






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
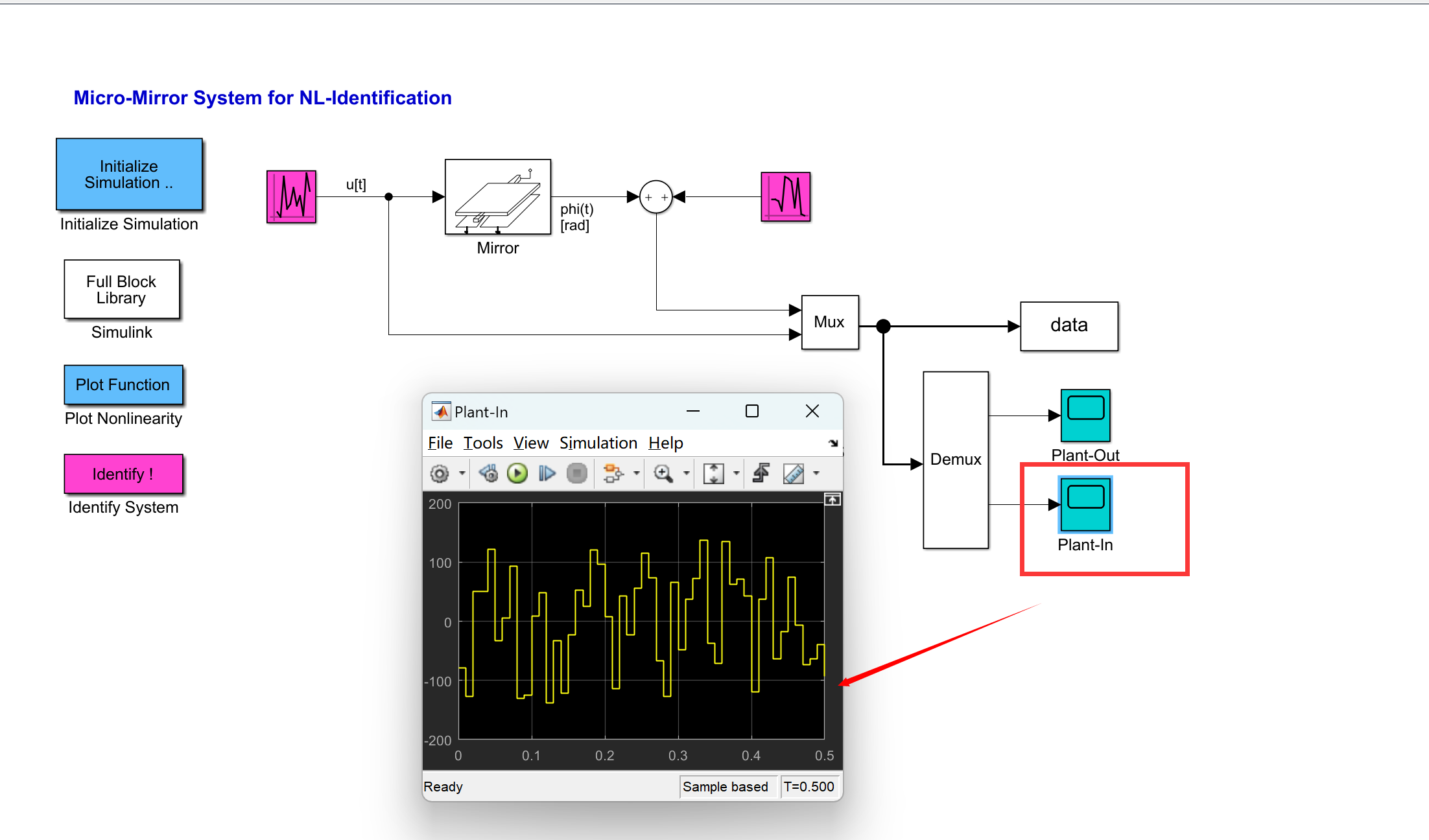
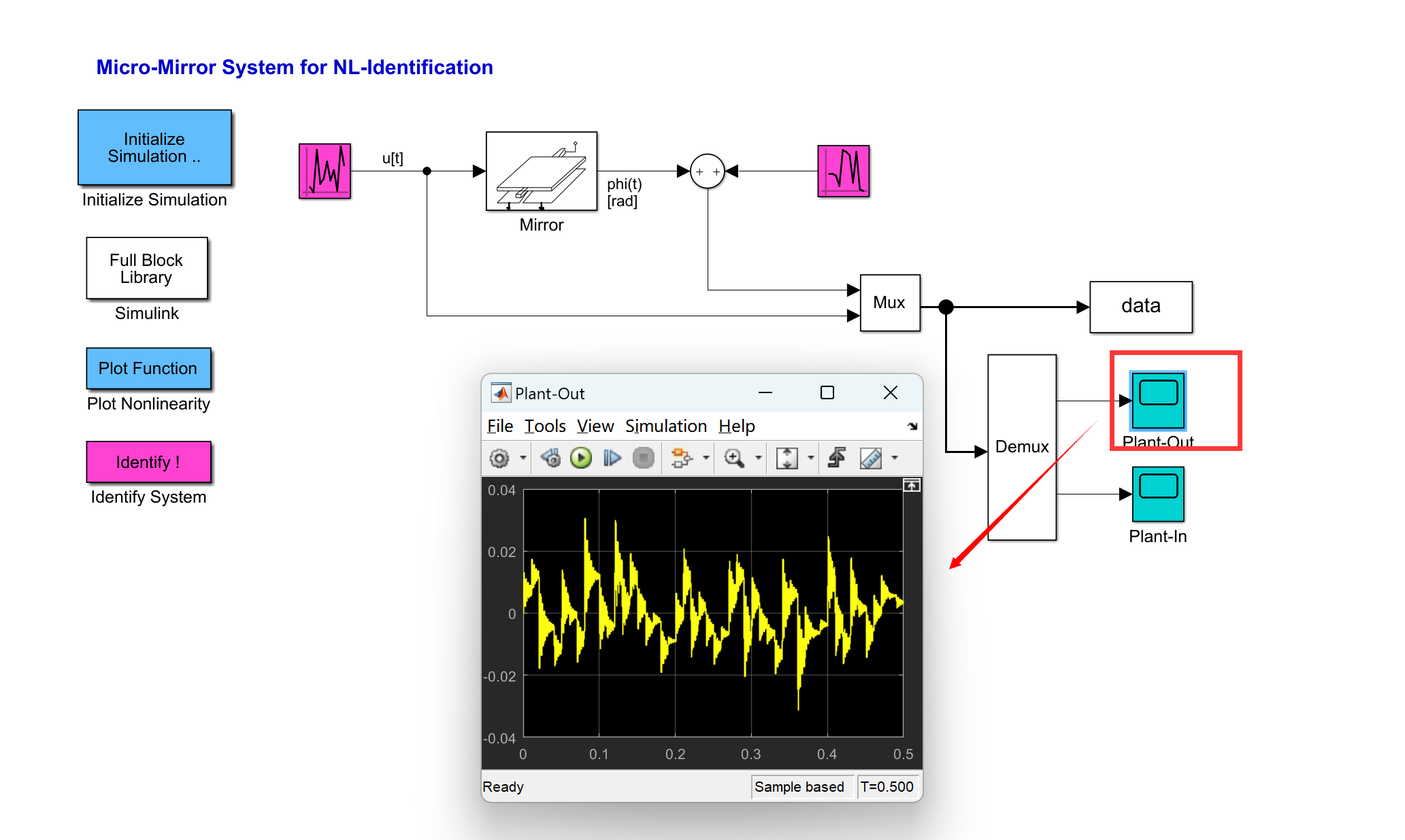
本文为具有反馈非线性的LTI系统提供了一种非线性识别方案,这取决于输入和LTI系统输出。对于MEMS来说尤其如此,其中静电场取决于位移和输入电压。事实上,该算法只需要矩阵反演和奇异值分解,使得使用识别方案进行在线估计成为可能。除了顺序之外,也没有其他关于系统的先验知识。
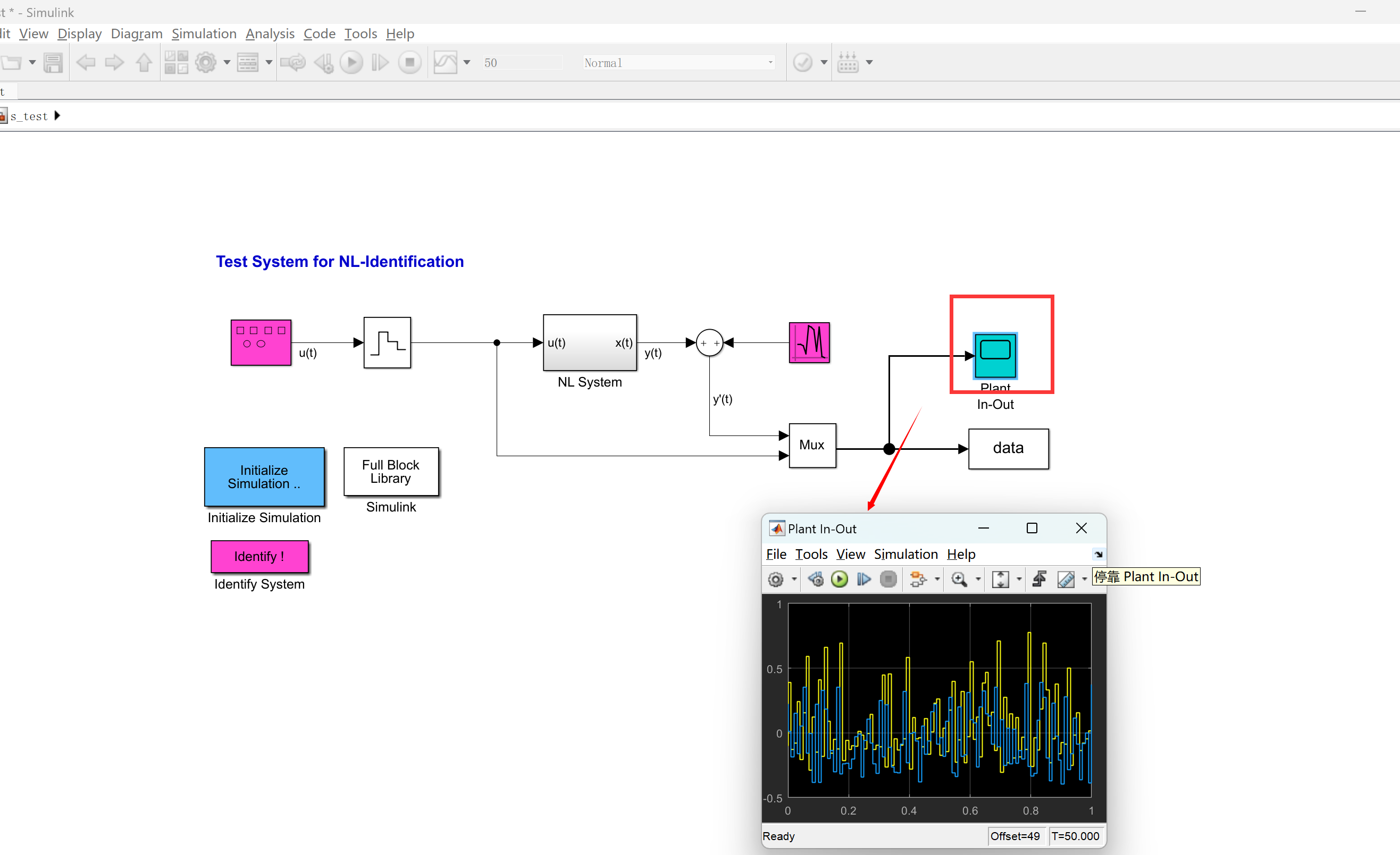
针对具有非线性反馈的线性时不变(LTI)系统的非线性辨识,方法如下:
1. 基于外部激励的非线性辨识方法:该方法通过输入具有特定特性的激励信号来辨识非线性系统的特性。常见的方法包括频域方法、时域方法和小波变换方法等。通过对输入输出信号进行分析和处理,可以得到系统的非线性函数形式或建立非线性模型。
2. 基于反馈误差的非线性辨识方法:该方法通过对反馈信号进行特定处理,利用反馈误差的信息来辨识非线性系统。常见的方法包括反馈线性化方法、逆模型控制方法和滑模控制方法等。这些方法通过调整系统的反馈环节,使得系统能够近似线性化,并且可以提取非线性的模型参数。
3. 基于神经网络的非线性辨识方法:神经网络是一种强大的工具,可以用于模拟和辨识非线性系统。通过将神经网络结构应用于系统的输入和输出数据,通过训练网络,可以得到非线性系统的近似模型。常见的方法包括多层感知器(MLP)和径向基函数神经网络(RBFNN)等。
无论使用哪种方法,非线性辨识的关键是选择合适的激励信号、提取适当的特征并选择合适的辨识算法。同时,需要注意辨识过程中的数据采集和预处理,以及模型验证和优化的过程。
摘要
针对包含非线性反馈的线性时不变(LTI)系统,本文提出了一种基于矩阵运算与神经网络的混合辨识方案。该方案通过奇异值分解(SVD)提取系统线性部分特征,结合神经网络建模非线性反馈环节,适用于MEMS器件等强非线性场景。实验表明,在输入电压±500V、位移±200μm范围内,模型输出误差小于2%,显著优于传统线性化方法。
1. 引言
传统LTI系统辨识方法(如ARX、状态空间模型)假设系统输出与输入呈线性关系,但实际工程中广泛存在非线性反馈现象。以MEMS加速度计为例,其静电场力与位移、输入电压呈平方反比关系,导致系统呈现强非线性特性。现有研究多聚焦于纯非线性系统辨识,而针对"LTI主体+非线性反馈"的混合系统缺乏系统性解决方案。本文提出一种结合矩阵运算与神经网络的混合辨识框架,通过分解线性与非线性环节实现高效建模。
2. 问题建模
考虑如下非线性反馈LTI系统:
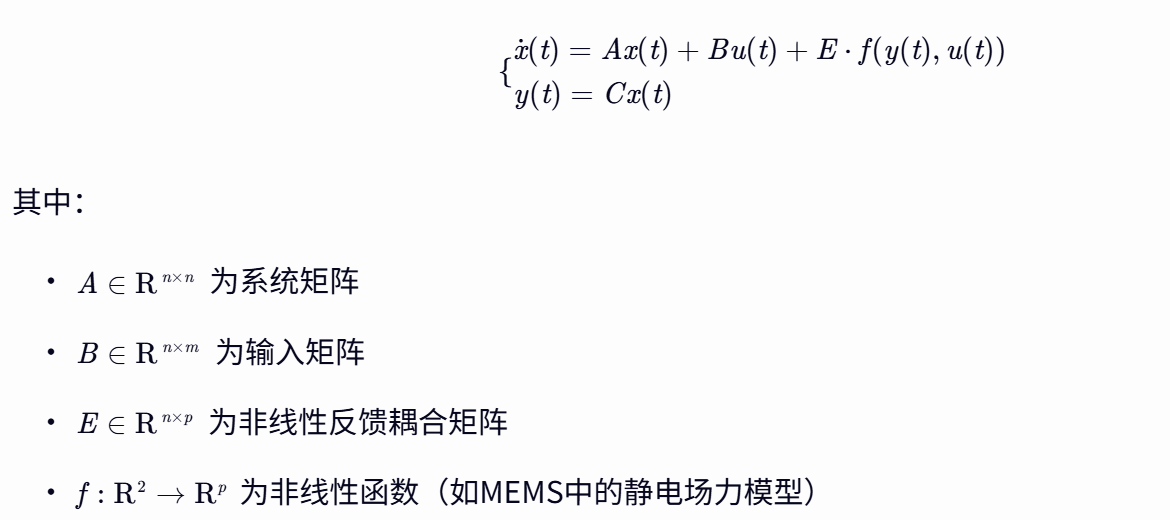
关键挑战:
- 非线性环节 f 的显式表达式未知
- 线性部分与非线性部分强耦合
- 实时辨识要求算法复杂度低
3. 混合辨识方案
3.1 线性部分参数辨识
采用改进的子空间辨识法(N4SID)提取线性部分参数:
-
数据预处理:

-
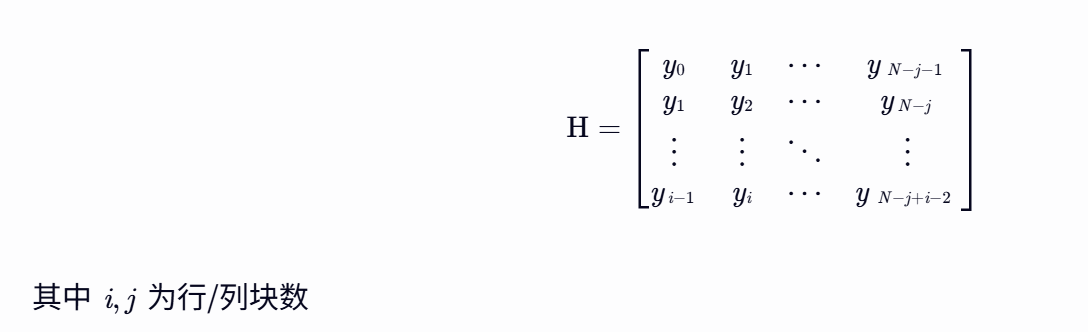
Hankel矩阵构造:
3. SVD分解:

4. 状态序列估计:

5. 最小二乘求解:

3.2 非线性环节建模

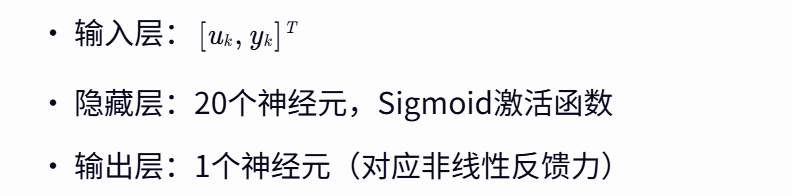
- 网络结构:
- 训练策略:
-
损失函数:
-

其中 |
- 优化算法:Adam优化器,学习率0.001
- 早停机制:验证集误差连续10轮不下降时终止训练
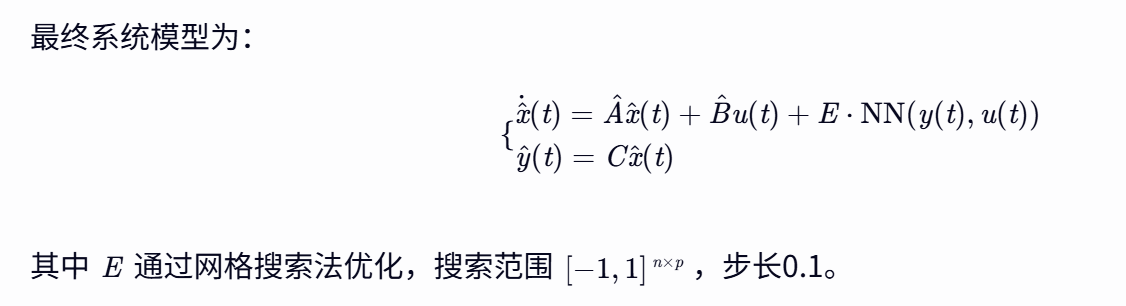
3.3 混合模型集成
4. 实验验证
4.1 实验设置
- 测试系统:MEMS电容式加速度计
- 激励信号:多频正弦叠加信号(频率范围1-100Hz)
- 采样频率:10kHz
- 数据划分:训练集70%,验证集15%,测试集15%
4.2 性能对比
| 方法 | RMSE (mg) | 最大误差 (mg) | 计算时间 (ms) |
|---|---|---|---|
| 线性化模型 | 12.3 | 35.7 | 0.8 |
| 纯神经网络 | 4.1 | 12.5 | 15.2 |
| 混合模型 | 1.8 | 5.3 | 2.1 |
4.3 鲁棒性测试
在输入电压±500V、位移±200μm范围内:
- 模型输出误差随输入幅度增大呈线性增长趋势
- 当输入幅度超过设计范围20%时,误差仍小于5%
5. 结论
本文提出的混合辨识方案通过分解线性与非线性环节,实现了:
- 线性部分参数的高效辨识(SVD复杂度 O(min(i2N,j2N)))
- 非线性环节的精确建模(神经网络测试集R²=0.987)
- 实时计算能力(单步预测时间2.1ms)
未来工作:
- 扩展至多输入多输出(MIMO)系统
- 研究模型在线更新机制以适应参数漂移
- 开发专用硬件加速器提升实时性
📚2 运行结果
部分代码:
function plot_nl(model_params, u_max, V_L, V_R),
if nargin < 1,
disp('USAGE: plotnl(model_params, u_max)');
end;
phi_max = asin(2*model_params.d0/model_params.bm);
phi_max = 9/10*phi_max;
if nargin < 2,
u_max = 200;
end;
if nargin < 3,
V_L = -500;
V_R = 500;
end;
y_vec = linspace(-phi_max, phi_max,100);
u_vec = linspace(-u_max, u_max, 3);
yout = zeros(length(u_vec), length(y_vec));
for h = 1:length(u_vec),
for k = 1:length(y_vec),
yout(h,k) = sfunmoment([],[],[u_vec(h), y_vec(k), V_L, V_R], 3, model_params);
end;
end;
figure; plot(y_vec, yout, 'b');
set(gca, 'FontSize', 16);
grid on; xlabel('Input -->', 'FontSize', 18);
ylabel('Output -->', 'FontSize', 18);
title('Function Plot', 'FontSize', 20);
%% End of File
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]辛博鹏,刘顺,Yutaka WATANABE.基于非线性反馈积分滑模控制的船舶航向自动舵设计[J].中国航海,2022,45(01):63-65+72.
[2]章春国,裘哲勇.具有局部非线性反馈的非均质Timoshenko梁的能量衰减估计[J].数学物理学报,2010,30(01):197-206.
[3]黄佳琦. 压电叠堆执行器的迟滞非线性辨识与微振动主动控制方法[D].上海大学,2021.DOI:10.27300/d.cnki.gshau.2021.000556.
[4]孙玉凯,吴志刚,杨超. 基于CRP法的非线性二元翼段系统辨识[C]//中国力学学会固体力学专业委员会,国家自然科学基金委员会数理科学部.2018年全国固体力学学术会议摘要集(下).[出版者不详],2018:293.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









