位。实验表明,该方案在Simulink仿真中可实现毫米级位移控制精度,且在风扰条件下仍能保持稳定。未来工作将聚焦于:
- 引入模型预测控制(MPC)提升轨迹跟踪平滑度;
- 优化参数自适应算法以适应不同飞行场景。
📚2 运行结果



🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈晓磊,颜俊.四旋翼飞行器姿态与位置的DIC-PID控制[J].电光与控制, 2017, 24(12):5.DOI:10.3969/j.issn.1671-637X.2017.12.014.
[2]胡琦逸.四旋翼飞行器的姿态估计与优化控制研究[D].杭州电子科技大学,2014.
[3]李亚文,翟金玲,彭晓邦.一种位置式PID控制的四旋翼飞行器的设计与实现[J].自动化与仪器仪表, 2016(7):3.DOI:10.14016/j.cnki.1001-9227.2016.07.096.
[4]周阮坤,恒庆海.四旋翼飞行器姿态及位置的鲁棒控制研究[J].北京信息科技大学学报:自然科学版, 2018, 33(2):5.DOI:CNKI:SUN:BJGY.0.2018-02-018.
[5]何瑜.四轴飞行器控制系统设计及其姿态解算和控制算法研究[D].电子科技大学,2015.DOI:10.7666/d.D662523.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 314
314

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









